
Fターム[5L096FA67]の内容
Fターム[5L096FA67]に分類される特許
21 - 40 / 1,697
直線検出装置、直線検出方法、直線検出プログラム及び撮影システム
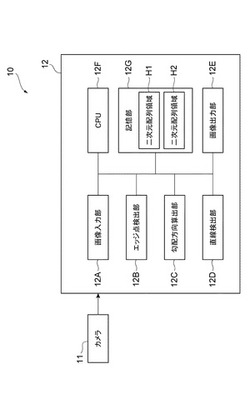
【課題】直線をより確実に検出可能な直線検出装置、直線検出方法、直線検出プログラム及び撮影システムを提供する。
【解決手段】入力画像I中のエッジ点piの勾配を算出する勾配方向算出部12Cと、エッジ点をハフ変換して直線を検出する直線検出部12Dと、ハフ変換での投票用の第1のハフ空間部H1と、ハフ変換での投票用の第2のハフ空間部H2とを備える。直線検出部は、ハフ変換する際、第1及び第2の軸によって構成される2次元座標系で、エッジ点の勾配方向と第1の軸方向とのなす角度αiと、2次元座標系の原点に対するエッジ点の方向と第1の軸(x軸)方向とのなす角度βiとの角度差が90度以上であるエッジ点を通る直線群を第1のハフ空間部に投票し、上記角度差が90度未満の場合であるエッジ点を通る直線群を第2のハフ空間部に投票し、第1及び第2のハフ空間部のそれぞれの投票結果に基づいて、入力画像中の直線を検出する。
(もっと読む)
顔方向の検出方法および情報処理機器

【課題】顔の方向を検出してディスプレイを備えるコンピュータの電力を制御する。
【解決手段】カメラ・モジュールが撮像した画像データからディスプレイの正面方向に対する顔の方向を判断する(403)。斜め顔を検出したときは、ディスプレイのバックライトをオフにする(407)。入力デバイスからの入力がある間は、正面顔を検出しない場合であってもバックライトをオフにしない(421、423)。斜め顔(405)または非顔を検出してバックライトをオフにしても(407)、入力デバイスが操作されたとき(409)はバックライトをオンにする(431)。そのとき、一定時間以上連続して正面顔を認識しない限りディスプレイのオン状態を維持する(433)。バックライトがオフになってから正面顔を検出したときはバックライトを点灯する(411)。
(もっと読む)
注目度推定装置およびそのプログラム
【課題】映像コンテンツを視聴する人物の当該コンテンツに対する注目度を計測する注目度推定装置を提供する。
【解決手段】注目度推定装置1は、モーションキャプチャで計測された人物の骨格位置から身体動作量を計測する身体動作量計測手段11と、カメラ映像から人物の瞬目間隔時間を計測する瞬目間隔計測手段13と、カメラ映像から視線変動量を計測する視線変動量計測手段14と、身体動作量、視線変動量および瞬目間隔時間のそれぞれについて、予め定めた映像区間における統計特徴量を生成する統計特徴量生成手段30と、統計特徴量と注目度との対応関係を学習データとして予め記憶した学習データ記憶手段40と、学習データに基づいて、統計特徴量生成手段30で生成された統計特徴量に対応する注目度を、当該映像区間に対する注目度として特定する注目度特定手段50と、を備えることを特徴とする。
(もっと読む)
ジェスチャ認識装置、その方法、及び、そのプログラム
【課題】指先動きに応じた動作の誤判定を軽減できるジェスチャ認識装置を提供する。
【解決手段】取得した動画像からユーザの指先位置の軌跡を検出する検出部12と、前記指先位置の軌跡から送り動作か否かの判定を行うための有効範囲を設定する設定部15と、前記指先位置の軌跡が、前記有効範囲に含まれている場合に、前記指先位置の軌跡が送り動作か否かを判定する判定部14と、前記指先位置の軌跡が前記送り動作の場合に、前記送り動作から前記ユーザのジェスチャを認識する認識部16とを有する。
(もっと読む)
画像処理装置、方法、及び画像表示装置
【課題】対象物の三次元位置を高精度で算出する。
【解決手段】実施形態の画像処理装置は、実施形態の画像処理装置は、第1取得部、第2取得部、第1設定部、第2設定部、第1算出部、及び第2算出部を備える。第1取得部は、対象物が複数の位置から撮像された複数の撮像画像を取得する。第2取得部は、前記対象物の仮三次元位置と、前記対象物の仮サイズを取得する。第1設定部は、実空間における前記仮三次元位置の近傍に少なくとも1つの探索候補点を設定する。第2設定部は、前記探索候補点を前記撮像画像に射影した射影位置毎に、前記対象物を探索するための探索窓であって、前記探索候補点の位置と前記仮サイズとに基づくサイズの前記探索窓を設定する。第1算出部は、前記探索窓内において、前記対象物が含まれるかどうかを示す評価値を算出する。第2算出部は、前記評価値に基づいて前記対象物の三次元位置を算出する。
(もっと読む)
画像処理装置、直線検出方法及びコンピュータプログラム
【課題】読み取った画像から原稿の境界を精度よく検出することが可能な画像処理装置、直線検出方法、コンピュータプログラムを提供する。
【解決手段】情報処理装置20は、入力画像からエッジ画素を抽出するエッジ画素抽出部210と、抽出したエッジ画素からハフ変換を用いて直線候補を抽出する直線候補検出部221と、直線候補から所定距離内にあるエッジ画素に対して最小二乗法を用いて直線を検出する直線検出部222と、を有する。
(もっと読む)
注視位置推定システム、注視位置推定システムの制御方法、注視位置推定装置、注視位置推定装置の制御方法、プログラム、及び情報記憶媒体
【課題】虹彩中心位置を検出したり、眼球中心の投影位置を推定したりすることなく、ユーザの注視位置を推定することが可能な注視位置推定システムを提供すること。
【解決手段】撮影部17は、表示手段に表示される画面を見るユーザの顔を撮影する。領域検出部32は、ユーザの顔領域と、ユーザの目以外の所定部位領域と、の少なくとも一方と、ユーザの目領域と、を撮影部17の撮影画像から検出する。面積/位置情報取得部60は、目領域の面積情報及び位置情報と、顔領域と所定部位領域との少なくとも一方の面積情報及び位置情報と、を取得する。注視位置推定部62は、面積/位置情報取得部60によって取得された面積情報及び位置情報に基づいて、ユーザが注視している画面内の位置を推定する。
(もっと読む)
電子的に会話を評価するための方法およびシステム
【課題】会話の解析を自動的に支援する方法および機器を提供する。
【解決手段】本発明は、少なくとも2人の人の間の会話を電子的に評価するための方法に関し、ビデオデータを受けるステップと、会話中に2人の間で視覚的な相互作用が生じたか否かを決定するためにビデオデータを解析するステップと、眼の運動方向が同じモードであるか否かを決定するために2人の眼の運動を解析するステップとを備える。
(もっと読む)
勾配推定装置、勾配推定方法、及び勾配推定プログラム
【課題】路面が他の物体に覆われていても路面の勾配を算出することができる勾配推定装置、勾配推定方法、及び勾配推定プログラムを提供する。
【解決手段】特徴点抽出部は、撮影手段が撮影した画像上の特徴点を抽出し、物体検知部は、前記撮影手段が撮影した画像から物体を表す画像を検知し、勾配算出部は、物体検知部が検知した物体を表す画像における特徴点抽出部が抽出した特徴点の座標と、特徴点の座標の予め定められた時間における移動量と、に基づいて、物体が位置する路面の勾配を算出する。
(もっと読む)
特徴量生成装置、方法及びプログラム
【課題】高い認識精度を維持しつつ特徴量の次元数を削減することができる特徴量生成装置、方法及びプログラムを提供する。
【解決手段】特徴量生成装置は、入力画像を分割し、分割された各部分領域から、例えば勾配方向をヒストグラム化した特徴量を抽出し、分割された部分領域を複数選択し、選択された部分領域を処理単位として、部分領域の位置に応じた重み付けを行い、特徴量を次元ごとに合算することにより特徴量の次元削除を行う。
(もっと読む)
ゲーム装置、ゲーム装置の制御方法、及びプログラム
【課題】プレイヤが操作対象を操作しながら操作対象以外のゲームキャラクタにも簡単に指示を与えること。
【解決手段】ゲーム装置(10)は、プレイヤが注視するゲーム画面(92)内の位置に関する注視位置情報を取得し、第1判定手段(108)は、注視位置情報とゲームキャラクタの位置とに基づいて、プレイヤがゲームキャラクタを意識しているか否かを判定する。第2判定手段(110)は、ゲームキャラクタの位置及び視線と、仮想視点(90)又はプレイヤの操作対象の位置と、に基づいて、ゲームキャラクタが仮想視点(90)又はプレイヤの操作対象を意識しているか否かを判定する。動作制御手段(112)は、第1判定手段(108)及び第2判定手段(110)の判定結果に基づいて、ゲームキャラクタに、注視位置情報に応じた動作又は所定の動作を行わせる。
(もっと読む)
画像ワープ方法及びそのコンピュータプログラム製品
【課題】画像ワープ方法及びそのコンピュータプログラム製品を提供する。
【解決手段】この画像ワープ方法は、元の視線角に対応する元の画像の複数の元の特徴点を決定するステップと、該元の画像内の該複数の元の特徴点の元の画素座標を計算するステップと、該複数の元の特徴点にそれぞれ対応する該元の画像の複数の新しい特徴点を決定するステップと、該元の画像上に射影された該複数の新しい特徴点の新しい画素座標を計算するステップと、該元の画像内の該元の特徴点の該元の画素座標をそれぞれ対応する該新しい特徴点の該新しい画素座標に近づけて、該元の画像を新しい視線角に対応する新しい画像に変形させるステップとを含む。
(もっと読む)
個体識別装置、個体識別方法、及びプログラム
【課題】 画像取り込みの際などに起きる画素のずれによって特徴点の位置がずれてしまった場合であっても、精度良く個体識別を行うことができる個体識別装置等を提供する。
【解決手段】 個体識別装置100は、抽出された特徴点群の中から特徴量算出点Aを1つ特定し(S201)、特徴量算出点Aを除いた特徴点群の中から、特徴量算出点Aから近い順に特徴点A1〜Anを特定する(S202)。次に、特徴量算出点Aから所定距離X以上離れた特徴点Ai〜Anの中で、特徴量算出点Aから最近傍の点を基準点Bとして特定し(S203)、特徴量算出点Aから所定距離X以上離れた特徴点Ai〜Anの中から、所定数j個の参照点C1〜Cjを特定する(S204)。そして、特徴量算出点A、基準点B、及び参照点C1〜Cjの3つの点を用いて、特徴量算出点ごとに特徴量を算出する。
(もっと読む)
警告表示方法および警告表示プログラム
【課題】グルーピングの枠移動を精度よく予測し、より正確に危険物の存在を車両の運転者に警告する警告表示方法および警告表示プログラムを提供する。
【解決手段】警告表示方法は撮像した車両周囲の画像から特徴量を検出するステップと、検出した特徴量にもとづいて、同一の属性を持つ特徴量をグルーピングするステップと、グルーピングされた画像領域に含まれる物体画像の車両に対する危険度を示す信用度を設定するステップと、信用度が所定の高さ以上であると、運転者が視認可能な位置に設けられた表示装置に対して警告表示を行うステップと、グルーピングされた画像領域の次フレームにおける位置を、グルーピングされた画像領域を構成する画素の2フレーム前の画像と1フレーム前の画像間の動きベクトルの平均と1フレーム前の画像と現在のフレームの画像間の動きベクトルの平均とにもとづいて算出した加速度を用いて予測するステップとを有する。
(もっと読む)
動きベクトル算出装置
【課題】映像信号の動きベクトル算出のための演算量を著しく低減するとともに、固定小数点処理をし易くする。
【解決手段】動画像の画像ブロック毎の動きベクトルを算出するために、3次元で定義された一〜三番目の固有値λ1〜λ3のうち、固有値λ1,λ2は近似する静止画の固有値λ'1,λ'2を代用することで、2次固定方程式で求め、精度を必要とする固有値λ3は、通常の分散式で求めている。このように、3次固定方程式を用いることなく動きベクトルを求めることで、演算量を少なくして時間内の処理と動きベクトルの算出精度を向上させることが可能となる。
(もっと読む)
画像検索に適した特徴ベクトルを抽出するプログラム、方法及び画像検索装置
【課題】画像検索の際に、比較すべき画像に回転及びスケールの違いがあっても高い検索精度で、少ない計算資源で実行することができる特徴点の特徴ベクトルを抽出する。
【解決手段】m個の特徴点集合について、特徴ベクトルの抽出対象となる注目特徴点p0からk1番目に近傍の特徴点qを選択し(S1)、直線p0−qの距離rを導出し(S2)、p0を中心とし且つ距離rを半径とした円周から、所定長の近傍に含まれる1つ以上の特徴点集合Bを導出し(S3)、p0とBの各特徴点bとについて、角度が一定となるように回転させて、m個全ての特徴点を用いて、p0の特徴ベクトルfを算出する(S4)。
(もっと読む)
映像処理方法及び装置
【課題】深さ情報のみを用いて被写体を検出するに当たって、演算処理速度を高める。
【解決手段】映像処理方法は、映像の深さ情報を獲得するステップと、前記映像から目標物が存在する領域に対する第1関心領域を分離するステップと、前記第1関心領域から目標物に対する候補領域を検出するステップと、前記検出された候補領域が目標物に対応するか否かを判断するステップと、前記候補領域が目標物に対応する場合、前記候補領域を用いて目標領域を検出するステップと、前記検出した目標領域を用いて目標物の姿勢を推定するステップと、前記目標物をモデリングするステップと、を含む。
(もっと読む)
直線検出装置、直線検出方法、直線検出プログラム及び撮影システム
【課題】 直線をより確実に検出可能な直線検出装置、直線検出方法、直線検出プログラム及び撮影システムを提供する。
【解決手段】 直線検出装置30は、撮像手段20で撮像された撮影画像22内のエッジ点23について、撮影画像に基づく球面画像40内の各エッジ点の対応点である対応エッジ点の球面勾配ベクトルを算出する勾配算出部34と、球面画像における直線投影面60の法線ベクトルnを表す極角θ及び方位角φで構成されるハフ空間70に、各対応エッジ点を含む直線投影面の法線ベクトルを投票する投票部35と、所定の閾値以上の投票数を有する法線ベクトルで規定される直線投影面を決定することで、撮影画像内の直線を特定する直線特定部36とを備える。投票部は、各対応委エッジ点の位置ベクトルと直交する法線ベクトルであって、法線ベクトルと対応エッジ点における球面勾配ベクトルとの内積が0より大きい法線ベクトルを投票する。
(もっと読む)
視線分析装置、視線計測システム、方法、プログラム、記録媒体
【課題】本発明の課題は、被験者の視線を推定・追跡することで、評価対象印刷物の掲載情報または陳列棚の商品の注目度を分析評価するシステムを提供することである。
【解決手段】
メガネを通して見るシーン画像とシーン画像上の注視点座標を視線分析装置に送信する視線追跡メガネと、基準画像および基準画像の分割画像の、特徴点の座標と特徴量を記憶する手段と、視線追跡メガネからシーン画像と注視点座標を受信する手段と、シーン画像の特徴点の特徴量と分割画像の特徴点の特徴量とに基づき最も類似度評価の高い特徴点を組み合せる手段と、最も多い組合せ個数を持つ分割画像の特徴点の座標とシーン画像の特徴点の座標に基づいて座標変換行列を算出する手段と、座標変換行列とシーン画像上の注視点座標から算出した分割画像上の注視点座標を、基準画像に変換して注視点マークを合成する手段と、を備える視線分析装置と、特徴とする視線計測システムである。
(もっと読む)
画像認識システムおよび画像認識方法
【課題】ネットワーク型画像認識システムのレスポンスを向上させる。
【解決手段】端末装置が取得した画像をサーバにおいて認識する画像認識システムであって、端末装置は、入力画像から加工画像を生成する画像処理部と、画像処理部によって生成される加工画像を前記サーバへ送信する通信部と、を有する。サーバは、端末装置から受信する加工画像に対して認識処理を行う認識部と、認識部による認識処理において不足している情報を判断する不足情報判断部と、端末装置に対して不足情報判断部による判断結果に対応する画像を要求する要求部と、を有する。画像処理部は、サーバからの要求に基づいて、入力画像から加工画像を生成する。
(もっと読む)
21 - 40 / 1,697
[ Back to top ]