
国際特許分類[B25J7/00]の内容
処理操作;運輸 (1,245,546) | 手工具;可搬型動力工具;手工具用の柄;作業場設備;マニプレータ (16,135) | マニプレータ;マニプレータ装置を持つ小室 (9,248) | マイクロマニプレータ (93)
国際特許分類[B25J7/00]に分類される特許
91 - 93 / 93
培養器に付着する細胞の分離装置および分離方法
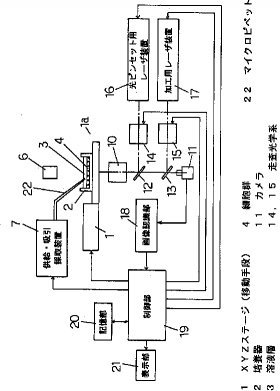
【課題】 目的とする動植物や微生物の細胞を効率よく分離して捕捉することができる、培養器に付着する細胞の分離装置および分離方法を提供することを目的とする。
【解決手段】 XYZテーブル1に支持された培養器2に付着する細胞群から所望の細胞を分離して採取するに際し、培養器2内へキレート剤溶液を加えて細胞の培養器2への付着力を弱めた後に、所望の細胞に光ピンセット用レーザ装置16のレーザ光を集光しトラップしてマイクロピペット22先端の吸引孔まで移動させ、供給・吸引・採取装置7に採取する。これにより、培養器に付着する細胞を破壊することなく効率よく細胞を分離して採取することができる。
(もっと読む)
微小操作のためのセンシング方式と操作方式およびそ の装置

【目的】 顕微鏡下での微妙なマイクロ操作に伴っておきる、顕微鏡の限られた観察視野による、立体形状把握の困難さと、顕微鏡下の機器操作における拡大画像に対する操作感覚と、実際に要求される微妙な操作間の人間感覚上のギャップを埋め、あたかも通常の物体を扱っているかのように、対象を観察し、操作するための手法を与える。
【構成】 多方位顕微光学系、その画像をステレオ処理し、3次元形状モデルを作成する3次元モデル形成部、3次元モデルをもとに右目、左目用に視差画像を生成する立体画像生成部、そこで作成された画像を人間の目前に表示し、立体画像を表示する画像表示装置、画像表示装置に取り付けられた頭の位置や顔の方向を計測する位置・姿勢センサー、人間の腕の動きを計測し反力を返すことのできるテレオペレーション用の操作部、人間の動作を解析し、その操作を縮小してマイクロオペレーション機器を操作するコントローラ部、そしてマイクロ力センサーを取り付けたマイクロオペレーション部から構成している。
(もっと読む)
マイクロマニピュレータ用操作装置
【目的】 マイクロマニピュレータの操作性を向上する。
【構成】 マイクロマニピュレータ3用の操作装置は、マウス23と制御部30とを有している。マウス23のクリックボタン26で3軸のうちの2軸を選択する。制御部30は、マウス23の操作に応じて、選択された2軸上でマニピュレータ3を移動させる。
(もっと読む)
91 - 93 / 93
[ Back to top ]