
国際特許分類[B23P19/04]の内容
処理操作;運輸 (1,245,546) | 工作機械;他に分類されない金属加工 (71,475) | 金属の他の加工;複合作業;万能工作機械 (3,247) | ある程度の変形を伴うかどうかに関わらず,金属部品または金属対象物,または金属と非金属とによりなる部品を単に一体に結合または分離するための機械 (1,498) | 部品の組立て用,または分解用 (562)
国際特許分類[B23P19/04]の下位に属する分類
ねじまたはナットの締付けまたは緩め機 (291)
ボルトやその他の部材に座金,クリップ類をはめる機械 (5)
国際特許分類[B23P19/04]に分類される特許
81 - 90 / 266
部品組付け方法
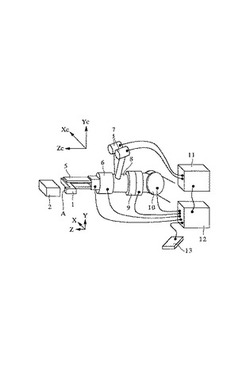
【課題】ロボットによる組付けにおいて、直線、折れ曲がり、円弧などで多岐に渡る軌道生成を効率的に行い、環境変動や機差にも自動的に対応できる部品組付け方法を提供する。
【解決手段】部品1を部品2の孔に組付ける前に、L字状の概略軌道に沿って力センサ6による探索の範囲を限定する軌道制限胴をロボットハンド5の制御部に記憶させる。ロボットはステレオカメラ7の画像から組付け相手を探し、軌道制限胴内で力センサ6の検出値によって人間の手探り様に組付け方向を探索し、その道程を複数の教示点として記憶することで精密軌道を自習する。その精密軌道を用いた次回以降の組付けにおいては、教示点毎の力センサ6の検出値について記憶値と現在値とに差が出た場合は、精密軌道を微調整する。
(もっと読む)
自動組立システム及び機械製品の製造方法

【課題】既存の作業スペースや作業設備をできるだけ用いながら、組立不良を精度良く検知して製造効率を向上することができるようにした自動組立システム及び機械製品の製造方法を提供する。
【解決手段】組立ロボット101、制御装置、組立前のワーク部品が予め配置されたトレイ、組立前のワーク部品を載置したトレイを組立ロボット側に搬入する搬入路105、組立作業を行なう組立ステージ102、組立ステージ102の下部に設けられる落下物センサ104と、を有し、制御装置は、予め教示された組立手順に従って、組立ステージ上で、搬入されたトレイ上のワーク部品に対して、組立動作を行い、落下物センサにより落下物が検知されると、組立動作を中断する。
(もっと読む)
ワーク把持装置
【課題】コレットの耐久性を向上できるワーク把持装置を提供すること。
【解決手段】把持装置は、円筒状のコレット43と、このコレット43の両端側に配置された一対の駒と、これら一対の駒をコレット43の内部に向かって押圧するアクチュエータと、を備える。コレット43には、このコレット43の端縁から中心軸に沿って直線状に延びるスリット本体61と、このスリット本体61の先端に形成された貫通孔62と、からなるスリット60A、60Bが形成される。貫通孔62は、スリット本体61の互いに対向する一対の内壁面611から互いに離れる方向に直線状に延びる一対の第1の内壁面621と、スリット本体61の延出方向に略垂直に直線状に延びる第2の内壁面622と、一対の第1の内壁面621のそれぞれの先端と第2の内壁面622の両端とを接続する円弧形状の第3の内壁面623と、を備える。
(もっと読む)
ドアインナーシールの固定方法並びに固定装置
【課題】ドアインナーシールの固定方法並びに固定装置に係り、ドアインナーシールの確実な固定を図り、かつ表皮仕様のバリエーションを高める。
【解決手段】ドアトリム本体におけるウエストフランジ23の裏面には、係止爪33の折曲片33bの重合部位において、取付孔24から離れるにしたがって深さが深くなる傾斜状肉抜き25を形成し、固定装置における加工ローラー64により係止爪33を折曲加工する際、ウエストフランジ23の取付面に対して所定角度傾斜するように加工ローラー64をスライド操作して、係止爪33を傾斜状肉抜き25面に押し付けるように係止爪33の折曲片33bを鋭角状に折曲加工することで、取付完了後において係止爪33のバックリング現象が生じても、係止爪33は少なくとも90°の折曲角度をもつため、適正な係止爪33の折曲姿勢が確保できる。
(もっと読む)
倣い機構
【課題】小さな倣い力で高精度な倣いを実現できる倣い機構を提供する。
【解決手段】摺動保持部2と可動部3との間に、摺動保持部2と摺動部31の磁力による吸着力と、可動部3の自重及び加圧エアによる静圧とを均衡させることにより静圧空気軸受けを形成する倣い機構1において、可動部3の倣い部32を、摺動部31より密度の大きな物質によって構成することにより、可動部3の回転中心Cと可動部3の重心Gを近づける構成とする。
(もっと読む)
金属板の挿入方法、挿入装置及び組立品の製造方法
【課題】弾性があるため所定形状に曲げ加工をした後も一部復元して形状ばらつきがある金属板を、位置決めして他部品に自動挿入する方法を提供する。
【解決手段】所定形状に曲げ加工された金属板2を、成形品の溝内へ、以下の工程を経て挿入する。(1)金属板2を、金属板にその両側から近接して来る一対のチャック爪3で把持してチャックし、当該チャックは前記所定形状を保持するために必要とする複数箇所で行う。(2)前記で保持された金属板2を、金属板を挟んでその一方の側は成形品の溝相当位置に位置決め固定され他方の側は前記一方の側に近接して来るこれら2種で一対のチャック爪4,4’で把持してチャックし、当該チャックは前記所定形状を保持するために必要とする複数箇所で行う。(3)前記チャック後に(1)のチャックを解放する。(4)その後、(2)のチャックで所定形状を保持した金属板を成形品の溝内へ挿入する。
(もっと読む)
抜管治具および抜管方法
【課題】伝熱管と、伝熱管を保持する保持板とを備えた熱交換器などの構造物から伝熱管を極力細断することなく、かつ効率的に抜脱可能な抜管治具および抜管方法を提案する。
【解決手段】抜管治具30は、周の一部を軸方向に切り欠かれた筒体部34と、筒体部34の切り欠き端部に形成された一対の鍔部35a、35bと、筒体部34の内周に突出させて設けられた複数の咬着突起部36と、鍔部35a、35bを嵌脱自在な締結溝39を有し、締結溝39に鍔部鍔部35a、35bが嵌入されると筒体部34の切り欠き端部を相互に接近させる締結部材32と、を備える。
(もっと読む)
車両のドアハンドリング治具および車両のドアハンドリング方法
【課題】本発明は、1つの治具で、ドアをドア搬送装置から車体の所定位置に搬送することを可能にする車両のドアハンドリング技術を提供することを課題とする。
【解決手段】車両のドアハンドリング治具20は、治具本体31に傾動自在に設けられドアの下端部36を受ける第1ワーク受け部40と、治具本体31からドアの下方へ挿入可能に設けられ、第1ワーク受け部40が待機位置へ移動されたときに第1ワーク受け部40に代わってドア13を受ける第2ワーク受け部43と、治具本体31に傾動自在に設けられ、ドアの車両長手方向の位置決めをなす長手位置決め部46と、ドアの側部37を車両の幅方向で挟むドアクランプ部51と、ドア13を吸着保持する吸着パッド52と、を備えている。
(もっと読む)
部材組立装置及び部材組立方法
【課題】部材の倒立、配送、及び溶接を効率よく全自動化し、円滑に部材を組み立てることのできる部材組立装置を提供すること。
【解決手段】パレット上に平置きされた板材を、倒立用ロボット(10)により倒立させて倒立部材置場(28)に配設し、当該倒立された板材を配送機構(38)のクランプハンド(42)により把持して溶接部(6)へと配送し、溶接ロボット(52)により仮溶接を施す。
(もっと読む)
治具用ロボットハンドとこれを用いた治具の取付け/取外し方法
【課題】ワークの位置や姿勢にばらつきがある場合でも、ワークと干渉することなく、ワークに治具を正確に取付け/取外しすることができる治具用ロボットハンドとこれを用いた治具の取付け/取外し方法を提供する。
【解決手段】ワーク1に治具8を取付け/取外しする治具用ロボットハンド10。ワーク1又はこれに固定された固定部材5に設けられた嵌合孔7と嵌合する嵌合部分12bを先端部に有し、嵌合部分12bと嵌合孔7との嵌合により、治具の取付け/取外し方向にその軸線が位置決めされる円筒形のガイドロッド12と、搬送ロボット9のハンド取付部9aに取り付けられ、ガイドロッドの末端部12eをガイドロッドの移動及び揺動に追従可能に保持する追従機構14と、治具8を把持/開放可能な把持装置16と、把持装置をガイドロッドの軸線に沿って昇降させる昇降装置18とを備える。
(もっと読む)
81 - 90 / 266
[ Back to top ]