
国際特許分類[B25J9/10]の内容
処理操作;運輸 (1,245,546) | 手工具;可搬型動力工具;手工具用の柄;作業場設備;マニプレータ (16,135) | マニプレータ;マニプレータ装置を持つ小室 (9,248) | プログラム制御マニプレータ (1,513) | マニプレータ要素の位置決め手段に特徴のあるもの (394)
国際特許分類[B25J9/10]の下位に属する分類
電気的なもの (2)
流体的なもの
国際特許分類[B25J9/10]に分類される特許
181 - 190 / 392
3次元経路制御方法
【課題】 3次元空間における経路制御においても、ほぼ正確に経路誤差を評価でき、目標経路によらずに同じ扱いが可能となる新たな3次元経路制御方法を確立する。
【解決手段】3次元空間上の位置目標値の軌跡である目標経路に実際の位置の軌跡である経路を追従させる経路制御方法であって、ディジタル制御に対応するように、3次元空間上の位置目標値の軌跡である目標経路を離散化した目標点の集合として捉えて、現在位置から最も近い目標点を探索によって求め、前記最短目標点を含み、目標点列ベクトルに対して垂直となる平面上で現在位置と前記最短目標点間の距離を経路誤差として評価し、この経路誤差を小さくする制御を行う。
(もっと読む)
作業座標系の設定方法及び作業座標系の異常検出方法
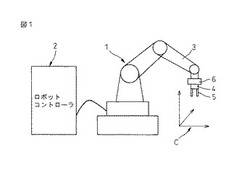
【課題】本発明は、ハンドと対象ワークとの相対的位置精度が高く、再現性に優れる作業座標系の設定方法及び作業座標系の異常検出方法を提供する。
【解決手段】ロボット1と対象ワークの相対的な位置関係を規定する作業座標系の設定方法において、ロボット1のハンド4が対象ワークに接触したことを検出するために力センサ6を用いることと、力センサ6からの検出値が予め設定された閾値を超えたときにハンド4が対象ワーク9に接触したと判断することと、接触位置を記憶することと、接触位置から作業座標系Cを算出すること、を備える。
(もっと読む)
ロボットの制御方法及びロボット制御装置

【課題】
関節の移動量に応じて到達可能な速度を仮速度パターンで予測し、予測された到達速度に応じて設計寿命を遵守できる適切な加減速度を自動的に設定するロボットの制御方法及びロボット制御装置を提供する。
【解決手段】
S20,S30で関節の運動が最高速度に到達する場合の寿命計算を基に決定された加減速度と、移動量及び最高速度に基づき到達速度、加速時間等を含む仮速度パターンを生成する。S40,S50で、仮速度パターンの到達速度が、最高速度に比して小さい場合、速度パターンに関する平均トルク及び平均速度に基づき仮速度パターンにおける寿命を算出する。寿命が製品寿命と等価でない場合には三角形速度パターンでの加減速度を所定量増加して仮速度パターンを再生成し、再生成した速度パターンに関して、S50の処理に戻り、S60で寿命が製品寿命と等価でない場合に、S70,S80,S50,S60を繰り返す。
(もっと読む)
原点位置判定装置および脚車輪型ロボット、並びに原点位置判定方法
【課題】 原点位置の判定を自立状態で行うことができ、部品点数および重量の増加を抑制するのに好適な原点位置判定装置を提供する。
【解決手段】 脚車輪型ロボット100は、回転関節18の関節角度が所定角度に達したときにZ相パルス信号を出力するロータリーエンコーダ42と、上部リンク80の姿勢に応じて変化する姿勢検出信号を出力する上部姿勢センサ80aと、下部リンク82の姿勢に応じて変化する姿勢検出信号を出力する下部姿勢センサ82aと、回転関節18を回転駆動する関節モータ40とを備える。そして、上部姿勢センサ80aおよび下部姿勢センサ82aからの姿勢検出信号に基づいて粗関節角度を算出し、誤差2εの範囲で関節モータ40により回転関節18を回転させてロータリーエンコーダ42からZ相パルス信号を入力したときは、算出した粗関節角度および回転関節18の回転角度量に基づいて原点位置を判定する。
(もっと読む)
パラレルメカニズム
【課題】 目標位置に到達するまでに要する時間を増大させることなく、目標位置に到達したときのエンドエフェクタの位置精度を向上させることが可能なパラレルメカニズムを提供する。
【解決手段】 パラレルメカニズム1は、ベース部2に取り付けられた3つの電動モータ4と、エンドエフェクタ13が取り付けられるブラケット14とが3つのアーム本体6によって並列に連結されて構成されている。電動モータ4を制御する電子制御装置30は、停止状態のエンドエフェクタ13をA点から目標位置(F点)まで動かす際に、エンドエフェクタ13を加速する際の加速度が、減速する際の減速度よりも大きくなるように、かつ、加速時間t1が減速時間t3よりも短くなるように電動モータ4を制御する。
(もっと読む)
6軸ロボットの5軸原点位置較正方法、6軸ロボットの制御装置、多関節型ロボットの軸原点位置較正方法及び多関節型ロボットの制御装置
【課題】専用の治具を取付けたり大型の検出器具を設置したりする必要がなく、多関節型ロボットにおける軸の原点位置を適切に較正する。
【解決手段】4軸の回転軸と5軸の回転軸と6軸の回転軸とが1点で交わり且つ5軸の回転軸が4軸の回転軸及び6軸の回転軸と直交するロボット2の制御装置3において、ロボット2を測定姿勢に保持させた状態から測定点の座標が戻るように各軸を移動させ、5軸の原点位置がずれていれば各軸を移動させる前での測定点の座標と各軸を移動させた後での測定点の座標とが一致しなくなる特性を利用し、各軸を移動させる前での測定点の座標と各軸を移動させた後での測定点の座標とを対比して誤差角度を導出して5軸の原点位置を較正する。
(もっと読む)
6軸ロボットの3軸原点位置較正方法、6軸ロボットの制御装置、多関節型ロボットの軸原点位置較正方法及び多関節型ロボットの制御装置
【課題】専用の治具を取付けたり大型の検出器具を設置したりする必要がなく、多関節型ロボットにおける軸の原点位置を適切に較正する。
【解決手段】2軸の回転軸と3軸の回転軸と5軸の回転軸とが平行で且つ交わらないロボット2の制御装置3において、ロボット2を測定姿勢に保持させた状態から測定点の座標が戻るように各軸を移動させ、3軸の原点位置がずれていれば各軸を移動させる前での測定点の座標と各軸を移動させた後での測定点の座標とが一致しなくなる特性を利用し、各軸を移動させる前での測定点の座標と各軸を移動させた後での測定点の座標とを対比して誤差角度を導出して3軸の原点位置を較正する。
(もっと読む)
6軸ロボットの2軸原点位置較正方法、6軸ロボットの制御装置、多関節型ロボットの軸原点位置較正方法及び多関節型ロボットの制御装置
【課題】専用の治具を取付けたり大型の検出器具を設置したりする必要がなく、多関節型ロボットにおける軸の原点位置を適切に較正する。
【解決手段】1軸の回転軸と2軸の回転軸が直交し且つ1軸の回転軸を含み2軸の回転軸に直交する平面上に測定点が存在し且つ3軸の回転軸及び5軸の回転軸が前記平面に直交するロボット2の制御装置3において、ロボット2を測定姿勢に保持させた状態から測定点の座標が戻るように各軸を移動させ、2軸の原点位置がずれていれば各軸を移動させる前での測定点の座標と各軸を移動させた後での測定点の座標とが一致しなくなる特性を利用し、各軸を移動させる前での測定点の座標と各軸を移動させた後での測定点の座標とを対比して誤差角度を導出して2軸の原点位置を較正する。
(もっと読む)
ロボット制御装置
【課題】位置ずれ検出動作において接触検出後のロボット停止動作を滑らかにする。
【解決手段】ロボットRに取り付けられた作業ツールTによってワークWの位置ずれを検出するための指令位置を算出する指令位置生成部2と、指令位置に基づいて作業ツールTを移動させる駆動制御部3と、作業ツールTがワークWへ接触したことを検出して停止信号Tsを出力する停止処理部8と、作業ツールTがワークWへ接触したときの接触位置Dvを記憶する接触位置算出部7と、位置ずれ量を算出して教示データTdを補正する位置補正部9と、を備える。停止信号Tsの入力により、駆動制御部3が認識している作業ツールTの現在位置を接触位置Dv、指令位置生成部2が出力している指令位置を惰走位置Svとして作業ツールTを惰走位置Svから接触位置Dvへ逆送させる惰走距離補正経路を算出し、本来の接触位置Dvで停止する。
(もっと読む)
サイクルタイム短縮のためのロボットの移動制御装置及び移動制御方法
【課題】面倒な試行錯誤をせずにロボットのサイクルタイムを効率的に短くすることができるロボットの移動制御装置及び移動制御方法を提供する。
【解決手段】移動時間初期値を使用したサイクルタイム(M0+Fc)の方がクランプ処理後のサイクルタイム(Mc+Fc)より短い場合は、新たな移動時間Mnewを計算し、これに基づいて新たな指令速度Vnewを計算する。このようにして得られた移動時間Mnew、指令速度Vnew及び時定数Fcが最終的な移動時間、指令速度及び時定数となり、サイクルタイムの短縮化が図られる。
(もっと読む)
181 - 190 / 392
[ Back to top ]