
国際特許分類[B25J9/10]の内容
処理操作;運輸 (1,245,546) | 手工具;可搬型動力工具;手工具用の柄;作業場設備;マニプレータ (16,135) | マニプレータ;マニプレータ装置を持つ小室 (9,248) | プログラム制御マニプレータ (1,513) | マニプレータ要素の位置決め手段に特徴のあるもの (394)
国際特許分類[B25J9/10]の下位に属する分類
電気的なもの (2)
流体的なもの
国際特許分類[B25J9/10]に分類される特許
141 - 150 / 392
パラレルリンクステージの調整方法、基準位置決め治具、およびパラレルリンクステージ
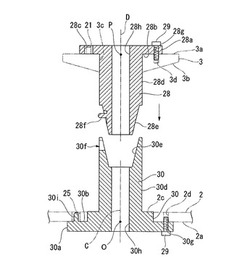
【課題】パラレルリンクステージの調整方法、基準位置決め治具、およびパラレルリンクステージにおいて、ベースに対するエンドエフェクタの基準位置出しとアクチュエータの原点補正とを、高精度かつ容易に行うことができるようにする。
【解決手段】パラレルリンクステージの調整方法であって、各パラレルリンク機構の動作を自由化するリンク自由化工程と、ベース2およびエンドエフェクタ3を相対移動させ、上基準部材28および下基準部材30を介して、ベース2およびエンドエフェクタ3を一定の位置関係に連結する位置出し工程と、各パラレルリンク機構のエンコーダから、各リンク長を取得して制御部に記憶させる調整位置取得工程と、上基準部材28および下基準部材30をパラレルリンクステージから取り外す基準位置決め治具取り外し工程と、各パラレルリンク機構の各リンク長を、制御部に記憶された各リンク長に設定する位置初期化工程とを備える。
(もっと読む)
ロボットの動作経路生成方法

【課題】作業間の動作経路を作成する際に、ロボットが異常動作をすることなく、特異姿勢又は特異姿勢近傍をスムーズ通過可能となっている実用的な動作経路を生成する。
【解決手段】本発明の多関節ロボットの動作経路生成方法は、動作経路を算出した時に、多関節ロボットが特異姿勢を通るか否かを判定する判定ステップと、判定ステップで特異姿勢を通ると判定された場合に、多関節ロボットを特異姿勢たらしめている関節軸を選択する軸選択ステップと、特異姿勢を含む動作経路を多関節ロボットが円滑に移動可能なように、軸選択ステップが選択した関節軸に関し、その軸値を外部から指定する指定ステップと、前記指定ステップが指定した軸値を用いて、多関節ロボットの動作経路を算出する経路算出ステップと、を含む。
(もっと読む)
ロボット及びその制御方法
【課題】ロボットの解体・点検作業を必要とするようなトラブルが発生する前に、ロボットの異常状態を検出すること。
【解決手段】本発明のロボットにおいては、ロボット制御手段40が、アーム駆動手段及び手首軸駆動手段を駆動してエンドエフェクタ25を所定の実位置に移動させ、エンドエフェクタ25が所定の実位置に到達した時点でのロボットアーム28の姿勢及び手首軸の角度位置を検出し、その検出結果に基づいて所定の実位置に対応する計測位置を算出して記憶し、異なる時点において取得された複数の計測位置の時系列データに基づいてロボットの状態を判定する。
(もっと読む)
ロボットの制御システム及びその制御装置
【課題】共通の基準信号に応じて複数のロボットの動作を制御するシステムのコストを低減する。
【解決手段】複数のロボット4の各々に対応して設けられ、信号出力装置11から出力される基準信号に応じてそれぞれ対応するロボット4を制御する複数の制御装置21、を備えるロボットの制御システム20であって、信号出力装置11及び複数の制御装置21を直列的に接続する複数の配線部品を備え、信号出力装置11から出力される基準信号が、複数の配線部品のうちの一つを介し、複数の制御装置21のうちの一つであるマスタ制御装置21Aに入力され、マスタ制御装置21Aに入力された基準信号が、残余の配線部品を介し、複数の制御装置21の残余であるスレーブ制御装置21Bへと伝達される。
(もっと読む)
ロボットのツール座標系の較正方法及びその治具
【課題】専門知識を持たない作業員や熟練度が低い作業員であっても、ロボットのツール座標系の較正作業を、ロボットに近づかずに精度良く行えるようにすること。
【解決手段】ロボット1のフランジ部9に取り付けたエンドエフェクタ17に、エンドエフェクタ17のツールセンターポイントTCP上に位置する部分を有するアタッチメント21をチャッキングさせる。また、ロボット1の設置面Aに固定した伸張式変位センサ19の繰り出し口19cから繰り出されたワイヤ19aの先端を、アタッチメント21の接続点Tに接続する。ロボット1の基台3に設定されるロボット原点Oに対する、伸張式変位センサ19の繰り出し口19cに設定される測定原点Mの位置ベクトルを示す方程式を、ロボット1のNパターンの姿勢分取得する。その連立方程式を解いてツール座標系の較正を行う。Nパターンの数は、連立方程式中の変数の数に応じて決定する。
(もっと読む)
ロボット教示プログラム修正装置
【課題】ロボット教示プログラムを教示修正するのに必要な時間等を大幅に削減する。
【解決手段】ロボット教示プログラム修正装置(1)は、ワーク(20)の画像を取得する撮像部(6)と、プログラム(13)の各教示点の三次元位置と撮像部により取得されたワークの画像とに基づいて、ワークの画像上における各教示点の二次元位置を計算する二次元位置計算部(11a)と、ワークの画像とワークの画像上における各教示点の二次元位置とを表示する表示部(5a)と、ワークの画像における明暗差に基づいてワークのバリ取り箇所を自動的に抽出する抽出部(11b)と、教示点の二次元位置が、バリ取り箇所に一致するように変更する教示点位置変更部(11c)と、変更後のワークの画像上における各教示点の二次元位置とロボット教示プログラムの各教示点とに基づいて、プログラムの各教示点の三次元位置を変更するプログラム変更部(11g)とを含む。
(もっと読む)
位置補正装置、位置補正方法、位置補正プログラム及び位置補正システム
【課題】溶接トーチの位置ズレによる溶接ミスを防ぐことが可能な位置補正装置を提供する。
【解決手段】位置補正装置50は、溶接トーチ20を移動させるロボット10の駆動を制御し、溶接トーチ20の位置ズレを補正する装置であって、予め設定された補正基準位置座標に基づいてロボット10を駆動することによって、溶接トーチ20を補正基準位置に移動させるロボット制御部52と、検出装置40によって検出された、補正基準位置に移動した溶接トーチ20の座標が入力される座標入力部53と、入力された座標に基づいて、溶接トーチ20の位置ズレを補正する補正部54と、を備え、ロボット制御部52は、補正基準位置において、溶接トーチ20が実際に溶接を行う溶接姿勢と同一姿勢となるようにロボット10を駆動し、補正部54は、溶接姿勢における溶接トーチ20の位置ズレを補正する。
(もっと読む)
モーション制御用指令システム、モーション制御用指令方法およびモーション制御システム
【課題】 安価で簡単な低速通信を使って段差なく滑らかな制御を実現でき、高速通信の場合と同等以上の制御性能を発揮できるモーション制御用指令システムを提供すること。
【解決手段】 モーション制御用指令システム1は、マスター制御装置2からその受信先装置であるスレーブ制御装置4に制御指令データCDを伝達するためのマスター制御装置2搭載のデータ送信手段3と、スレーブ制御装置4搭載のデータ受信手段5と、両制御装置2、4を結ぶデータ伝送経路8とからなり、制御指令データCDと同時にその処理に要すべき時間のデータ、つまり制御指令更新周期データTDも通信されるように形成されたシステムである。補間周期データTDはマスター制御装置2においてその都度生成され、制御指令データCDと一緒にスレーブ制御装置4側に送信される。
(もっと読む)
ロボットシステム及びその制御方法
【課題】操作性を向上させたロボットシステム及びその制御方法を提供すること。
【解決手段】ロボットシステム1は、所定空間内を移動可能なロボットアーム手段2と、所定空間内におけるロボットアーム手段2の現在位置を検出する現在位置検出手段と、所定空間内における、ロボットアーム手段2を移動させる目標位置を設定する目標位置設定手段53と、現在位置検出手段により検出された現在位置と、目標位置設定手段53により設定された目標位置と、の偏差δを算出する偏差算出手段52と、偏差算出手段52により算出された偏差δと、現在位置検出手段により検出された現在位置と、に基づいて、ロボットアーム手段2を目標位置へ移動させる制御を行う制御手段6と、を備えている。
(もっと読む)
多軸ロボット及びその速度制御装置
【課題】多軸ロボットの表面部位の移動速度を適正に規制しつつもその移動速度をなるべく高くする。
【解決手段】基台2に連設された複数の連結部材3〜8の先端にツール部材9を取り付けてなり、基台2及び複数の連結部材3〜8が互いに相対回転可能な多軸ロボット1であって、ツール部材9の移動時に各回転軸A1〜A6の角速度を制御する速度制御装置を備え、速度制御装置が、複数の連結部材3〜8及びツール部材9において予め設定された複数の表面部位の最高移動速度が所定の制限移動速度となるように当該回転軸の角速度を求める制御を実行する構成となっている。
(もっと読む)
141 - 150 / 392
[ Back to top ]