
Fターム[5L096FA67]の内容
Fターム[5L096FA67]に分類される特許
61 - 80 / 1,697
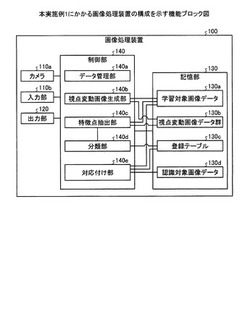
画像処理プログラム、画像処理方法および画像処理装置
【課題】各画像の座標を対応付ける場合の計算量を削減すること。
【解決手段】画像処理装置100は、学習対象画像データ130aおよびカメラ視点の異なる視点変動画像データ群130bから特徴点を抽出し、各特徴点を分類して、登録テーブル130cを生成する。画像処理装置100は、登録テーブル130cの各特徴点群の重心座標と、認識対象画像データ130dから抽出した特徴点の座標とを比較して、学習対象画像データ130aの特徴点と認識対象画像データ130dの特徴点とを対応付ける。
(もっと読む)
移動物体追跡装置及び参照点追跡方法

【課題】移動物体上のある点に対して移動物体の移動速度方向から所定角度だけ回転した方向に所定長離れた点の位置を精度良く把握可能な移動物体追跡装置を提供する。
【解決手段】移動物体の所定の部位を画像追跡点として撮像し、取得した画像追跡点の画像データより、追跡のための追跡原点座標と移動物体の画像追跡点の座標との差異を表す追跡誤差を得る。この追跡誤差に基づいて、追跡角速度に移動物体に対する撮像器の追従遅れを補正した視軸角速度を算出する。同時に、移動物体との間の相対距離と、移動物体追跡装置自身の移動速度を計測する。得られた視軸角速度と相対距離と移動物体追跡装置自身の移動速度に基づいて、画像追跡点から移動物体の移動速度方向から所定の角度だけ回転した方向に所定長さだけ離れた参照点を追跡するための参照点追跡角度を算出する。
(もっと読む)
情報処理装置、情報処理方法、およびプログラム
【課題】料理画像に写っている料理の組み合わせを判別する。
【解決手段】本開示の一側面である情報処理装置は、画像の被写体領域を検出する検出部と、検出された前記被写体領域毎に、少なくとも前記被写体領域の位置情報を含む特徴量を生成する特徴量生成部と、前記被写体領域毎に生成された特徴量を組み合わせて、前記画像に対応する組み合わせ特徴量を生成する組み合わせ特徴量生成部と、生成された前記組み合わせ特徴量に基づいて、前記画像に写っている被写体の組み合わせに対応するラベルを判別する判別部とを備える。本開示は、例えば、料理画像に写っている料理の組み合わせを判別する場合に適用できる。
(もっと読む)
画像処理装置、画像処理方法、およびプログラム
【課題】入力画像の画像劣化を客観的な指標で検出して、検出結果に基づいて復元画像または画像分類を実行する。
【解決手段】入力画像の特徴量の平面分布を算出する特徴量算出部と、特徴量の平面分布に基づいて入力画像の画像劣化方向を得る特徴量解析部と、を備える画像処理装置を提供する。特徴量算出部は、入力画像を周波数変換して、特徴量の平面分布を算出してよい。また、特徴量算出部は、入力画像の縦方向および横方向の画素値の差分をそれぞれ算出して、特徴量の平面分布を得てもよい。
(もっと読む)
画像処理装置及び画像処理プログラム
【課題】画像に使用されているドット集中型スクリーンの線数と角度を抽出するにあたって、本構成を有していない場合に比較して、処理量を削減するようにした画像処理装置を提供する。
【解決手段】画像処理装置の特徴点抽出手段は、画像内の領域の角に位置する画素である特徴点と該領域内における該特徴点の位置関係を示している方向を抽出し、選定手段は、特徴点の色と該特徴点の位置と該特徴点における方向に基づいて、特徴点と該特徴点に対応する特徴点の組を選定し、代表点決定手段は、特徴点の組に基づいて、領域を代表する代表点を決定し、ベクトル算出手段は、前記代表点決定手段によって決定された代表点に基づいて、2つの代表点で構成されるベクトルを算出し、スクリーン線数角度抽出手段は、前記ベクトル算出手段によって算出されたベクトルの分布に基づいて、前記画像内に使用されているスクリーンの線数と角度を抽出する。
(もっと読む)
画像類似度算出装置、画像類似度算出方法、画像類似度算出プログラム及び記録媒体
【課題】反転関係にある画像同士が類似していると判断することができる画像類似度算出装置、画像類似度算出方法、画像類似度算出プログラム及び記録媒体を提供する。
【解決手段】画像類似度算出装置1は、入力画像30と参照画像31との類似度を算出する装置である。この装置は、局所特徴量抽出部12及び類似度算出部14を備える。局所特徴量抽出部12は、入力画像30及び参照画像31の特徴点を取得し、入力画像30及び参照画像31の特徴点ごとに回転及び反転に対して不変となる特徴量を記述する。類似度算出部14は、入力画像30及び参照画像31の特徴点ごとの特徴量に基づいて、入力画像30と参照画像31との類似度を算出する。
(もっと読む)
面法線計測装置、面法線計測システム及び面法線計測プログラム
【課題】物体表面の反射特性に鏡面反射成分を含むことを必要とせず、物体表面までの距離の計測も必要とせずに面法線を計測する。
【解決手段】面法線計測システム1は、ガイドレールRx,Ryに沿って、互いに直行する平面内を移動して物体OBJに対する照明方向を変化させる照明装置30と、物体OBJを撮影する撮影装置40と、撮影装置40によって撮影された画像に基づいて物体OBJの表面の面法線を計測する面法線計測装置10とを備える。面法線計測装置10は、物体OBJの画像を2値化し、画素ごとに、照明方向と明暗とが対応付けられた陰影ベクトルを作成し、予め形状が既知の参照物体について作成した参照陰影ベクトルと面法線とが対応付けられたデータベースを参照して、物体OBJの陰影ベクトルと最も類似する参照陰影ベクトルに対応付けられた面法線を、その画素における面法線と推定する。
(もっと読む)
動き検出装置
【課題】測定対象物の移動方向が変化した場合であっても、これを即時に検出して測定対象物の移動速度を求めることが可能な動き検出装置を提供する。
【解決手段】特徴領域に対応する画素の投票値のうち、中央の画素にピークが存在する場合には、測定対象物の移動方向が反転したものと判断する。そして、移動方向が反転した場合には、各特徴領域に対応する画素の投票値のうち、方向変化前の影響による投票値と方向変化後の影響による投票値に分類する。そして、方向変化後の影響による投票値に基づき、これを補正して測定対象物の速度を算出する。従って、測定対象物の移動方向が変化した場合には、これを即時に認識し、測定対象物の移動速度検出に反映させることが可能となる。
(もっと読む)
線分および円弧検出装置
【課題】ノイズの影響を抑制し、高い精度で線分あるいは円弧の検出を行うことを課題とする。
【解決手段】ハフ変換部14は、輝度画像データ102に対して輪郭抽出処理を実行し、輪郭画像データ103を生成する。輪郭画像データ103の各画素は0〜255の画素値を有する。ハフ変換部14は、輪郭画像データ103の各点に対してハフ変換を実行する。ハフテーブル15には、輪郭画像データ103の各点の画素値、すなわち輪郭強度の値が加算値として集計される。検出部16は、集計値に基づき、線分あるいは円弧を検出する。
(もっと読む)
画像中の物体の検出及び追跡
【課題】本開示は画像処理に関し、より詳細には画像中の物体を検出することに関する。
【解決手段】一つの開示された方法によれば、特定の物体を表す画像点の三次元空間における座標値を算定する。前記空間内のモデルを表す式を提供する。前記モデルは、一つ以上の他の物体の学習用画像のセットの特性を示す。前記画像点と前記モデルとの間の距離を算定するために前記座標値を前記式に適用する。前記算定された距離に基づいて、前記特定の物体が前記一つ以上の他の物体と一致するか否かを判定する。学習用画像セットを受け取ってもよい。前記学習用画像セットに基づいて多次元空間(例えば、固有空間)を決定してもよい。前記空間に前記学習用画像セットを投影することによって画像点のセットを生成してもよい。前記画像点セットの特性を示す前記空間内のモデルを表す式を決定してもよい。
(もっと読む)
動き検出装置
【課題】移動する測定対象物が加速、減速した場合であっても該測定対象物の速度を高精度に測定することが可能な動き検出装置を提供する。
【解決手段】撮像部11で撮像される画像の各画素に、測定対象物の測定対象物が存在した場合に、投票値を付与する。そして、積算された投票値が増加する場合には、測定対象物は減速しているものと判断し、他方、積算された投票値が減少する場合には、測定対象物は加速しているものと判断する。そして減速している場合には、特徴領域に対応する画素の投票値に、所定の補正値を加算することにより、実際の速度を反映した投票値に補正する。また、減速している場合には、特徴領域に対応する画素の投票値から所定の補正値を減算することにより、実際の速度を反映した投票値に補正する。
(もっと読む)
対象物体の検出方法、検出装置及びプログラム
【課題】対象物体を3次元の点群として計測した場合の形状データに基づいて、高速化を図りつつ精度よく対象物体を検出することの可能な検出方法を提供する。
【解決手段】3次元計測手段から3次元の計測点群として球体の形状データを取得する形状データ取得ステップ(S1)と、仮想座標空間において球体が占める対象体領域を各計測点の付加情報に従って区画する領域分割ステップ(S41)と、分割された各対象体領域の中から球体と推定される推定領域を抽出する対象体領域抽出ステップ(S43)と、推定領域毎に推定球体を生成し、対象体と認識される推定対象体を認識対象体とする対象体認識ステップ(S44)とを備える。
(もっと読む)
画像処理装置及び画像処理プログラム
【課題】文字認識処理によって文字画像ではない画像に対して文字画像であると認識された誤りを減少させるようにした画像処理装置を提供する。
【解決手段】画像処理装置の受付手段は、文字認識された文字候補画像と該文字候補画像に関する情報を受け付け、第1の判定手段は、前記受付手段によって受け付けられた文字候補画像に関する情報に基づいて、該文字候補画像が文字画像であるか否かを判定し、第2の判定手段は、前記第1の判定手段によって文字画像であると判定されなかった場合又は文字画像ではないと判定されなかった場合は、前記受付手段によって受け付けられた文字候補画像の特徴を抽出し、該文字候補画像が文字画像であるか否かを判定する。
(もっと読む)
眼球検出システムおよび眼球検出方法
【課題】ロバスト性が高く正確に対象者の眼球を検出可能な眼球検出システムを提供する。
【解決手段】本発明に係る眼球検出システム100は、ターゲット画像上での中心座標および拡大倍率を含む染色体を持つ個体の集団を生成する初期個体集団生成部120と、テンプレート画像180上の画素値と中心座標および拡大倍率によって指定されるターゲット画像上の画素値とに基づいて個体それぞれの適応度を算出する適応度演算部122と、中心座標および拡大倍率によって指定されるターゲット画像上の対象者の眼球領域198を基準として前額領域190、眉毛領域192、上眼瞼領域194または頬領域196を仮定する領域仮定部124と、これらの領域に基づいて適応度を修正した修正適応度を算出する修正適応度演算部126と、修正適応度に基づき遺伝的操作を実行する遺伝的操作実行部130と、を備えることを特徴とする。
(もっと読む)
学習装置、学習装置の制御方法、検出装置、検出装置の制御方法、およびプログラム
【課題】対象物の状態に適した重みの学習を行い、対象物の検出性能を向上する。
【解決手段】画像から対象物の一部または全部を検出して複数の検出結果を出力する複数の検出部と、複数の検出結果の少なくとも1つに基づいて対象物の状態を推定する推定部と、対象物の状態に基づいて画像を複数のグループに分類する分類部と、検出結果に基づいて、複数の検出部のそれぞれに対する重み情報をグループごとに算出する重み算出部と、を備える。
(もっと読む)
画像評価方法、描画条件選択方法、画像評価プログラム、描画条件選択プログラム
【課題】マスク上に描画されたマスクパターンをより高い精度でかつ容易に評価可能な画像評価方法及び画像評価プログラムを提供する。また、所望の図形を描画可能な描画条件を算出する描画条件選択方法及び描画条件選択プログラムを提供する。
【解決手段】画像評価方法及び画像評価プログラムは、基準図形と描画図形の面積が同一又は略同一であるか否かを判定し、両図形の輪郭線から算出された点列を主成分分析して得られる第1主成分及び第2主成分との長さの比である基準図形長短比と描画図形長短比を用いて両図形の概形が類似であるか否かを判定し、基準図形及び描画図形の概形が類似であり、かつ、その面積が同一であると判定した場合に、基準図形及び描画図形が一致すると判定するものとした。
(もっと読む)
エレベータの乗降検出装置およびエレベータ装置、並びにエレベータの乗降検出方法
【課題】かごに対する人および物体の出入りを検出して、かご容積に対する人および物体の占有率を低コストかつ高精度に算出するエレベータの乗降検出装置、検出結果に応じてエレベータを駆動するエレベータ装置、並びにエレベータの乗降検出方法を得る。
【解決手段】エレベータの出入り口に設けられ、出入り口を通過する人および物体を線状画像としてそれぞれ検出する第1、第2ラインセンサ11a、11bと、第1、第2ラインセンサ11a、11bで検出された線状画像から、人および物体の投影面積を算出する投影面積算出部131と、第1、第2ラインセンサ11a、11bで検出された線状画像から、人および物体の移動方向を判定する移動方向判定部132と、投影面積および移動方向に基づいて、エレベータのかご容積に対する人および物体の占有率を算出する占有率算出部133とを備えている。
(もっと読む)
画像処理装置、画像処理方法及び画像処理プログラム
【課題】ユーザの意図しない動作がジェスチャと誤認識されるのを防止することを課題とする。
【解決手段】画像処理装置10は、画像を取得する。さらに、画像処理装置10は、取得された画像からジェスチャを認識する対象を特徴付ける領域を抽出する。さらに、画像処理装置10は、画像のフレーム間で領域同士を対応付ける。さらに、画像処理装置10は、画像のフレーム前後で領域が移動した移動方向を抽出する。さらに、画像処理装置10は、画像のフレーム前後で領域が移動した移動距離が所定の閾値よりも大きい場合に移動方向を出力する。さらに、画像処理装置10は、閾値を超えた移動距離を用いて閾値を更新する。
(もっと読む)
画像認識装置および画像認識方法
【課題】画像から特定の幾何学的図形を構成する物体に対応する領域を精度よく抽出する装置および方法を提供する。
【解決手段】画像認識装置は、画像からエッジセグメントを抽出するエッジ抽出部と、エッジ抽出部により抽出されたエッジセグメントを利用して形成される予め決められた幾何学的な図形の候補の組合せを取得する取得部と、取得部により取得された各組合せについて、図形の候補の外周が抽出されたエッジセグメントによってカバーされる程度を表す再現率、および、抽出されたエッジセグメントが図形の候補として利用される程度を表す適合率をそれぞれ算出する算出部と、再現率および適合率に基づいて決まる評価値が最大となる組合せに含まれる図形の候補に対応する領域を抽出する画像抽出部を有する。
(もっと読む)
視線位置推定装置及び視線位置推定プログラム
【課題】画像における視線位置を好適に推定することが可能な視線位置推定装置を提供する。
【解決手段】視線位置推定装置1は、画像データから、当該画像データの複数の特徴量のそれぞれを画素値とするグレースケール画像である複数の特徴量マップを生成する特徴量マップ生成部12と、複数の特徴量マップに基づいて、顕著性マップを生成する顕著性マップ生成部13と、顕著性マップにおいて、視線位置に影響を及ぼす所定個数の注意予測を決定する注意予測決定部14と、乱数を用いて、注意予測に対する重み付けを行うとともに、重み付けされた注意予測に基づいて、視線位置を推定する視線位置推定部15と、を備える。
(もっと読む)
61 - 80 / 1,697
[ Back to top ]