
国際特許分類[A21C9/08]の内容
生活必需品 (1,310,238) | ベイキング;生地製造または加工の機械あるいは設備;ベイキングの生地 (3,791) | 生地製造または加工の機械あるいは設備;生地を種としてベイク品を取扱うもの (609) | 生地または生地玉を取扱うためのその他の装置 (143) | 生地片,例.展延生地,を取扱うための載置,整列,移送装置 (72)
国際特許分類[A21C9/08]に分類される特許
11 - 20 / 72
天板自動供給装置
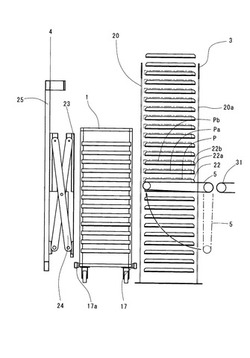
【課題】天板ラックを床面より上方に移動させる手段が必要になる。
【解決手段】ラックアンローダー3の後面側に、天板ラック1に収容状態の天板P、Pa…をラックアンローダー3に押し込むプッシャー4を設け、上記ラックアンローダー3の前面に、該ラックアンローダー3に移載された天板P、Pa…の搬出コンベヤ5を配設し、上記ラックアンローダー3の昇降コンベヤにおける支持片22、22a …の対向垂直部位での個数は、搬出コンベヤ5の搬送面より上方に、移載される天板P、Pa…の枚数以上が存在する様に設定し、上記搬出コンベヤ5は、ラックアンローダー3の前面外部に垂下状態で設置され、上方揺動状態で一対の昇降コンベヤ21、21a 間に水平に配置可能にし、ラックアンローダー3への天板P、Pa…の移載後、該ラックアンローダー3により天板P、Pa…を搬出コンベヤ5の搬送面より上方まで上昇させ、その後搬出コンベヤ5を上方揺動させる。
(もっと読む)
麺線塊ほぐし装置

【課題】麺線塊をほぐし突起によりほぐれ性状の良い麺線とする。
【解決手段】筐体11内に回転ドラム12が水平方向に設けられ、この回転ドラム12の放射方向の対向する2方向に、複数の弯曲した所定長のほぐし突起13が櫛歯状に突出されている。筐体11内には、ほぐし突起13の先端13aが通過する回転円よりも僅かに大径で、回転ドラム12の軸を中心とする円筒状の内壁14が設けられている。投入口15の下端から内壁14の回転ドラム12と同じ高さの水平位置hに至る間は、ほぐし突起13に対してクリアランスの小さな断面円弧状のほぐし面17とされている。投入口15から筐体11内に投入された麺線塊Nは、ほぐし突起13の高速回転運動により反時計方向に送られ、ほぐし面17の入口17a付近においてほぐし突起13により、1食分当りの麺線塊Nが複数回繰り返して突きほぐされる。
(もっと読む)
米生地形成機
【課題】高アミロース米を原料とした米粉50%以上の米シートでも、麺にしたときにちぎれにくく、麺のさばけも良く、また、生産性に優れ、安価に製造することができる米粉50%以上の米シートを製造するための米生地を形成する米生地形成機を提供する。
【解決手段】間隔を設けて配置した搬送ローラー3に布製のベースシート1をループ状に張設してこの布製のベースシート1をループ状に移動自在に設けたベースシート搬送部6と、このベースシート搬送部6のループ状に移動する布製のベースシート1上に、混合液を連続的に流し込む混合液供給部7と、この混合液供給部7から布製のベースシート1上に流し込まれた混合液を、布製のベースシート1の下側に設けた蒸気吐出部26で蒸煮する蒸煮部8とから成る米生地形成機。
(もっと読む)
麺線移送装置
【課題】小引から室への麺線の移動を自動で行う。
【解決手段】室側に移送ベルトを、高さ方向に所定間隔を保って複数段張設しておく。外枠に内枠が水平に移動できるように配設され、当該内枠に渡しチェンが配設される。また、外枠は昇降手段で昇降できるようになっている。昇降手段は、渡しチェンが小引装置の小引チェンから受け取った掛箸を、将校手段で昇降させて、所定の移送ベルトの高さに位置させる。ここで、水平移送手段が前記内枠を移動させて、渡しチェンを移送ベルトに接近させ、渡しチェンから移送チェンへ掛箸を移動させる。これによって、小引装置から室に掛箸が自動的に移動したことになる。
(もっと読む)
補助作業具
【課題】ロボットバンドを利用して食製品の上部にゴマなどの添え物を載置するなどの補助作業を行う補助作業具を提供する。
【解決手段】食製品5を保持自在なロボットハンド19に装着して補助作業を行うための補助作業具であって、食製品5に対して補助作業を行う補助作業部123Aを一端部に備えた補助作業具本体113の他端部に、ロボットハンド19に備えた複数の保持部材63A〜63Fによって把持される被把持部117を備え、この被把持部117は弾性部材によって構成してあり、前記被把持部117の上面に、ロボットハンド19に備えたエアー噴出口97と接続自在なエアー接続部121を備えている。
(もっと読む)
食品搬送システム
【課題】搬送用ロボットを使用して食製品を搬送する搬送システムを提供する。
【解決手段】食製品製造装置3によって製造された食製品5を搬送する食製品搬送手段7と、前記食製品5をを搬送する別個の搬送手段13と、前記食製品搬送手段7から前記別個の搬送手段13へ食製品を搬送する搬送用のロボット15を備えた食品搬送システムであって、前記ロボット15は、前記食製品5を保持する保持面77を備えた複数の保持部材63A〜63Fを開閉自在に備え、かつ前記各保持部材63A〜63Fの前記保持面77を清掃するための清掃手段を、前記ロボットのロボットハンド19に、又は前記ロボットの周囲の適宜位置に備えている。ロボットハンド19に装着して補助作業を行うための複数の補助作業具103を、前記ロボットハンド19に着脱交換自在に備え、前記ロボットハンド19に対して着脱交換するための複数の補助作業具103A〜103Cを備えた補助作業具交換部を備えている。
(もっと読む)
食品生地の整列方法及び装置
【課題】搬送コンベアによって搬送される食品生地を、整列部材に当接して整列する際の、食品生地の変形、粘着を抑制することのできる食品生地の整列方法及び装置を提供する。
【解決手段】搬送コンベア3Bによって下流方向へ搬送される複数列の食品生地1における先頭部分を、搬送方向に対して直交する直線L1,L2上に整列する食品生地の整列方法であって、前記各列に対応して食品生地1の当接整列を行う複数の整列部材27を、前記搬送コンベア3Bの搬送方向へ往復動自在かつ搬送コンベア3Bに対して上下動自在に備え、前記整列部材27が前記搬送コンベア3Bの搬送速度よりも小さな速度で下流方向へ移動しているときに、前記搬送コンベア3Bによって下流方向へ搬送される各列における食品生地1の先頭部を、各列に対応した前記各整列部材27に当接した後に前記整列部材27を上昇する。
(もっと読む)
食品載置方法及び装置
【課題】例えばトレイの周縁部に立上り部を備えている場合であっても、上記立上り部の内側に近接した位置へ食品を載置してデッドゾーンを少なくすることのできる食品載置方法及び装置を提供する。
【解決手段】一方向へ間欠的に又は連続的に移送される食品載置部材5に対して、当該食品載置部材5に対して水平方向へ進退自在かつ搬送端側に下方向へ傾斜した傾斜部を備えた搬送コンベア13によって食品7を整列載置する食品載置方法であって、前記搬送コンベア13の後退方向であって前記食品載置部材5の一端縁に近接した位置へ食品を載置するとき、前記搬送コンベア13の前記傾斜部11を斜め上方向へ縮小後退し、前記搬送コンベア13の前記傾斜部11を斜め上方向へ縮小後退するとき、前記傾斜部11の先端側に上下に揺動可能に備えた揺動端部を、前記傾斜部11に対して下方向へ揺動する食品載置方法である。
(もっと読む)
食品移載装置
【課題】
本発明は、シャッタ式移載装置とコンベヤ下流端往復式移載装置を入れ替えることなく、様々な形状の食品を天板などの受取面に整列しながら搬送することが可能な食品移載装置を提供するものである。
【解決手段】
複数の食品を縦列状に搬送する搬送コンベヤと、前記搬送コンベヤの下流端から供給される個々の前記食品を一時的に保持し、その後、前記食品を下方に排出するシャッタ装置と、前記シャッタ装置から排出される前記食品を受取り所要の間隔に整列しながら搬送する搬送装置を備えた食品移載装置において、前記搬送コンベヤの下流端部がほぼ水平の位置と下流側に向かって傾斜する位置との間を上下に揺動可能に備えるとともに、前記シャッタ装置のシャッタ部を使用位置と退避位置との間を移動可能に支持する支持部を備える。
(もっと読む)
麺帯製造装置
【課題】 麺帯製造機からの麺帯を受け取って移送するベルトコンベアの送り速度に工夫を加えるだけの簡潔な構造で、多重層の麺帯を簡単に製造することができる新規な麺帯製造装置を提供する。
【解決手段】 小麦粉に水や添加物を混合攪拌して、順次圧延し押し出すことにより帯状の粗麺帯A’を製造する麺帯製造機1と、この麺帯製造機1から送り出されてきた粗麺帯A’を下方で受け取って一定方向に移送するベルトコンベア2と、該ベルトコンベア2の終端で送られてきた麺帯を圧延する圧延ローラー3とからなり、前記ベルトコンベア2の送り速度を、麺帯製造機からの麺帯送り出し速度より遅く設定し、ベルトコンベア2上に落下した粗麺帯を波形にたるませながら移行するようにして、これを圧延機3で圧延することにより多重層の麺帯を製造する。
(もっと読む)
11 - 20 / 72
[ Back to top ]