
Fターム[5L096HA01]の内容
Fターム[5L096HA01]の下位に属するFターム
動画像解析 (3,285)
Fターム[5L096HA01]に分類される特許
101 - 120 / 183
移動物体の追従装置及び同装置を備えた電動車椅子

【課題】 移動物体の追従装置は種々あるが、距離を計測するための方法として2台のカメラを用いたり、超音波センサを用いており、コスト高となり、又データ処理のアルゴリズムが複雑となる。
【解決手段】 一つの撮像装置(単眼)を用いることに最大の特徴があり、物体の撮像手段と、上記撮像手段により得られた画像情報を記憶する画像情報記憶手段と、上記画像情報記憶手段に蓄えられた画像情報より追従対象となる移動物体の追従対象領域を抽出する対象領域抽出手段と、上記対象領域抽出手段により得られた画像情報より上記移動物体に固有の特徴量を計測する特徴量計測手段と、上記特徴量計測手段の出力と上記画像情報より予め取りこまれた参照特徴量の値を比較する特徴量比較手段と、上記特徴量比較手段の出力により移動方向又は移動速度を決定する駆動信号発生手段と、上記駆動信号発生手段の出力により制御される駆動手段とを備えることにより解決できた。
(もっと読む)
顔画像登録装置、顔画像登録方法、顔画像登録プログラム、および記録媒体

【課題】ユーザに手間を掛けさせることなく、認証処理に利用できるさまざまな顔画像を辞書に登録する。
【解決手段】シーン抽出部11は、入力された動画像から、少なくとも一人の顔画像が連続して撮影されているシーンを抽出する。代表顔画像抽出部12は、抽出されたシーンから、正面を向いた顔の画像を抽出する。登録用顔画像抽出部13は、抽出された正面顔画像の表す人物についての他の顔画像のうち、ピックアップ条件に一致する各種の登録用顔画像をシーンから抽出する。顔画像登録部14は、抽出された代表顔画像と、抽出された登録用顔画像とを、互いに関連付けて顔画像辞書15に登録する。
(もっと読む)
覚醒度推定装置
【課題】覚醒度推定装置において、覚醒度の判定結果とともに、眼の開度の検出に関する信頼度の判定結果を提示することができるものとする。
【解決手段】画像に含まれる眼の開度を検出する眼開度検出手段101と、時系列的に連なる複数の画像を対象として、眼開度検出手段101により検出された眼の開度の時系列的推移を検出する眼開度推移検出手段104と、眼開度推移検出手段104により検出された眼の開度の時系列的推移に基づいて覚醒度を判定する覚醒度判定手段105と、眼開度推移検出手段104により検出された眼の開度の時系列的推移に基づいて、眼開度検出手段101による眼の開度の検出結果に対する信頼度を判定する信頼度判定手段106と、を備える。
(もっと読む)
対象物位置追跡方法、装置、およびプログラム
【課題】類似色物体の誤認識を減らす、認識率を高めた対象物位置追跡方法を提供する。
【解決手段】肌色確率分布計算部14は撮像部11で撮像された各フレームの撮像画像を入力し、肌色が存在する確率の計算式または、画素値と該確率との関係を表わすルックアップテーブルを用いて、指定された矩形領域内での肌色の確率分布を計算する。矩形領域決定部15は、確率分布の重心を中心とし、確率分布値の総和と確率分布の最大値の関数で幅と高さが与えられる矩形領域を決定する。肌色領域判定部16は前ループで決定された矩形領域と今回決定された矩形領域との大きさの差分が閾値以内、または同一フレームに対し指定ループ回数以上の矩形領域の決定を行った、または矩形領域の大きさが指定サイズを超えた場合に、その矩形領域を現フレームでの前記部位の追跡結果とし、次フレームの計算に移る。
(もっと読む)
障害物検知システム
【課題】車速センサや舵角センサの検出誤差に起因する障害物の誤検知を排除し、単眼カメラによる立体物検知をより高精度に行う。
【解決手段】車両に搭載されたカメラで撮像された路面を含む第1の画像の上面図と、前記第1の画像とは異なるタイミングで撮像された第2の画像の上面図とを作成し、上記二枚の上面図を路面上の特徴的形状に基づいて対応させ、上記二枚の上面図の重複部分において差異が生じた領域を障害物と認識する。
(もっと読む)
居眠り判定装置および居眠り運転警告装置
【課題】本発明は、居眠り判定装置に係り、顔内部位の位置変化に基づく運転者の居眠り判定を車両の走行状態に対応させて適切に行うことにある。
【解決手段】顔向きカメラにより撮影される運転者の顔の画像データから該運転者の顔左右両端位置及び顔上下位置のそれぞれの移動量を検出する。また、ナビゲーションECUからの情報に基づいて自車両の走行する道路が直進路であるかカーブ路であるかを判定する。カーブ路走行時は、直進路走行時に比べて、運転者の顔左右両端位置についての居眠り確度Paを算出するうえでの閾値aを多めに設定し、また、その顔左右両端位置についての重み付け係数Aを大きめに設定する。そして、それらの閾値aと重み付け係数Aとを用いて居眠り判定の信頼度Tを算出し、その信頼度Tに基づいて運転者の居眠りを判定する。
(もっと読む)
X線撮像装置
【課題】高画質の長尺状X線撮影画像を確実に撮影する。
【解決手段】この発明の装置は、X線管1により被検体Mに照射されるコーン状X線ビームXAの照射区域の重なりに応じて撮影視野が重複する重複画像領域が2枚目以降のX線撮影画像に生じると共に、X線撮影画像を重複画像領域については画素信号の加算平均化処理を行って結合し長尺状X線撮影画像が仕上げられるので、長尺状X線撮影画像の画質向上が図れる。加えて、X線画像結合部13によるX線撮影画像の結合の際、X線撮影画像の重複画像領域において画像が類似していないと画像類似判定部12で判定された低画質の分割画像領域は除かれるので、低画質の分割画像領域に起因する長尺状X線撮影画像の画質の低下を回避できる結果、高画質の長尺状X線撮影画像を確実に撮影できる。
(もっと読む)
画像処理装置および方法、並びにプログラム
【課題】より確実に顔画像認証を行う。
【解決手段】抽出部82は、撮像部81において撮像された被認証者の顔画像の顔画像データから、特徴量を抽出し、認証部86に供給する。抽出部84は、顔画像メモリ83に記録されている、過去に撮像された被認証者の顔画像の顔画像データから特徴量を抽出し、推定部85に供給する。推定部85は、抽出部84から供給された特徴量に基づいて、撮像部81において撮像された顔画像の特徴量が分布すると推定される推定分布範囲を求め、認証部86に供給する。認証部86は、抽出部82から供給された特徴量が、推定分布範囲内の値であるか否かを判定する。本発明は、顔画像認証を行う画像処理装置に適用することができる。
(もっと読む)
画像選択方法および画像選択装置
【課題】被写体の変形を効率良く、高精度に表現可能な画像を代表画像として選択することができる画像選択方法を提供する。
【解決手段】時系列に並んだ複数の画像から2枚以上の代表画像を選択する画像選択方法であって、変形する被写体を含む時系列に並べられた複数の画像の入力を受け付けるステップ(S301)と、各時刻における画像中の前記被写体のシルエットの輪郭線上に設けられた複数の代表点における特徴量をもとに特徴量ベクトルを抽出するステップ(S302〜S305)と、複数の画像に対応する特徴量ベクトルから、当該特徴量ベクトル同士の独立性を判断するステップ(S306)と、前記独立性に基づいて、前記複数の画像から2枚以上の代表画像を選択するステップ(S307)とを含む。
(もっと読む)
駐車支援システム
【課題】ユーザが自車両を後退させて駐車させる場合の使い勝手を高める。
【解決手段】駐車支援システム1は、前方駐車車両の後端ラインや後方駐車車両の前端ラインの検出に成功すると、その検出に成功した前方駐車車両の後端ラインや後方駐車車両の前端ラインを基準として、つまり、静止状態にある駐車車両を基準として自車両が駐車するのに必要なスペースを表す駐車必要スペースマーカを合成鳥瞰画像に重畳して表示する。ユーザは、駐車必要スペースマーカが前方障害物及び後方駐車車両の双方に重ならずに十分に余裕をもって表示されていれば、自車両を前方駐車車両と後方駐車車両との間に駐車させることが可能であると判断できる。
(もっと読む)
動作指示装置
【課題】ユーザのプライバシーを確保しながら、ユーザの負担を軽減することができるとともに、ユーザに的確な指示を与えることができる動作指示装置を提供する。
【解決手段】プロジェクタ11は、ユーザに対して複数のスポット赤外光を投影し、ビデオカメラ21a,21bは、ユーザの表面に投影された複数の赤外光点を撮影し、3次元位置検出部22及び3次元位置復元部23は、撮影された複数の赤外光点の位置を基にユーザの表面の3次元位置分布を検出し、姿勢推定部24は、検出された3次元位置分布と、分布データベース25に記憶されている基準3次元位置分布とを比較してユーザの姿勢を推定し、動作推定部30は、推定された姿勢と、動作データベース31に記憶されている姿勢とを比較してユーザの動作を推定し、音声出力及び映像表示部32は、動作指示情報データベース33を参照して、推定された動作の次に行うべき動作に関する指示をユーザに提示する。
(もっと読む)
モデリング装置およびカメラパラメータの計算方法
【課題】 本発明の課題は、デジタルカメラで手軽にデータどりができ、撮影時に対象物のデータ欠如があってもモデリングが可能な3次元モデリング装置を提供することにある。
【解決手段】 本発明のモデリング装置は、カメラ1のカメラパラメータを取得する第1の手段2eと、複数の写真画像に撮影された円柱の稜線を指定するための稜線指定手段2dと、複数の写真画像に撮影された1つの円柱に対して稜線指定手段2dによって指定された3本以上の稜線上の点から、該円柱に対応した既算出のパラメータから作成した仮想上の円柱を前記複数の写真画像に射影した稜線上の対応点までの距離の積算値が最小になる条件より、前記複数の写真画像を撮影したカメラ1のカメラパラメータおよび前記撮影された円柱をモデリングするための円柱パラメータを算出し、該カメラパラメータおよび円柱パラメータを用いて3次元の円柱モデルを生成するモデル生成手段2e、2fとを備える。
(もっと読む)
表情訓練器
【課題】セミナや研修で行われている表情訓練と同等以上の効果を、ディジタル画像処理技術を用いた機械との対話で行う方法の具体化が課題である。
【解決手段】上記課題を解決するため、表情訓練器を訓練生の顔を撮影するディジタルカメラと、前記カメラにより撮影した顔写真から手本となる顔写真を創出するソフトウエアと、前記顔写真等を表示する装置と、手本となる顔写真を見ながら作った顔との差異を定量化し訓練生にフィードバックするソフトウエアと、前記ディジタルカメラやソフトウエアの作動を指示する操作部から構成した。
(もっと読む)
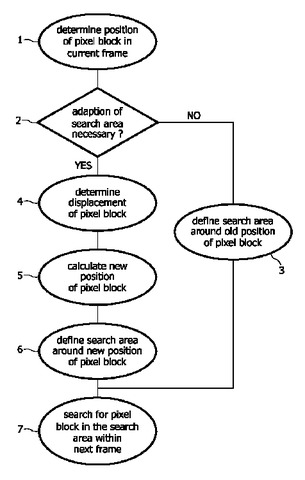
物体又は人物の動きを追跡する方法及び装置
本発明は、物体又は人物の動きを追跡する方法、装置及びコンピュータプログラムに関する。電子的なビデオフレームにより人物又は物体の動きを追跡することは慣習的であるが、人物又は物体がその移動の速度において突然の著しい変化を受ける場合には追跡することができない。提案される方法は、デジタルビデオフレームの系列を捕捉し、これにより物体又は人物を捕捉する第一のステップを含む。同時に、パラメータの測定値が取得され、前記測定値は、デジタルビデオフレームにより追跡される物体又は人物の動きを示す。次のステップでは、ビデオフレームは処理ロジックにより処理され、処理ロジックは、ブロックマッチングアルゴリズムを使用する。前記ブロックマッチングアルゴリズムは、フレームにおける画素ブロックを定義し、この画素ブロックを次のフレーム内のサーチエリア内でサーチし、次のフレーム内のサーチエリアの位置は、測定値に基づいて動的に調整される。本発明は、ブロックマッチングアルゴリズムによりデジタルビデオフレームの電子的な処理は、追跡される物体又は人物の速度における大きな変化があるケースでさえ実行することができる。
 (もっと読む)
(もっと読む)
テロップ検出装置及び方法並びにレコーダ
【課題】 映像内のテロップを高精度で検出することができるテロップ検出装置及び方法並びにレコーダを提供する。
【解決手段】
入力映像信号の今回のフレームの映像信号から抽出されたエッジ画像データと少なくとも前回のフレームの映像信号から抽出されたエッジ画像データとの重複部分を静止エッジ画像データとして検出し、静止エッジ画像データが所定のフレーム数以上に亘ってほぼ同一の内容で継続したと判定したとき、その静止エッジ画像データが示すエッジの密集度に応じてテロップ領域を判定する。
(もっと読む)
パターン認識方法及び装置及びプログラム
【課題】 学習データの各々について正解を入力すること、時系列データにおいて、検出したい部分を入力することを不要とし、簡易な入力でパターン認識を可能にする。
【解決手段】 本発明は、記憶手段から学習用データを読み込んで、学習用データの複数の特徴を抽出し、複数の特徴から暫定的な特徴の組み合わせを決定し、全ての暫定的な特徴の組み合わせについてクラスタリングを行い、ユーザから入力された学習データ中に含まれる検索対象の数(以下、含有数と記す)を取得し、該含有数に応じた取得したクラスタリング結果を検索結果の候補として該ユーザが閲覧可能な表示装置に提示し、ユーザから選択された検索結果の候補となる特徴量の組み合わせを求め、特徴量を決定し、決定された特徴量に基づいて、検索対象データ記憶手段を検索し、検索結果を取得する。
(もっと読む)
対象物認識装置
【課題】 少ない演算量で対象物の位置を認識する。
【解決手段】 対象物認識装置において、第1分割部110aはおよび第2分割部110bは、画像を複数の領域に分割する。第1演算部120aおよび第2演算部120bは、分割した領域を単位にして特徴量を導出する。第1比較部130aおよび第2比較部130bは、導出した特徴量を少なくとも2枚の画像間において領域を単位にして比較する。認識部140は、比較の結果をもとに、対象物が位置する領域を認識する。
(もっと読む)
固有空間を用いた動体の動作判別方法
【課題】 処理するデータの量が少なく、しかも、対象動体の動作を任意方向から判別可能な固有空間を用いた動体の動作判別方法を提供する。
【解決手段】 予め動体の基本動作の各フレーム画像データAが点で表示される固有空間データAを基本動作毎に作成し、判別しようとする対象動体の各フレーム画像データBが点で表示された固有空間データBと基本動作毎の前記固有空間データAとを比較して、固有空間データBからの距離が最も近い固有空間データAを選び、対象動体の動作を判別する固有空間を用いた動体の動作判別方法であって、基本動作毎の各フレーム画像データAは、疑似人モデルに基本動作を行わせ、基本動作を行う疑似人モデルを仮想カメラ群を用いて多方向から観察した動作画像から得る。
(もっと読む)
振れベクトル検出装置、カメラシステム、振れベクトル検出方法、及び振れベクトル検出プログラム
【課題】動画撮影時において振れベクトルを効率よく検出することができる振れベクトル検出装置、カメラシステム、動きベクトル検出方法、及び動きベクトル検出プログラムを提供すること。
【解決手段】振れベクトル検出の際に、入力された現画像データを入力画像分割部21において複数の領域に分割し、分割されて得られた分割領域毎に、動きベクトル検出難易度評価部22において動きベクトル検出の難易度を判定する。動きベクトル検出難易度評価部22で得られたベクトル検出評価値と位置重み付けメモリ24に設定された位置の重み付けとから、検出領域決定部23において、動きベクトルを検出する分割領域を選択する。動きベクトル検出部26は、検出領域決定部23で選択された分割領域毎に動きベクトルを検出する。
(もっと読む)
自走式監視装置およびそのプログラム
【課題】固定カメラでは、監視対象を再検知するまでの時間がかかったり、正確に距離や方向を出すためにマーカを移動する対象に設置する必要があるという課題を有していた。
【解決手段】走行手段103と、制御手段102と、カメラ106と、撮影される画像から画像処理により動体を検知するための動体検知手段107と、検知した動体の画像領域の重心または中心から動体の中心を決定する動体中心決定手段108を備え、動体検知時には動体中心決定手段108が決定した中心が予め決められた画像枠内に入るよう走行手段103を制御することで、固定カメラではカバーしきれない監視範囲もカバーし、監視したい場所を容易に変更できるもので、正確に距離や方向を出さなくとも簡易的な方法で動体に追跡し、検知していた監視対象を見失っても短時間で再検知できる自走式監視装置を提供できる。
(もっと読む)
101 - 120 / 183
[ Back to top ]