
Fターム[5L096HA01]の内容
Fターム[5L096HA01]の下位に属するFターム
動画像解析 (3,285)
Fターム[5L096HA01]に分類される特許
41 - 60 / 183
動き検出装置
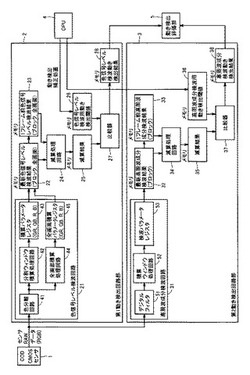
【課題】動き検出の精度を向上させることが可能な動き検出装置を提供すること。
【解決手段】色分離回路41は、入力された映像のRGBデータを色信号に分離する。分割ウィンドウ積算処理回路42は、画面全体を分割した複数のウィンドウのそれぞれに対して色信号レベル検波を行ない、積算パラメータを算出する。減算処理回路24は、分割ウィンドウ積算処理回路42によって算出されたウィンドウごとの積算パラメータの中から、指定されたウィンドウの積算パラメータについて、最新フレームの積算パラメータと1フレーム前の積算パラメータとの減算を行なう。そして、比較器27は、減算処理回路24による減算結果と予め定められた閾値とを比較し、指定されたウィンドウごとに動きがあるか否かを判定する。したがって、動き検出の精度を向上させることが可能となる。
(もっと読む)
局所的学習のためのトレーニング点の近傍を選択するための方法

【課題】局所的な教師あり学習に関し、いずれのトレーニング点が近傍に属するかを求めるための方法を提供する。
【解決手段】トレーニング点のセットから、或るクエリポイントの近くのトレーニング点のサブセットを選択するための方法であって、トレーニング点のセット、クエリポイントを与えるステップと、累積類似度が最大にされるように、トレーニング点のセットから、前記クエリポイントの近くのトレーニング点のサブセットを求めるステップと、を含み、前記累積類似度は、前記クエリポイントと前記サブセット内の各点との類似度、及び前記サブセット内の点の互いの類似度を評価し、前記与えるステップ及び前記求めるステップはプロセッサにおいて実行される。
(もっと読む)
改善された画像マッチングのための方法および構成
複数の画像(画像1,画像2)の間の少なくとも1組のマッチする属性(ピクセル,オブジェクト)を決定するための一方法は、前記複数の画像のうちの少なくとも一部分を複数の3−D投影された画像(画像1_3D,画像2_3D)をもたらす3次元空間へと投影するステップと、複数の3−D投影された画像のうちの3D投影された画像の内部の少なくとも1つの対応する組の要素を検索するステップと、複数の元の画像の内部の前記対応する要素を計算して戻し、また前記元の画像の内部の前記対応する要素を前記少なくとも1組のマッチした属性として提供するステップとを含む。  (もっと読む)
(もっと読む)
車線境界全般を検出する方法およびシステム
【課題】 車線区分線や道路境界などの路面標識が連続的でない場合、湾曲している場合、そのサイズが既知でない場合などにおいても、極端に大きな計算能力を必要とすることなく、効率的に路面標識を検出する方法、装置およびシステムを提供する。
【解決手段】 イメージャ(1)から、車両(2)の前方の道路(4)の画像(3)を受けるステップと、画像中に識別された道路内に、関心領域を決定するステップと、関心領域内に車線区分線(7L、7R)を検出することによって、また車線区分線を検出することができなかった場合には、関心領域内に道路境界を検出することによって、路面標識(8L、8R)を検出するステップとを含んでいる。ウィンカがオンの場合には、前記各ステップをスキップする。
(もっと読む)
少なくとも1つの画像及び画像群を表現する方法、画像及び/又は画像群を比較する方法、画像又は画像群を符号化する方法、画像又は画像シーケンスを復号する方法、符号化されたデータの使用、装置、コンピュータプログラム、システム、及びコンピュータ読み取り可能な記憶媒体
【課題】所与の画像に類似している一組の画像から画像を検索するため、又はデジタルビデオ中のフレームの切れ目(例えばショット遷移又は照明及び他の効果)を検出するために、画像間の類似性を評価する方法を提供する。
【解決手段】画像を表現及び解析する方法は、1つ又は複数のスケールで、且つ1つ又は複数のカラーチャネルについて画像の複数の記述子を生成することであって、当該記述子は、領域内の色内容及び色相関の情報を取得する、記述子を生成することと、記述子をスケール、カラーチャネル、特徴部の意味、及び領域等の特性に基づいて複数の方法で関連付けることと、画像の類似性を評価するためにこのような画像表現を比較することとを含む。
(もっと読む)
階層マスク生成装置、フレーム補間処理装置
【課題】 高精度で高い演算速度の探索を行う。
【解決手段】 ブロック設定手段511は、代表ブロック座標について、大きさの異なるブロックを設定する。探索範囲候補特定手段521は、前記異なる大きさのブロック毎に第n+αフレームの探索範囲を探索範囲候補として特定する。相対割合演算手段523は、前記代表ブロック座標で特定される第nフレームのブロック内における移動オブジェクトの占める相対割合を演算するとともに、対応する前記第n+αフレームについて、前記各探索範囲候補の探索範囲内における移動オブジェクトの占める相対割合を演算する。決定手段525は、前記相対割合が大きなブロックに対応する探索範囲候補を、前記代表ブロック座標で特定されるブロック探索範囲として決定する。
(もっと読む)
2つの医用画像を位置合わせするための装置および方法
本発明の実施形態は、2つの医用画像を互いに位置合わせする方法および装置を提供する。患者または母集団の生体臓器の表示を含む第1の医用画像を入手し、第1の医用画像内で臓器の表面を識別する。次に、識別された表面を用いて、臓器の3D幾何学的表面モデルを構築する。幾何学的モデルを用いて、臓器の物理的な材料特性に関する情報、および臓器を移動および変形させる外力を取り入れる動きモデルを得る。患者(または、第1の医用画像が解剖画像の場合は別の患者)の臓器の表示を含む第2の医用画像を得て、幾何学的モデルから得られた臓器表面の第1の表面法線ベクトル場と、第2の医用画像をフィルタにかけて得られた臓器表面の第2の表面法線ベクトル場との間の整列を決定する。この整列によって、幾何学的モデルの変形が、動きモデルによって予測された動きに従って調整される。その結果、第1および第2の医用画像を、決定したモデル対画像ベクトル整列(MIVA)に従って、互いに位置合わせすることができる。  (もっと読む)
(もっと読む)
背景画像推定に基づく物体検出方法及び物体検出装置
【課題】容易かつ低コストに移動物体の形状を検出でき、これによって移動物体の動作や挙動の認識も可能な背景画像推定に基づく物体検出方法及び物体検出装置を提供する。
【解決手段】徐行移動可能な1つの画像入力手段を用い、予め設定した時間間隔で撮影された複数の画像フレームFi−1、Fiの背景画像10から、移動物体画像11を検出する物体検出方法及び物体検出装置であって、背景画像推定手段により、画像フレームFiを構成する画素12ごとに、画像フレームFi−1を用いて画像フレームFiを構成する画素12の濃度値の正規分布を求め、画像フレームFiの各画素12の濃度値とその正規分布との比較から背景画像10を推定し、移動物体画像11を得る。
(もっと読む)
街路環境内の3Dモデルを評価するための方法及び装置
【課題】 立体センサ技術を使用して街路環境内の3D−モデルを評価するための方法を提供する。
【解決手段】 この方法では、含まれたセンサは対で配置されている。本発明はまた、立体センサ技術を使用して街路環境内の3D−モデルを評価するための装置に関し、それはブラケット(33)上に取り付けられた少なくとも一対のセンサ(16,17,18)を含み、センサの各対は共通面内に位置されている。本発明は、困難なコントラスト条件下の立体効果を測定する問題を解決する。また、本発明によれば、含まれた各対のセンサが、画像面内のコントラストの低レベルが避けられるようにコントラスト情報に基づいて位置される方法が提案される。含まれた対のセンサ(16,17,18)が、センサ対(16,17,18)のセンサ(16a,16b,17a,17b,18a,18b)が互いから離れて水平に位置され、センサの一方がブラケット(33)の水平面の上に、他方が水平面(22)の下に位置されるようにブラケット(33)の本質的に水平な面(22)に対して相互に位置されることを含む装置が提案される。
(もっと読む)
動作検出方法、コンピューター読み取り可能な媒体およびフレームのシーケンスを処理するシステム
【課題】フレーム間動作の検出を迅速かつ正確に実行する方法を提供すること。
【解決手段】フレームのシーケンスで描かれる動作を検出する方法およびシステムが開示
され、描かれた動作の方向および速度を推定するステップを含む。これは、第1範囲の速
度を評価するステップおよび第1範囲の速度において充分に信頼できる速度推定が見出さ
れない場合第2範囲の速度を評価するステップを含む。
(もっと読む)
車載カメラシステム
【課題】 カーナビゲーションシステムに対し、口形の変形量から識別される目的地を示す言葉を送信可能な車載カメラシステムを提供する。
【解決手段】 車内に着座する人物を撮像する撮像部6,8と、前記撮像部6,8により撮像される前記人物の口形及び前記口形の変形量を検出する検出部20と、前記検出部20の検出結果から前記人物の発した言葉を識別する識別部20と、前記識別部20の識別結果をカーナビゲーションシステムに対して送信する送信部22とを備える。
(もっと読む)
特徴区間判定装置、特徴区間判定方法、およびプログラム
【課題】カメラ動作の速度に依存せずに、画像の特徴区間を適切に判定可能な、特徴区間判定装置、特徴区間判定方法、およびプログラムを提供する。
【解決手段】画像における所定の分割領域の時系列データから画像の動き量aを算定する動き量算定部111と、画像の時系列データから画像の特徴区間を判定するための判定区間Laを設定する判定区間設定部113と、判定区間の特性に応じて、画像の特徴区間を判定するための判定基準Taを適応的に設定する判定基準設定部115と、判定区間内における画像の動き量を判定基準と比較し、判定区間が画像の特徴区間であるかを判定する特徴区間判定部117と、を備える。これにより、判定区間の特性に応じて判定基準を適応的に設定し、動き量と比較して判定区間が特徴区間であるかを判定するので、カメラ動作の速度に依存せずに、画像の特徴区間を適切に判定することができる。
(もっと読む)
人物検出装置、人物検出方法、及び人物検出プログラム
【課題】顔検出フィルタと人体検出フィルタの使い分けを行うことにより、高速かつ高精度な人物検出装置を提供する。
【解決手段】撮像手段24により撮影された映像に含まれる人物を検出する人物検出装置において、前記映像に含まれる時系列の各画像のうち、所定の画像から所定以下の大きさを有する1又は複数の人物に対する人体領域を検出する人体検出手段14と、前記所定の画像から所定以上の大きさを有する1又は複数の顔領域を検出する顔検出手段15と、前記人体検出手段及び顔検出手段により得られる検出結果に基づいて、複数の画像に含まれる人物に対する同定処理を行う同定手段17と、を有する。
(もっと読む)
移動方向検出装置、移動方向検出方法及びプログラム
【課題】移動体の移動方向を迅速に検出する。
【解決手段】比較的高速なシャッター速度で撮像したデジタル画像P1に含まれる移動体40の画像のエッジにほぼ一致する直線を規定する。次に、比較的低速なシャッター速度で撮像したデジタル画像P2に含まれる移動体40の画像のエッジにほぼ一致する直線を規定する。次に、デジタル画像P2上に規定された直線のうち、デジタル画像P1上の直線と相関のない直線を抽出する。次に、抽出された直線に沿った方向が移動体の移動方向と判定する。これにより、処理に長時間を要するテンプレートマッチング処理等を行う必要がなくなり、迅速に移動体の移動方向を検出することができる。
(もっと読む)
動き推定システムにおいてモーメント及び加速度ベクトルを使用するオブジェクト追跡
ビデオ画像シーケンスにおける動き推定方法及び装置が提供される。この方法は、a)ビデオ画像シーケンスの各フィールド又はフレームを複数のブロックへと細分化し、b)各ビデオフィールド又はフレームの各ブロックに候補動きベクトルの各セットを指定し、c)現在ビデオフィールド又はフレームの各ブロックに対して、その各々の候補動きベクトルのどれが手前のビデオフィールド又はフレームのブロックとの最良の一致を生じるか決定し、d)各ブロックに対してこのようにして決定された最良一致ベクトルを使用して現在ビデオフィールド又はフレームの動きベクトルフィールドを形成し、e)候補動きベクトルから導出された距離だけオフセットされたブロック位置において最良一致ベクトルから導出された候補動きベクトルを記憶することにより更に別の動きベクトルフィールドを形成することを含む。更に、現在ビデオフィールド又はフレームに続くビデオフィールド又はフレームに対して段階a)ないしe)を繰り返す。段階b)において後続ビデオフィールド又はフレームのブロックに指定される候補動きベクトルのセットは、段階e)において現在ビデオフィールド又はフレームの間にそのブロック位置に記憶された候補を含む。この方法は、ブロック又はタイルベースの動き推定器が実世界のオブジェクトの物理的な振舞いから導出された真の動きベクトル候補を導入することによりその精度を改善できるようにする。 (もっと読む)
道路領域推定装置及びプログラム
【課題】道路形状が1つの平面で表せない場合や、道路領域の輝度分布が大きく変化する場合であっても、画像上での道路領域を精度よく推定する。
【解決手段】撮像装置12によって、異なる位置姿勢で第1の画像及び第2の画像を撮像する。第1の画像及び第2の画像に基づいて、平面領域検出部36による道路候補領域を含む平面領域の検出と、同一領域検出部40による道路の候補領域を含む同一領域の検出とを、相互に検出結果を利用して繰り返し行う。道路領域推定部42によって、平面領域検出部36によって繰り返し行なわれた検出により得られた検出結果、及び同一領域検出部40によって繰り返し行なわれた検出により得られた検出結果に基づいて、道路領域を推定する。
(もっと読む)
画像処理装置、方法及びプログラム
【課題】顔認識において、なりすましを正しく検出可能な画像処理技術を提供する。
【解決手段】取得部51は、撮影された認証対象の画像を時系列に取得して、隣接フレームを抽出する。設定部52は、隣接フレームのそれぞれについて、顔領域と背景領域とを設定する。対応付け部53は、顔領域と背景領域とのそれぞれにおいて、隣接フレーム間の各画素の対応付けを行う。算出部54は、顔領域と背景領域とのそれぞれにおいて、動き特徴量を算出する。判定部55は、顔領域における動き特徴量と背景領域における動き特徴量とを比較して、認証対象が写真であるか人間であるかを判定する。
(もっと読む)
映像処理装置及び映像表示装置
【課題】
動き補償法によるフレームレート変換において、1画面中に複数の動きを伴うような画
像や、複数の動物体が交差するような動きを伴う場合等でも高精度に動きベクトルを検出
して映像の破綻を抑制したフレームレート変換を行う。
【解決手段】
本発明に係る映像処理装置は、2以上のフレームを用いて物体の動き情報を検出する動
きベクトル検出部と、前記動きベクトル検出部によって得られる動きベクトルに応じて、
水平・垂直方向、且つ時間方向の補間を行う補間フレーム生成部と、前記フレーム間の動
きの特徴を検出する動き特徴検出部とを備える。そして、前記動き特徴検出部で検出され
た特徴に応じて、前記補間フレーム生成部における水平・垂直・時間方向の補間方法を切
り替えるようにした。
(もっと読む)
液体が充填した構造物および液体が充填していない構造物の非侵襲性測定用三次元超音波ベース機器
【課題】AF容量推定に使われる現在の方法はどれも理想的ではない。従って、羊水容量を正確に測定するためのより優れ、非侵襲性で容易な方法が必要とされる。
【解決手段】画像から構造物の面積および容積を決定する方法。デジタル画像は、取得され(410)、向上されて(418)、強度ベース・セグメンテーション(422)およびエッジベース・セグメンテーション(438)の方法によって並行処理される。両方の処理によってセグメンテーションした後、画像はAND演算子(442)によって結合され、仕上げ(464)される。分割された画像は次に出力され(480)、構造物の面積または容量が計算される(484)。
(もっと読む)
鳥威嚇装置および風力発電装置
【課題】 高性能なコンピュータを使わなくても飛翔物の速度をリアルタイムで算出し、飛翔物が鳥であることを検出し、鳥に対して効果的な威嚇を行うことによってバードストライク回避の可能性を高める。
【解決手段】 鳥威嚇装置(13)は、所定の空間領域(11)を連続撮影する撮影装置(12)と、その撮影装置(12)が取得した複数の画像データ間のモード変化で画像内の飛翔体(30)の速度をオプティカルフロー方式で算出し、その算出した飛翔体(30)の速度が予め設定した設定速度以上であって当該速度が鳥による速度に相応しい場合に鳥(31)であると判断する鳥検出装置(46)と、その鳥検出装置(46)が鳥(31)であることを検出したときに前記所定の空間領域(11)に向けて威嚇出力を出力する威嚇装置(13)と、を備える。
(もっと読む)
41 - 60 / 183
[ Back to top ]