
国際特許分類[B25J7/00]の内容
処理操作;運輸 (1,245,546) | 手工具;可搬型動力工具;手工具用の柄;作業場設備;マニプレータ (16,135) | マニプレータ;マニプレータ装置を持つ小室 (9,248) | マイクロマニプレータ (93)
国際特許分類[B25J7/00]に分類される特許
51 - 60 / 93
マイクロマニピュレータ
【課題】把持指開閉の微調整可能で操作性の高いマイクロマニュピュレータを提供する。
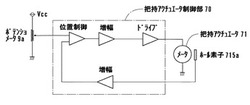
【解決手段】細胞ハンドリングシステムは、把持アクチュエータ71の駆動力により2本の把持指の先端部を近接させて細胞を把持するハンドリング部と、ハンドリング部をX、Y及びZ方向に移動させるX、Y、Z方向アクチュエータと、ポテンショメータ9aを有し、アクチュエータ71の駆動信号を入力するための第1コントローラと、X、Y、Zアクチュエータの駆動信号を入力するための第2コントローラと、ポテンショメータ9aから出力される電圧とホール素子715aから出力される電圧との差がゼロとなるようにアクチュエータ71の駆動を制御する把持アクチュエータ制御部70と、第2コントローラからの入力に応じたパルス数により、X、Y、Zアクチュエータの駆動を制御するX、Y、Zアクチュエータ制御部と、を備える。
(もっと読む)
二軸の力センサを備えたMEMSベース形のマイクログリッパおよびナノグリッパ

広範囲のサイズのマイクロ物品およびナノ物品を把持できかつ二軸の力の検出能力を備えているマイクログリッパの設計およびマイクロファブリケーション法を提供する。グリッピング運動は、1つ以上の電熱アクチュエータにより引起こされる。x方向およびy方向に沿う集積形の力センサは、グリップ力並びに法線方向に沿ってマイクログリッパアームの端部に加えられる力を測定でき、両方ともナノニュートンより小さい分解能を有する。マイクロファブリケーション法は、アクチュエータおよび力センサのモノリシック集積を可能にする。 (もっと読む)
マイクロマニピュレータ
【課題】1本のプローブでも容易に試料の採取が行うことができるマイクロマニピュレータを提供する。
【解決手段】プローブ7は、中心部15と、中心部15を同心円状に覆う外周部16とからなり、中心部15の先端17を外周部16から露出させている。中心部15はガラス15などの絶縁体で形成されており、電源9に接続されて、電源9に接続されて選択的に正極性もしくは負極性の電圧が印加されることで静電気を帯びる。また、外周部16は、鉄14などの導電体で形成されており、アース接続されて電気を帯びない状態となる。したがって、半導体ウエハ2上の試料3を採取した時に、試料3が外周部16の表面には吸着せず、先端17に吸着する。
(もっと読む)
ナノピンセット、把持力検出方法およびナノピンセットの駆動装置
【課題】微小な把持力を検出することができるナノピンセット
【解決手段】ナノピンセットに設けられたグリッパ部Gには一対のアーム1,2が設けられており、アーム1を駆動機構3による駆動することにより、アーム1,2間に試料を把持することができる。アーム2側には駆動機構4が設けられており、櫛歯状凹凸部40,41間に働く静電力によりアーム2が振動駆動される。試料を把持する際にはアーム2が振動駆動され、把持時における振動振幅の変化をアドミッタンス変化として検出することにより、把持力を算出する。
(もっと読む)
移動装置及び制御方法
【課題】長時間にわたって精密移動し得るようにする。
【解決手段】移動装置1は、第1ベース板3に対して、脚部ユニット11A及び11Bにおいて永久磁石7の磁力による通常吸着と当該永久磁石7及び電磁石部12の磁力による強吸着とを切り換えながら圧電素子10の全長を伸張させることにより前後方向に移動する第1移動部5と、当該第1移動部5と同様の動作により第2ベース板4を左右方向に移動させる第2移動部6とを組み合わせたことにより、第1ベース板3に対して第2ベース板4を2軸方向に自在に移動し得ると共に、静止状態においてコイルに電流を流し続けることなく静止位置を維持することができる。
(もっと読む)
移動装置及びその動作方法
【課題】簡易な構成であり、かつ、三つの自由度を持ち、さらに、電磁石の使用を回避できる移動装置を提供する。また、X−Y方向への移動におけるエネルギー効率が良く、制御も容易な移動装置を提供する。
【解決手段】例えばX方向への移動においては、第1圧電素子11を、比較的遅い速さで伸張させる。一方、第2圧電素子12を比較的遅い速さで収縮させる。これにより、ウエイト部3だけを、X方向に移動させることができる。ついで、第1圧電素子11を、比較的速い速さで収縮させる。同時に、第2圧電素子12を、比較的速い速さで伸張させる。これにより、ウエイト部3の慣性を利用して、支持部2を、X方向に移動させることができる。このようにして、移動装置をX方向に移動させることができる。
(もっと読む)
小さな粒状物質を分離又は捕捉する流体焦点レンズ
光ピンセットシステムに用いられるビーム操作部であって、当該ビーム操作部は少なくとも1つの光学素子を有し、かつ当該光ピンセットシステムからの信号に応じてレーザービームに作用するため、制御可能なように変形できる。当該ビーム操作部は、当該光ピンセットシステムの焦点距離を変化させ、かつ前記レーザービームを偏向させるのに用いられて良い。  (もっと読む)
(もっと読む)
マイクロマニピュレータ
【課題】弾力を有する微小物体を適切に把持できると共に、微小物体の弾力値を把握できるマイクロマニピュレータを提供する。
【解決手段】マイクロマニピュレータは、細胞を把持する把持指と、把持指を駆動する把持アクチュエータと、把持アクチュエータに内蔵され把持アクチュエータの回動角度を検出するホール素子と、少なくとも把持指が細胞に接触した後に、入力された把持アクチュエータの目標角度とホール素子で検出された回動角度との角度差が小さくなるように把持アクチュエータに供給する電流値を制御し、角度差に基づいて把持指が細胞を把持したかを判断し、把持したと判断したときに微小物体の弾力値を演算するPLC8と、を備えている。把持アクチュエータに供給される電流値が把持に伴う細胞からの反発力にあわせて制御される。
(もっと読む)
マイクロマニピュレータ
【課題】装置全体を複雑にすることなく微小物体を容易かつ適切に操作することができるマイクロマニピュレータを提供する。
【解決手段】マイクロマニピュレータ1は、細胞を載置するためのXYステージ42と、細胞を操作するための第1操作ユニット3と、第2操作ユニット4とを備えている。第1操作ユニット3は、細胞を操作するハンドリング部34と、ハンドリング部34をX、Y方向に移動させるXY駆動部31と、XY駆動部31に支持され、ハンドリング部34をZ方向に移動させるZ駆動部33とを有している。第2操作ユニット4は、細胞を操作するハンドリング部44と、XYステージ42をX、Y方向に移動させるXY駆動部41と、ハンドリング部44をZ方向に移動させるZ駆動部43とを有している。第1、第2操作ユニットでハンドリング部34、44に対する操作機能が異なる。
(もっと読む)
誘電泳動ピンセット装置および方法
粒子の捕捉を含む種々の用途のための、誘電泳動(DEP)ピンセット装置および方法。2つの電極が、先端を形成する細長物上に配置されているか、またはこれを構成する。これらの電極間に電圧を印加して、不均一な電磁場を先端に近接して発生させ、これによって誘電泳動トラップを作り出す。一旦捕捉すると、この粒子を、細長物または粒子が存在している媒体を操作することにより、所望の位置に移動させることができる。複数のDEPピンセット装置を、先端のアレイを形成するように配置してもよく、それぞれがその先端に限定した局所的な電磁場を発生することができる。かかるDEPアレイは、ナノリソグラフィまたはナノマニピュレーションに関連するナノファブリケーションプロセス、およびデータ記憶および検索用途において用いることができる。 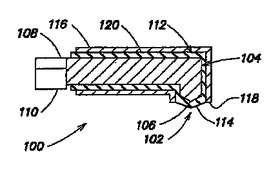 (もっと読む)
(もっと読む)
51 - 60 / 93
[ Back to top ]