
国際特許分類[A61H1/02]の内容
生活必需品 (1,310,238) | 医学または獣医学;衛生学 (978,171) | 物理的な治療装置,例.人体のつぼの位置を検出または刺激する装置;人工呼吸;マッサージ;特別な治療または人体の特定の部分のための入浴装置 (8,757) | 受動的な身体訓練のための装置;バイブレーション装置;カイロプラクティク器具,例.身体に衝撃を与える器具,折れていない骨を短時間引き伸ばしまたは整復させる外部器具 (893) | 運動のための伸長または屈曲装置 (743)
国際特許分類[A61H1/02]に分類される特許
11 - 20 / 743
滑り検知装置及び滑り検知方法
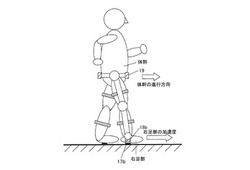
【課題】歩行補助装置などにおいてユーザーの足部の滑り発生状態を的確に検出する。
【解決手段】本発明の滑り検知装置は、人体の足部が地面に接地しているか否かを検知する第1のセンサーと、足部の速度もしくは加速度を検知する第2のセンサーと、人体の体幹の速度もしくは加速度を検知する第3のセンサーと、第1のセンサーが接地を検知していること、第2のセンサーで検知した速度もしくは加速度が所定値よりも大きいこと、第2のセンサーで検知した速度もしくは加速度と第3のセンサーで検知した速度もしくは加速度が所定値以上の差を有することを満足する場合を、滑り発生状態として検知する滑り検知処理を実行する制御部と、を備えることを特徴とする。
(もっと読む)
足趾トレーニング用靴下

【課題】足趾トレーニングを効果的に行うことが可能となるとが可能となる足趾トレーニング用靴下を提供する。
【解決手段】足趾トレーニング用靴下1は、装着者の足の甲部に沿う足甲部4と、装着者の足の底部に沿う足底部と、装着者の足趾を受入れる先端部2と、装着者の足の踵部を受入れる踵部と、先端部の少なくとも一部に設けられ足趾トレーニング用靴下を装着した状態で足趾を屈曲させた際に該足趾に負荷を与える負荷部と、先端部に設けられ負荷部が足趾に対し位置ずれするのを抑制可能な位置ずれ抑制部と、先端部と踵部との間に設けられる締付部4bとを備える。
(もっと読む)
動作訓練装置、動作訓練システム
【課題】被訓練者が指導を受けたときの姿勢や動作と、被訓練者が自己訓練を行っているときの姿勢や動作との差異を被訓練者に知らせることにより訓練効果を高める。
【解決手段】被訓練者が左右の足を載せる左足置部121および右足置部122が設けられ、左足置部121および右足置部122にそれぞれ作用する荷重を複数箇所で検出する荷重検出部131,132が設けられる。荷重情報抽出部201は、荷重検出部131,132が検出した荷重から被訓練者の姿勢と動作とに相当する現荷重情報を抽出する。情報評価部202は、荷重情報抽出部201が抽出した現荷重情報と目標設定部203にあらかじめ設定された目標荷重情報との差異を評価する評価量を算出する。算出された評価量は、提示部3を通して表示装置51に表示され被訓練者に示される。
(もっと読む)
四肢関節部装着装置
【課題】 2自由度の回転が可能で、外径寸法が小さいコンパクトな構成であり、四肢関節部回りに容易に装着できる四肢関節部装着装置を提供する。
【解決手段】 四肢関節部装着装置1は、入出力側にそれぞれ配されたリンクハブ2,3と、二組のリンク機構4A,4Bとを有する。リンク機構4A,4Bは、四つの回転対偶からなる三節連鎖のリンク機構であり、リンクハブ2,3に対して回転可能に端部リンク5,6を連結し、入力側および出力側の端部リンク5,6を中央リンク7に対して回転可能に連結してなる。入力側および出力側のリンクハブ2,3は、貫通した中空部20を有する。入力側および出力側のリンクハブ2,3間に四肢関節部が位置し、かつ各リンクハブ2,3の中空部20内に四肢関節部に続く部位がそれぞれ挿通された状態で四肢関節部回りに装着される。
(もっと読む)
荷重センサ、及び歩行支援装置
【課題】荷重がかかる方向にかかわらず正確に測定することが可能な、1軸検出用のロードセルを使用した荷重センサを提供する。
【解決手段】歩行支援装置の足裏板50に荷重センサ11が配設される。荷重センサ11は、地面に接地する三角形状の接地面部品64と、足裏板50との距離を所定距離内で移動させる3つのスライドピン63と、足裏板50に配設されたロードセル60を備えている。ロードセル60は、荷重が作用を受けるロードボタン61が接地面部品64に対向するように足裏板50に配設される。一方、ロードボタン61に対向する位置には、接地面部品64に凹部641が形成され、この凹部641に球体642が配置される。接地面部品64に作用した荷重は、球体642を介して、ロードボタン61に伝達されるため、ロードボタン61に常に軸方向の力が加わることになる。
(もっと読む)
歩行支援装置
【課題】二重関節において歩行アシストに適するように変動過度特性を動的に調整する。
【解決手段】歯車54は、中央にザグリ部75を有する貫通孔76が形成されている。ザグリ部75の内周側には、伸縮する偏心アクチュエータ73a〜73dが十字状に設置されている。偏心アクチュエータ73b、73dは、固定軸55の両側に対向して配置されており、端部は、固定軸55の両側を挟持している。偏心アクチュエータ73a、73cは、偏心アクチュエータ73b、73dの軸線に対して垂直な方向において、固定軸55の両側に対向して配置されており、端部は、固定軸55の両側を挟持している。偏心アクチュエータ73a〜73dを駆動して歯車54の回転軸を中心点80から貫通孔76内の任意の点に偏心させる。
(もっと読む)
歩行支援装置
【課題】二重関節においてアクチュエータの単位動作量当たりの変動過度特性を調整する。
【解決手段】歯車54の歯車面には、ラックギア67が円状に形成されており、連結アーム61に固定されたウォームギア72がかみ合っている。ウォームギア72は、連結アーム61に固定された連結アームアクチュエータ71の回転軸に取り付けられている。連結アームアクチュエータ71を駆動してウォームギア72を回転させると歯車54に対する連結アーム61の取り付け角度が変化する。このようにして連結アーム61の取り付け角度を調整することにより、膝関節アシストアクチュエータ18の単位動作量当たりの関節動作量や関節動作トルクの変動過度特性を調整することができる。また、歯車54とラックギア67がゼロクリアランスとなるようにして連結アーム61のがたつきを抑制することができる。
(もっと読む)
歩行支援装置
【課題】安定的固定と装着感の両者を満足させることを目的とする。
【解決手段】締付力を変更する固定具アクチュエータを設けることにより、歩行支援装置の締付力を可変にする。そして、1歩行周期の間を動作の状態に応じて区分し、各歩行動作状態の区分毎に各装着部21〜23の締付強度を予め決めておく。そして、各センサ出力から、脚がどの区分の歩行動作状態にあるかを検出し、検出した区分対応する締付力で各装着部21〜23を締め付ける。
(もっと読む)
歩行支援装置
【課題】二重関節において歩行アシストに適した変動過度特性を実現する。
【解決手段】歯車54と歯車56の回転軸は、同じオフセット量だけ偏心させて軸支されている。このため、歯車54を駆動すると歯車54と歯車56のギア比が無段階で連続的に変化する。これにより単位アクチュエータ動作量当たりのトルクや関節動作速度も連続的に変化する。これを用いると、歯車54、歯車56の偏心オフセット量、連結アーム61の初期角度、連結軸62の位置(回転中心から連結軸62までの距離)を各種設定することにより、二重関節部50に様々な特性を持たせることができる。そのため、脚部の運動特性に合わせて二重関節部50の特性を廉価に最適化することができる。
(もっと読む)
背筋伸ばし器具
【課題】老人や女性など握力の弱い人も、容易に背筋伸ばしが出来る、身体の負担にならない背筋伸ばし器具を提供する。
【解決手段】椅子に座った状態で、両腕の腋に挟みぶら下がる事の出来る、腋挟み部分(左右移動、回転可能)を背後より二箇所設け、下側に位置する所に、上下調整可能な椅子を設ける、両腕の腋に腋挟み部分を挟み、椅子に座ってぶら下がり、椅子と尻の隙間が出来る寸前で止めるか、椅子と尻の隙間を空けるか、椅子の調整で、両腋にかかる体重の強弱調整が出来て身体に無理なく背筋が伸び、ぶら下がる事を特徴とする、背筋伸ばし器具。
(もっと読む)
11 - 20 / 743
[ Back to top ]