
国際特許分類[B25J7/00]の内容
処理操作;運輸 (1,245,546) | 手工具;可搬型動力工具;手工具用の柄;作業場設備;マニプレータ (16,135) | マニプレータ;マニプレータ装置を持つ小室 (9,248) | マイクロマニプレータ (93)
国際特許分類[B25J7/00]に分類される特許
31 - 40 / 93
ピンセット付き走査型プローブ顕微鏡および搬送方法
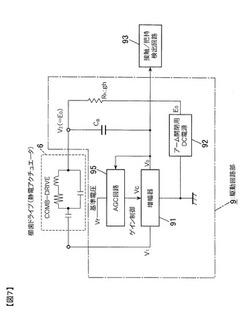
【課題】 ピンセットの基板への接触、試料の把持検出、試料の形状測定ができるピンセット付き走査型プローブ顕微鏡の提供。
【解決手段】ピンセット付き走査型プローブ顕微鏡は、探針部が形成された第1のアームと、第1のアームに対して開閉自在に設けられた第2のアームと、開閉駆動電圧が印加され、第2のアームを開閉駆動する静電アクチュエータと、静電アクチュエータ6が有する電気的等価回路を帰還回路として用いることにより自励発振させ、その自励発振により第2のアームを振動させる増幅器91と利得調整手段95を有し、第2のアームの物体への接触による振動状態の変化を検出する振動状態検出部93とを備える。
(もっと読む)
AFMピンセット、AFMピンセットの製造方法および走査型プローブ顕微鏡

【課題】走査型プローブ顕微鏡において、高精度な観察と、安定した把持とを両立させることができるAFMピンセットの提供。
【解決手段】AFMピンセットは、三角柱部材の稜線の先端を走査型プローブ顕微鏡の探針として使用可能な第1のプローブ10Bと、第1のプローブ10Bに対して開閉自在に設けられた三角柱部材から成る第2のプローブ20Bとを備え、各三角柱部材の所定の周面がほぼ平行状態で対向するようにプローブ10B,20Bを並置した。そして、稜線の先端で試料を走査する際の試料との干渉を防止する切り欠き部100を、第1のプローブ10Bに形成した。
(もっと読む)
試料操作装置
【課題】基板上に載置された試料を確実且つ速やかに把持できると共に、把持が完了したか否かを高精度に検出すること。試料に応じて把持力を調整すると共に試料の脱離が完了したか否かを高精度に検出すること、
【解決手段】基板表面2a上に載置された試料Sをマニピュレーションする装置であって、試料Sを観察して少なくとも位置データ及び形状データを取得した後、両データに基づいて観察用プローブ15と把持用プローブ16との間に試料Sが位置するように移動手段5によりピンセット4を位置決めさせ、該位置決め後、変位測定手段7による測定結果をモニタしながら移動手段5によりピンセット4を基板表面2aから一定距離離間した位置に高さ設定し、その後、設定した高さで変位測定手段7による測定結果をモニタしながら把持用プローブ16を観察用プローブ15側に移動させて、把持開始点を検出しながら試料Sを把持させる試料操作装置1を提供する。
(もっと読む)
ピンセット及びこれを備えたマニュピレータシステム
【課題】挟持する力(挟持力)を容易且つ高精度に検出することができると共に、小型化を図ること。
【解決手段】電子顕微鏡観察用の試料を挟持可能なピンセットであって、所定間隔離間して隣接配置され、それぞれ対向する側の先端に試料を挟持する挟持面71a、72aを有する一対の棒状挟持部材71、72を備え、一対の棒状挟持部材が、挟持面の基端側に挟持面と電気的に独立した状態で互いに対向して配された導電部73、74と、これら導電部間の静電容量を測定する静電容量センサ75とを備えていることを特徴とするピンセット70を提供する。
(もっと読む)
光勾配力を印加する改良された装置、システムおよび方法
【課題】 粒子を操作するための光トラップアレイを生成し、制御する。
【解決手段】 本発明は、レーザ光をビームレットに回折することと、(レーザ光に関して仮想のレンズとして働いて)ビームレットを収束させることとの両方が可能であり、それによって回折されたレーザビームをフォーカスレンズに転送するための複数の物理的なレンズの必要をなくす二重の機能を有する光学素子に関連する。本発明はまた、回折されないレーザ光から生じる反射・散乱の雑音の量を制限することによって、光トラップのモニタリングをより向上させることにも関連する。
(もっと読む)
マニピュレータ
【課題】熟練者に頼ることなく、試料台に貼り付いた試料を容易に採取することができるマニピュレータを提供する。
【解決手段】ピペット24、34の微調整のナノポジショナの駆動源に用いる圧電素子に、振動モード指示時に高周波の波形の電圧を印加するようにしたため、その振動によって、試料のベース22への貼り付きを解除することができ、試料の採取を簡便とすることができる。
(もっと読む)
マニピュレータ
【課題】複数の圧電素子を個別に駆動して、各圧電素子の駆動に応じた駆動力を駆動対象に付与すること。
【解決手段】ハウジング48内に、圧電素子54、55、間座56、軸受58、60が収納され、軸受58は、間座56との当接により、軸受60は、ロックナット66との当接により、それぞれねじ軸50の軸方向への移動が規制され、ロックナット66の位置に応じた締結力が圧電素子54、55に付与される。圧電素子54に電圧V1が印加されると、圧電素子54の操作駆動に伴う押圧力がねじ軸50を介してインジェクションピペット34に付与され、細胞に針が挿入される。圧電素子55に微動用電圧V0が印加されると、圧電素子55の微動駆動に伴う押圧力が圧電素子54、ねじ軸50を介してインジェクションピペット34に付与され、インジェクションピペット3の位置が微調整される。
(もっと読む)
マニピュレータシステム
【課題】簡単な操作でミリメートルオーダの駆動から回転モータの分解能以下の微小駆動までの動作を可能にしたマニピュレータシステムを提供すること。
【解決手段】コントローラ43は、倍率認識装置100の認識による顕微鏡倍率がX倍未満であると判別したときには、各軸の粗動用ステッピングモータ102を駆動する。この結果、XY軸テーブル36がX軸またはY軸に沿って移動し、Z軸テーブル38がZ軸に沿って移動し、インジェクションピペット34が粗動用目標位置に到達すると、XY軸テーブル36とZ軸テーブル38の駆動が停止される。その後、コントローラ43は、倍率認識装置100の認識による顕微鏡倍率がX倍以上であると判別すると、微動機構44の圧電素子54に微動用電圧V0を印加する。これにより、インジェクションピペット34が微動し、ベース22上の細胞に対する挿入位置に位置決めされる。
(もっと読む)
ホログラム2次元パターン、および、ラゲールガウシアンビームの生成方法、並びに、光マニピュレーションシステム。
【課題】ラゲールガウシアンビームを効率的に生成できる、ラゲールガウシアンビーム生成用回折格子としてのホログラム2次元パターンを提供する。
【解決手段】ラゲールガウシアンビーム生成用回折格子としてのホログラム2次元パターン200は、一様な流れの中におかれた湧源から周囲に一様に湧き出す2次元完全流体の流線に基づいて作製されている。
(もっと読む)
マニピュレータシステム、マニピュレータ制御プログラム及び吸入方法
【課題】確実、簡便かつ迅速に微小試料等の移し替え可能なマニピュレータシステム、マニピュレータ制御プログラム及び吸入方法を提供する。
【解決手段】試料テーブル7と、自動ピペット6と、XYZステージ51と、顕微鏡カメラ4と、PC3(パーソナルコンピュータ)と、を備えたマニピュレータシステムを構成する。PC3は、自動ピペット6を制御し、マイクロピペット61の中空部に細胞を吸入し及び吸入した細胞を吐出させる。さらに、XYZステージ51を制御し、マイクロピペット61を駆動する。このように、PC3は自動ピペット6及びXYZステージ51を制御し、シャーレ8中の細胞培養溶液と空気とを交互に吸入させることで、複数個の細胞を1つずつ分離した状態で連続的に吸入でき、1個ずつ分離した状態で吐出できる。このため、迅速かつ確実に細胞のマウント動作ができる。
(もっと読む)
31 - 40 / 93
[ Back to top ]