
国際特許分類[B25J7/00]の内容
処理操作;運輸 (1,245,546) | 手工具;可搬型動力工具;手工具用の柄;作業場設備;マニプレータ (16,135) | マニプレータ;マニプレータ装置を持つ小室 (9,248) | マイクロマニプレータ (93)
国際特許分類[B25J7/00]に分類される特許
11 - 20 / 93
アクチュエータ装置
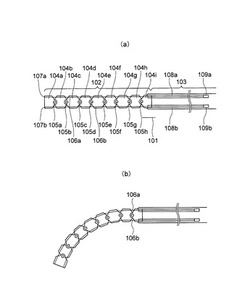
【課題】駆動力が用途に応じて適正な張力で制御できる形状記憶合金アクチュエータを提供する。
【解決手段】拮抗する一対の形状記憶合金ワイヤ106a、bと、形状記憶合金ワイヤ106a、bの少なくとも一方の張力を計測する張力測定部と、張力測定部で測定された結果に基づいて、各々の形状記憶合金ワイヤ106a、bに供給する熱量を独立に制御する制御部と、各々の形状記憶合金ワイヤ106a、bに供給される熱量の制御によって変位する可動部位に連結された可動端と、各々の形状記憶合金ワイヤ106a、bが所定の固定部位に固定された固定端と、を有し、制御部により、可動部位を所定の変位に移行もしくは所定の変位を維持するために各々の形状記憶合金ワイヤ106a、bに与えられる熱量は、張力測定部により計測された張力を所定範囲内に維持した状態で制御されることを特徴とする。
(もっと読む)
医学用ツールを患者の体内で操作する装置

【課題】 最小侵襲外科手術に適したマニプレータを提供する。
【解決手段】 医学用ツールを患者の体内で操作する装置は、患者の体内に挿入可能な管321と、該管321により支持され且つ第一及び第二の軸線を有するジンバル継手330と、第一及び第二の軸線の周りで枢動し得るようにジンバル継手330により支持されたツール322と、管321を通ってジンバル継手330まで伸びる第一及び第二の細長いコネクタ350と、第一及び第二のコネクタ350を通じてジンバル継手330に力を加え、ツール322を第一及び第二の軸線の少なくとも一方の周りで枢動させ得るように第一及び第二のコネクタ350にそれぞれ作用可能に接続された第一及び第二のアクチュエータ355とを備えている。第一及び第二のコネクタ350は圧縮状態及び張力状態にて作用可能である。
(もっと読む)
微小マニピュレータ装置
【課題】FIB装置に組み込んだ微小マニピュレータ部をその場でエッチング加工することで、従来困難であった1μm以下の微小物のハンドリングの確実性を高めるとともに、マニピュレータの再利用により作業効率やメンテナンス性を向上する。
【解決手段】微小マニピュレータ部を位置および向きを変えることのできる移動機構で保持することにより、マニピュレーション作業前にマニピュレータ先端部をFIB加工するとともに、作業中のマニピュレータ先端の汚染や破損があった場合でも、加工により再度使用可能な形状に再生する。
(もっと読む)
顕微鏡用観察装置
【課題】試料とマニピュレータとの相対的な位置を変えることなく、試料が載置されている試料台を容易に移動することが可能な顕微鏡用観察装置を提供すること。
【解決手段】顕微鏡用観察装置10は、少なくとも一つの可動軸を有する基台20と、基台20上に配置され、かつ基台20の有する可動軸と異なる少なくとも一つの可動軸を有する試料台30とを有する。試料を操作するためのマイクロマニピュレータ50を、連結部材40を介して基台20に取り付けて、基台20の可動軸による動作をマイクロマニピュレータ50の動作と連動させるとともに、試料台30の可動軸による動作をマイクロマニピュレータ50の動作と連動させないようにした。
(もっと読む)
微小マニピュレータ、及びそれを備えた観察装置
【課題】微小マニピュレータ自体の振動を軽減することで、微小な試料を確実に操作できる微小マニピュレータ、及びそれを備えた観察装置を提供する。
【解決手段】試料300(400)を把持するための対向する一対のアーム71と、アームを支持するベース部11と、ベース部に取り付けられてアームを開閉させる開閉アクチュエータ35とを有するマニピュレータ部100aと、マニピュレータ部の変位を検出する変位検出部110a1、110a2と、ベース部と外部装置200との間に取り付けられ、マニピュレータ部を試料に対して3次元移動させる移動機構120と、変位検出部によって検出された変位を打ち消すように、移動機構を制御する制御部130とを備えた微小マニピュレータである。
(もっと読む)
マニピュレータシステム及び微小操作対象物の操作方法
【課題】微小な操作対象物の交換作業を自動的に可能なマニピュレータシステム及び微小操作対象物の操作方法を提供する。
【解決手段】キャピラリ25,35を駆動対象として、外周側にねじ部を有するねじ軸と、回転軸を回転駆動するモータと、回転軸に固定されて、ねじ軸をその軸方向への移動を自在に支持するねじ要素と、圧電素子への印加電圧に応じて回転軸を微動駆動させる微動機構と、微動機構を伴って三次元空間を移動してキャピラリの位置を制御する三次元軸移動テーブルと、を有する一対のマニピュレータ14,16と、マニピュレータに操作される微小な操作対象物を観察する顕微鏡手段12と、マニピュレータの駆動を制御する制御手段43と、マニュピレータを駆動する操作手段47と、を備え、操作対象物を操作する際に、マニピュレータをシーケンス駆動することで、操作後の操作対象物と操作前の操作対象物との交換を自動化した。
(もっと読む)
マニピュレータ及びマニピュレータシステム
【課題】キャピラリを所定位置にセッティングするときに操作者による誤動作を防止可能なマニピュレータを提供する。
【解決手段】このマニピュレータは、微小対象物を操作するためのキャピラリを圧電素子92により微動駆動する微動機構と、キャピラリを3軸方向に駆動する駆動手段と、圧電素子が発生する電圧を検知する電圧検知手段97と、電圧検知手段による電圧検知に基づいてキャピラリの他部分への接触状態を監視する監視手段45,98と、を備える。
(もっと読む)
アクチュエータおよびマニピュレータ
【課題】煩雑な作業を行うことなく、ピペットを正確に直線運動させること。
【解決手段】ピペット素子34を駆動対象とするねじ軸52と、ねじ軸52とボールねじナット60を介して連結された回転軸54を回転駆動する中空モータ70と、圧電素子92への印加電圧に応じて回転軸54をその軸方向に沿って微動駆動させる微動機構44を備え、中空モータ70の駆動に伴う回転軸54の回転運動をボールねじナット60を介して直線運動に変換してねじ軸52に伝達する。中空モータ70の粗動駆動に伴うねじ軸52の直線運動によってピペット34をその軸方向に沿って粗動駆動し、微動機構44の微動駆動に伴うねじ軸52の直線運動によってピペット34をその軸方向に沿って微動駆動させる。
(もっと読む)
マニピュレータ、マニピュレータの駆動方法、マニピュレータシステム及び微小操作対象物の操作方法
【課題】容易な位置決めとインジェクションとを同時に満たすことができるマニピュレータを提供する。
【解決手段】このマニピュレータ1は、操作試料に対してインジェクションを行なうものであって、XYZ軸方向に駆動可能であり、少なくともインジェクションを行なう軸方向の圧電素子6を駆動源とするナノポジショナ7と、圧電素子に対して信号を印加することにより圧電素子を微動動作させる制御部10aと、を有する。
(もっと読む)
マニピュレータ
【課題】軸に直交する方向の微小な並進変位と軸まわりの回転変位を与えるコンパクトで単純な機構のマニピュレータを提供する。
【解決手段】作業を行うアーム部2と、アーム部2の回転角を制御する回転角制御部3と、アーム部2の変位を制御する変位制御部4と、を備えたマニピュレータ1において、回転角制御部3は、回転駆動力を付与する回転角付与手段31を有し、アーム部2は、回転角付与手段31に接続され、回転可能であると共に、屈曲可能な屈曲軸部21と、屈曲軸部21に接続され、屈曲軸部21が屈曲することにより移動する作用軸22と、作用軸22の先端に設置され、各種作業を行う作業部23と、を有し、変位制御部4は、作用軸22に力を付与する変位付与手段41と、変位付与手段41の駆動力を伝達し、作用軸22に常に当接する出力部材42と、を有することを特徴する。
(もっと読む)
11 - 20 / 93
[ Back to top ]