
国際特許分類[B23P19/04]の内容
処理操作;運輸 (1,245,546) | 工作機械;他に分類されない金属加工 (71,475) | 金属の他の加工;複合作業;万能工作機械 (3,247) | ある程度の変形を伴うかどうかに関わらず,金属部品または金属対象物,または金属と非金属とによりなる部品を単に一体に結合または分離するための機械 (1,498) | 部品の組立て用,または分解用 (562)
国際特許分類[B23P19/04]の下位に属する分類
ねじまたはナットの締付けまたは緩め機 (291)
ボルトやその他の部材に座金,クリップ類をはめる機械 (5)
国際特許分類[B23P19/04]に分類される特許
71 - 80 / 266
ハンドガイド装置とその制御方法
【課題】装置の可動範囲内で組付を完了できるハンドガイド装置とその制御方法を提供する。
【解決手段】ワーク3を把持するワーク把持装置12と、ワーク把持装置を有する細長いハンド14と、ハンドの末端部を片持ち支持し末端部を所定のロボットエリア内で移動可能なロボット16と、ハンドの先端部に設けられロボットの作動を操作するオンハンド操作盤18と、ロボットを制御するロボット制御装置20とを備える。ハンド14は、作業対象物2にワーク3を組付ける際に、オンハンド操作盤18が作業対象物からロボットの反対側に突出する長さを有している。ロボット制御装置20は、ロボット16を自動制御する自動モードと、ロボット16をオンハンド操作盤18により手動制御する協働モードとを有しており、人6の判断や経験を必要とする作業時のみ協働モードに切替え、その他の作業を自動モードで実行する。
(もっと読む)
情報処理方法及び装置並びにプログラム

【課題】高速、高精度、かつ制御系として安定に、マニュピュレータを対象物まで移動させること。
【解決手段】装置は、カメラが取り付けられたロボットアームを、対象物まで移動させる移動制御を行う。すなわち、装置は、対象物が検知されていない場合、対象物の位置に基づいて予め設定された目標位置までの経路に沿って、マニュピュレータを移動させるティーチングプレイバック制御を実行する(ステップS1)。装置は、対象物が検知された場合、目標位置よりも対象物に近い位置を新たな目標位置として、新たな目標位置までの新たな経路を設定して、移動制御を切り替えるための切替条件が満たされるまでの間、新たな経路に沿って、マニュピュレータを移動させるティーチングプレイバック制御を実行する(ステップS3及びS4)。装置は、切替条件が満たされた場合、視覚サーボ制御を実行する(ステップS5)。
(もっと読む)
外部操作ハンドガイド装置とその制御方法
【課題】装置の可動範囲内で組付作業を完了することができる外部操作ハンドガイド装置とその制御方法を提供する。
【解決手段】ワーク3を把持するワーク把持装置12と、ワーク把持装置を有する細長いハンド14と、ハンドの末端部を片持ち支持し末端部を所定のロボットエリア内で移動可能なロボット16と、ハンドの先端部に設けられロボットの作動を操作するオンハンド操作盤18と、ロボットを制御するロボット制御装置20とを備える。ロボットエリアと組立ラインの間に、ハンド14が移動可能な作業エリアとハンドが侵入できない安全エリアとが隣接して設けられ、オンハンド操作盤18は、作業対象物にワークを組付ける際に、作業エリア内に位置するように設定されている。ロボット制御装置20は、ロボット16を自動制御する自動モードと、ロボット16をオンハンド操作盤18により手動制御する協働モードとを有している。
(もっと読む)
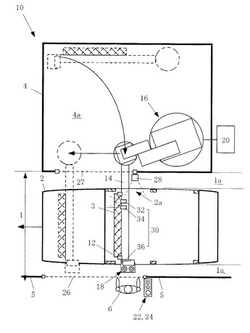
ハンドガイド装置とその制御方法
【課題】単純作業はロボットに任せ、人の判断や経験を必要とする作業時のみ、人がロボットを操作して、組立ライン上を移動する作業対象物にワークを組付けることができるハンドガイド装置とその制御方法を提供する。
【解決手段】ワーク3を把持するワーク把持装置12と、ワーク把持装置を有する細長いハンド14と、ハンドの末端部を片持ち支持し末端部を所定のロボットエリア4a内で移動可能なロボット16と、ハンドのワーク把持装置近傍に設けられロボットの作動を操作するオンハンド操作盤18と、ロボットを制御するロボット制御装置20とを備える。ロボット制御装置20は、ロボット16を自動制御する自動モードと、ロボット16をオンハンド操作盤18により手動制御する協働モードとを有しており、人6の判断や経験を必要とする作業時のみ協働モードに切替え、その他の作業を自動モードで実行する。
(もっと読む)
接合方法、接合器具及び締結要素
本発明は、接着剤(30)を第1の温度(T1)まで予熱し、接着剤を導通状態にするステップと、表面部分(34)を第2の温度(T2)まで予熱するステップと、接着面(109)を表面部分(34)の上に配置するステップとを含み、接着面(109)を表面部分(34)の上に配置した後、接着剤(30)に第3の温度(T3)までの本加熱を施して接着剤を硬化させ、これにより締結要素(26)が部品(32)に恒久的に締結される、熱溶融可能かつ熱凝固可能である接着剤(30)が塗布された接着面(109)を有する締結要素(26)を、部品(32)の表面部分(34)の上に接合する方法に関する。 (もっと読む)
接着組立方法、接着組立装置、第1の接着工程用装置及び第2の接着工程用装置
【課題】接着構造で各接着部品の位置決め精度や組み付け品質を必要とする車体等の大型製品の接着による組み付けを確実にするとともに、作業員の作業上の安全を確保する。
【解決手段】作業員104は、移動治具108を有しこの移動治具108に接着剤が塗布された接着部品を保持させた台車103を、工場の床面GLに敷設されるレール102に沿って搬送する。作業員104は、台車103を第1の接着工程用装置201の上方で固定し、固定治具作用部209を上方へスライド移動させる等して接着部品同士を接着する。作業員104は、固定治具作用部209を下方に動かし、第1の接着工程用装置201の固定を解除した後、台車103を第2の接着工程用装置301の上方まで搬送し、そこで固定する。作業員104は、床下作業ピット302に侵入し、作業用開口部312を介して接着部品の下方に食み出た接着剤をかき取る作業を行う。
(もっと読む)
閉塞部材の取付装置
【課題】 複数種類の閉塞部材を確実に吸着把持してワークの開口孔を閉塞することができる閉塞部材の取付装置を提供する。
【解決手段】 ワークWの開口孔W1に弾性グロメットPを取り付ける閉塞部材の取付装置であって、ロボットアーム2の先端に装着したリニアサーボモータ3と、このリニアサーボモータ3の駆動軸4の先端に取り付けて弾性グロメットPを吸着する吸着部材5と、この吸着部材5の裏面を支持する押圧部材6と、駆動軸4を介して吸着部材5内の空気を吸引する吸引ポンプ7を備え、吸着部材5は円錐形状のカップ部13と、このカップ部13の先端周縁に連設する周縁部14から形成され、押圧部材6はカップ部13の裏面及び周縁部14の裏面に当接すると共にこれらを支持する。
(もっと読む)
回転式部品供給装置
【課題】ピッキングロボットシステムにおける部品供給装置の設置面積を節約し、且つ設備投資も少なくすることができる回転式部品供給装置を提供する。
【解決手段】部品を収容する複数の部品トレイ10と、複数の部品トレイ10の姿勢を保持して回転して前記部品トレイ10を移動させる回転部12と、ロボット30がピッキングする部品についての部品情報を受信し、部品情報に基づいて所望の部品が収容されている部品トレイ10を最頂部に配置するように回転部12を制御する部品トレイ制御装置14と、回転部12の最頂部近傍に設けられ、最頂部に配置されている部品トレイ10に収容された部品の3Dデータを取得する3Dセンサ20と、3Dセンサ20で取得した3Dデータを受信し、3Dデータに基づいてロボット30が所望の部品をピッキングするためのロボット制御信号を生成する画像認識装置22とを備える。
(もっと読む)
クランプ取換装置
【課題】本発明は、操作し易いクランプ取換装置を提供する。
【解決手段】本発明に係るクランプ取換装置は、機械アーム及びクランプを連接することに用いられ、前記機械アームに固定され、且つ第一ホルダーを備え、前記第一ホルダーから前記機械アームに対して背離する方向に向って第一フランジが延在し、前記第一フランジの外周面から前記第一フランジの直径方向に沿って少なくとも1つの第一係合部が延在する第一回転部と、一端が前記クランプに固定され、他端が前記第一回転部に活動接続し、且つ前記クランプに固定される第二ホルダーを備え、前記第二ホルダーの中心から前記第一回転部に向って第二フランジが延在し、第二フランジの外周面から第二フランジの直径方向に沿って少なくとも1つの第二係合部が延在する第二回転部と、を備え、前記第一回転部及び第二回転部が相対的に回転する時、第一係合部と第二係合部とが互いに係合されるか又は解除される。
(もっと読む)
部品組付け方法
【課題】ロボットによる組付けにおいて、直線、折れ曲がり、円弧などで多岐に渡る軌道生成を効率的に行い、環境変動や機差にも自動的に対応できる部品組付け方法を提供する。
【解決手段】部品1を部品2の孔に組付ける前に、L字状の概略軌道に沿って力センサ6による探索の範囲を限定する軌道制限胴をロボットハンド5の制御部に記憶させる。ロボットはステレオカメラ7の画像から組付け相手を探し、軌道制限胴内で力センサ6の検出値によって人間の手探り様に組付け方向を探索し、その道程を複数の教示点として記憶することで精密軌道を自習する。その精密軌道を用いた次回以降の組付けにおいては、教示点毎の力センサ6の検出値について記憶値と現在値とに差が出た場合は、精密軌道を微調整する。
(もっと読む)
71 - 80 / 266
[ Back to top ]