
Fターム[5L096HA07]の内容
Fターム[5L096HA07]の下位に属するFターム
所定のパターンを見付けるもの (655)
与えられたパターンの種類を特定するもの (747)
Fターム[5L096HA07]に分類される特許
161 - 180 / 516
人体検出装置、および方法、監視装置および方法、並びにプログラム

【課題】顔画像の照合処理における処理負荷を低減させる。
【解決手段】輪郭検出部171は、画像よりエッジ画像を抽出し、エッジ画像バッファ172は、前記エッジ画像を順次記憶し、エッジ画像比較部182は、前記画像よりも前のタイミングにおけるエッジ画像と、前記画像におけるエッジ画像との比較により、ずれを検出し、前記ずれが検出されたと判定された場合、人物滞在判定部173は、画像内の範囲に人体が滞在していることを検出する。本発明は、監視システムに適用することができる。
(もっと読む)
画像処理装置、制御プログラム、コンピュータ読み取り可能な記録媒体、電子機器および画像処理装置の制御方法

【課題】 パターンマッチングによる対象物の認識において、対象物の周囲の明るさや、対象物に対する光の入射角度等の違いによって対象物の撮像画像の特徴の変化が生じ、1つのモデルパターンのみでは照合が難しい環境が生じた場合においても対象物の検出を可能とする画像処理装置を提供する。
【解決手段】 画像データ上の画素ごとに該画素の特徴を示す量を算出する勾配方向特定部2と、照合領域に含まれる特徴量と予め定めるモデルパターンとのマッチングの度合いを示す合致度を算出する合致度算出部6と、算出された合致度に基づいて、画像上の対象物の位置を特定する対象物座標算出部7とを備え、前記合致度算出部は、前記モデルパターンが複数である場合、基準とする基準モデルパターンを定め、前記基準モデルパターンと異なるモデルパターンのマッチング情報を、前記基準モデルパターンのマッチング情報にマッピングした上で合致度を算出する。
(もっと読む)
路側固定物検出装置
【課題】車両に搭載され、該車両側方の路側固定物を精度良く検出可能なガードレール検出装置を提供する。
【解決手段】距離画像センサにより、車両側方の判定対象物の距離画像を取得するとともに、車両の幅方向の走行位置に応じてテンプレート距離画像を生成し(ステップS5の処理を実行して)、該生成したテンプレート距離画像と該取得した距離画像とのマッチング度を算出し、該算出したマッチング度を基に判定対象物がガードレールか否かを判定する(ステップS11乃至ステップS13の処理を実行する)ようにした。
(もっと読む)
濃淡パターン判別装置、濃淡パターン判別方法、制御プログラムおよび該制御プログラムを記録したコンピュータ読み取り可能な記録媒体
【課題】濃淡勾配が緩やかに変化する濃淡パターンに対しても、精度良くパターンを判別することができる濃淡パターン判別装置を提供する。
【解決手段】本発明の濃淡パターン判別装置20は、濃淡を有する画像データである濃淡パターンと、濃淡パターンに対し類否を判別する基準の画像データとなる基準パターンとの類否を判別する判別装置であって、ベクトル生成部7では、所定の濃淡分布を有する濃淡勾配テンプレートを、上記基準パターンに対し走査させ、走査した各位置において、濃淡勾配テンプレートの領域の濃淡値と、濃淡勾配テンプレートの領域に対応する基準パターンの領域の濃淡値との相関値を計算し、走査した各位置における相関値を要素とする第1ベクトルを生成し、基準パターンおよび濃淡パターンの類否に用いる。
(もっと読む)
パターンの消失に対応したマッチング方式及びそれを用いた検査装置
【課題】
本発明の課題は微細なパターンが消失してしまう場合でも、正しく、かつ安定的に(誤報と区別して)マッチングできる手法及びそれを実装した検査装置を提供することである。
【解決手段】
本発明による検査装置は、通常のテンプレートの他に微細なパターンが消失した状態を模する縮退テンプレートを持ち、複数のテンプレートでマッチングを行い、それぞれのマッチングで得られた候補をマージすることで、実ウェーハ上で微細なパターンが消失している場合においても、正しく、安定的にマッチング位置を得ることができる。
【効果】
CADデータに存在しているパターンが実ウェーハ上では消失してしまっている場合にも、失敗せず、安定的にマッチングを行うことができる。
(もっと読む)
画像識別装置
【課題】抽出対象画像の特徴にばらつきがある場合でも、その抽出対象画像を高速かつ正確に識別可能な画像識別装置を提供する。
【解決手段】識別器選択適用部22は、弱識別器群の中から対象識別器を適宜選択して対象画像に適用することで識別結果y(t)を出力し、尤度値算出部23は、識別結果y(t)に、対象識別器の重みw(t)を乗じることで尤度値L(t)し、尤度値累積部24は、対象画像について算出された尤度値L(1)〜L(t)を累積した累積尤度値AL(t)を算出する。ポジティブ判定期待値算出部25は、対象クラス用の弱識別器群のうち、対象画像に未適用の弱識別器の重みを合計してなるポジティブ判定期待値EP(t)を算出し、尤度期待値算出部26は、累積尤度値AL(t)にポジティブ判定期待値EP(t)を加算した尤度期待値EL(t)を算出する。この尤度期待値EL(t)により、継続制御部27は、対象画像に対する処理を継続するか否かを判定する。
(もっと読む)
情報処理装置、情報処理方法、およびプログラム
【課題】人物等の推定対象に負担をかけることなく、推定対象の姿勢を推定する。
【解決手段】シルエット抽出部32は、被写体が撮像された撮像画像から、被写体が現れた領域を表すシルエットを抽出し、細線化部33は、シルエットを、そのシルエットの形状を簡略化したシルエット線に細線化し、マッチング部36は、予め用意されている、互いに異なる所定の姿勢を表す複数の姿勢モデル線毎に、姿勢モデル線とシルエット線との一致の度合いを表す一致度を算出し、姿勢推定部37は、複数の姿勢モデル線毎に算出された一致度のうち、一致の度合いが最大の一致度に対応する姿勢モデル線が表す姿勢を、被写体の姿勢として推定する。本発明は、例えば、パーソナルコンピュータに適用できる。
(もっと読む)
画像照合方法、画像照合装置、画像データ出力処理装置、プログラム及び記憶媒体
【課題】オリジナル画像がカラー画像である場合に、これをコピーしたりして形成された非オリジナル画像との類似性を、精度よく判定することのできる画像照合装置を実現する。
【解決手段】本発明の画像照合装置101では、文書照合部2が、入力された画像データより画像の形状に関する特徴を示す形状特徴量を抽出して、登録されている登録画像の形状特徴量と比較する。また、色類似性判定部4が、入力された入力画像と登録画像との類似性を判定し、入力された画像データより画像の色に関する特徴を示す色特徴量を抽出して、登録画像の色特徴量と比較し、上記入力画像と上記登録画像との類似性を判定する。さらに、彩度判定処理部43が、入力された画像データより入力画像の彩度情報を求める。類似性総合判定部5は、上記判定結果と、彩度の情報とを基にして、入力画像と登録画像との類似性を判定する。
(もっと読む)
画像処理装置及びその方法
【課題】画像上での外見の変化が大きい場合でも、高い位置精度で対象オブジェクトを追跡できる画像処理装置を提供する。
【解決手段】オブジェクト領域推定部3は、オブジェクト情報記憶部2に記憶されたオブジェクト情報に基づき、画像入力部1より入力される入力画像上でオブジェクトが存在する推定オブジェクト領域を推定し、類似度分布生成部4は、推定オブジェクト領域とその周辺領域について識別器によって類似度分布を求め、オブジェクト情報決定部5は、類似度分布に基づきオブジェクト領域座標、テンプレート画像を求め、オブジェクト情報記憶部2に記憶する。
(もっと読む)
照明システム
【課題】室内における人の存否を正確に判断し、照明器具の点滅および調光を適切に制御する。
【解決手段】室内に設置された1ないし複数の照明器具L1〜Lnと、室内を時系列に順次撮像する撮像装置1と、撮像した画像データに基づいて、室内における人の存否を判断する判断装置2と、人の存否に応じて照明器具L1〜Lnの点滅および調光を制御する照明制御装置3を備える。判断装置2は、撮像した画像データからキャンセルする第1のテクスチャデータを設定する設定部21と、画像データ及び第1のテクスチャデータを記憶する記憶部22と、画像データの差分を順次演算することにより、室内において移動する第2のテクスチャデータを抽出する演算部23と、第1のテクスチャデータと前記第2のテクスチャデータの一致、不一致に応じて、室内における人の存否を判断する判断部24と、撮像装置1によって撮像した画像を表示する表示部25から構成される。
(もっと読む)
複数の保存されたディジタル画像を検索するための方法及び装置
複数の保存されたディジタル画像が検索される。検索クエリに従って、画像が取得される(ステップ204)。該取得された画像は、画像の内容の所定の特徴に従ってクラスタリングされる(ステップ208)。クラスタは、所定の基準に基づいてランク付けされる(ステップ210)。該ランク付けされたクラスタに従って、検索結果が返される(ステップ212)。 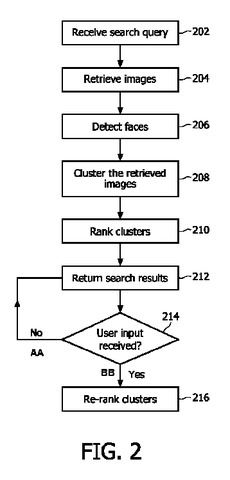 (もっと読む)
(もっと読む)
画像処理装置および方法並びにプログラム
【課題】画像中の注目する画像部分をトリミングルールに基づいて自動的に抽出して部分画像を作成する。
【解決手段】オリジナル画像Pを記憶し、オリジナル画像Pを記憶し、所定のオリジナル画像から切り出された所定の部分画像の構図情報を学習することによって得られたトリミングルールRを記憶し、オリジナル画像Pの色、明度、および、オリジナル画像Pに現れた直線成分の方向に基づいて、オリジナル画像P中の各部分の特徴が部分の周囲に位置する部分の特徴と異なる度合いを求めて、これらの度合いに応じて注目領域をオリジナル画像Pの中から抽出し、記憶されているトリミングルールRに基づいて、抽出された注目領域を含む所定の範囲内の画像を、オリジナル画像Pから切り出すことにより、ユーザの好みや癖を反映した部分画像Qを作成する。
(もっと読む)
欠陥分類方法、プログラム、コンピュータ記憶媒体及び欠陥分類装置
【課題】欠陥画像がない場合又は欠陥画像が少数しかない場合でも、撮像された基板の検査対象画像から当該基板の欠陥を適切に分類する手段の提供。
【解決手段】欠陥分類装置200は、設計手段201と診断手段202を有している。設計手段201ではモデル生成部213において、テンプレート記憶部212内の欠陥テンプレートと教示用画像を合成して欠陥モデルを生成する。第1の分類クラス設定部214では、欠陥モデルにおける欠陥の特徴量を算出し、欠陥の分類クラスを設定する。欠陥の特徴量と分類クラスとの関係は、記憶部220に記憶される。診断手段202では特徴量算出部232において、ウェハの検査対象画像から欠陥の特徴量を算出する。分類部233では、特徴量算出部232で算出された欠陥の特徴量に基づいて、記憶部220内の欠陥の特徴量と分類クラスとの関係から、ウェハの欠陥を分類クラスに分類する。
(もっと読む)
オブジェクト検出方法、オブジェクト検出装置、およびオブジェクト検出プログラム
【課題】
本発明は、二次元的に配列された画素で表現された画像から特定種類のオブジェクト、例えば人間の頭部や人間の顔などを検出するオブジェクト検出方法等に関し、検出対象のオブジェクトが画像上に様々な寸法で写し出される場合であっても、そのオブジェクトを高速に検出する。
【解決手段】
オブジェクト検出対象の原画像を構成する画素を所定比率で間引くことにより、又は所定比率で段階的に間引くことより、原画像と一枚以上の間引画像とからなる画像群を生成する画像群生成ステップS21と、
相対的に小さい画像に相対的に狭い領域に作用するフィルタを作用させる抽出過程から相対的に大きい画像に相対的に広い領域に作用するフィルタを作用させる抽出過程に向けて順次に繰り返すことにより、原画像中から特定種類のオブジェクトを検出する段階的検出ステップS24とを有する。
(もっと読む)
画像処理装置
【課題】環境条件に依存した部分がある画像であっても、環境条件に依存した部分の影響を取り除いて他の画像との類似度を算出することができる画像処理装置を提供することを目的とする。
【解決手段】2つの画像の画像間における類似度を算出する画像処理装置において、画像からエッジを抽出し、エッジ画像を生成するエッジ画像生成手段103と、エッジ画像生成手段により生成された2つの画像のうちの一方の画像のエッジ画像と、エッジ画像生成手段により生成された環境変動に依存しない参照画像のエッジ画像とに基づいて環境変動非依存画像を生成する非依存画像生成手段104と、非依存画像生成手段により生成された環境変動非依存画像に基づいて、2つの画像間の類似度を算出する類似度算出手段105とを備えることを特徴とする画像処理装置。
(もっと読む)
画像処理装置、画像処理方法、およびプログラム
【課題】一様な照明変化ではなく各スペクトルが変動した場合において、画像の照合が困難であった。
【解決手段】基準画像の各画素と、対象画像の各画素について、2以上の色成分を取得する色成分取得部と、基準画像の各画素の色成分ごとに、方向符号値を算出し、1以上の方向符号値の集合である第一の方向符号値群を取得し、かつ、対象画像の各画素の色成分ごとに、方向符号値を算出し、1以上の方向符号値の集合である第二の方向符号値群を取得する方向符号値算出部と、色成分ごとの第一の方向符号値群と、色成分ごとの第二の方向符号値群との類似度である第一の類似度を算出し、当該色成分ごとの第一の類似度を用いて、基準画像と対象画像との類似度である第二の類似度を算出する類似度算出部と、第二の類似度を出力する類似度出力部を具備する画像処理装置により、カラー画像の類似度の精度の高い検出が可能となる。
(もっと読む)
物体検出装置
【課題】カメラによる撮影を遮蔽する遮蔽物体が出現する状況が生じても対象物体を正確に検出することができる物体検出装置を提供する。
【解決手段】複数の背景画像を記憶するデータベース8,10と、新たに取り込んだ入力画像に最も類似する背景画像をデータベース8,10から選択する最適背景選択手段3と、背景画像と入力画像との差分画像の画像面積と、不審物体に関して規定した画像面積範囲との比較結果に基づいて、不審物体を検出する不審物体検出手段4と、背景画像と入力画像との差分画像の画像面積と、遮蔽物体に関して規定した不審物体より大きな画像面積を表す画像面積範囲との比較結果に基づいて、遮蔽物体を検出する遮蔽物体検出手段11と、物体検出手段4,11によって両物体のいずれも検出されない場合、不審物体及び遮蔽物体が撮影されていない背景画像を更新する更新背景学習手段7とを備える。
(もっと読む)
対象及び事象を分類する映像センサ及び警報システム並びに方法
防護領域内への侵入を検知する方法及びシステム。取得された画像データよりも少ない寸法性を有する縮小画像データセットを生成するように、画像データは取得されて処理される。縮小画像データセットは、警報条件を決定するために、縮小画像データセットが評価される集中型警報処理デバイスに送信される。センサにおいて画像データを処理するステップは、バックグラウンド情報とフォアグラウンド情報とを分離するステップと、前景の対象を認識するステップと、その顕著な特徴を抽出するステップとを含む。警報条件の決定は、動作パターンを認識するステップと、その事例に従って特定の規則を適用するステップを含む。 (もっと読む)
パターン特徴抽出方法及びその装置
【課題】本発明は、入力のパターン特徴ベクトルから、判別に有効な特徴ベクトルを抽出
し、特徴次元を圧縮する際に、判別に有効な特徴量の削減を抑制し、より効率の良い特徴
抽出を行うための特徴ベクトルの変換技術を提供することにある。
【解決手段】入力のパターンの特徴量をその要素のベクトルに分解し、それぞれの特徴
ベクトルについて各々判別分析によって得られる判別行列を予め用意し、その判別行列に
よって規定される判別空間に各特徴ベクトルを射影して次元を圧縮した後に、得られた特
徴ベクトルを合わせて、再度判別行列によって再度射影 することによって、特徴ベクト
ルを算出する。
(もっと読む)
タイヤ表面を検査するために使用できるようにするようタイヤ表面の3次元画像を処理する方法
タイヤの表面の一部分を検査する方法であって、表面が隆起マークを有し、この方法では、検査されるべき表面の3次元プロフィールを求め、検査されるべき表面上の特徴的な箇所の存在場所を突き止め、これら箇所を基準面の3次元データから得られた対応の特徴的な箇所と照合して1組の対をなす照合状態の特徴的箇所を生じさせ、繰り返し、第1の変換関数により変換された基準面の特徴的箇所の各々とこれらと照合された検査されるべき表面の特徴的箇所の各々との間の相互間の距離の合計を表す値が最小であるように基準面の特徴的箇所に適用されるべき第1の変換関数を探し、第1の変換関数を基準面の特徴的箇所の全てに適用して変換済み基準面を得る検査方法。 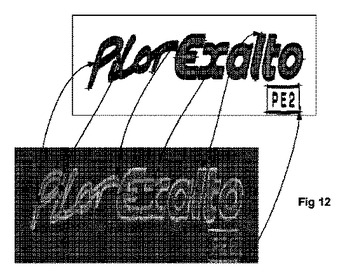 (もっと読む)
(もっと読む)
161 - 180 / 516
[ Back to top ]