
国際特許分類[B25J9/10]の内容
処理操作;運輸 (1,245,546) | 手工具;可搬型動力工具;手工具用の柄;作業場設備;マニプレータ (16,135) | マニプレータ;マニプレータ装置を持つ小室 (9,248) | プログラム制御マニプレータ (1,513) | マニプレータ要素の位置決め手段に特徴のあるもの (394)
国際特許分類[B25J9/10]の下位に属する分類
電気的なもの (2)
流体的なもの
国際特許分類[B25J9/10]に分類される特許
111 - 120 / 392
軌跡制御装置
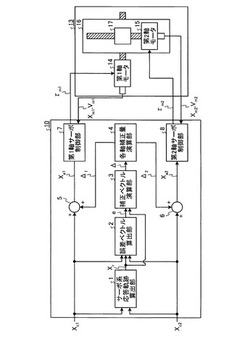
【課題】コーナ形状のように指令経路の方向が急峻に変化するような場合でも駆動系に過大な負荷や振動を生じさせずに、また制御系の安定性を損なうことなく軌跡誤差を抑制すること。
【解決手段】複数の可動軸のモータを同時制御することにより可動部の軌跡を制御する軌跡制御装置10において、サーボ系応答軌跡を演算するサーボ系応答軌跡算出部1と、誤差ベクトルを演算する誤差ベクトル算出部2と、誤差ベクトルとサーボ系応答軌跡の所定の参照点における移動方向に基づいて補正ベクトルを演算する補正ベクトル演算部3と、補正ベクトルを各軸に分配して各可動軸の補正量を演算する各軸補正量演算部4と、各可動軸の補正量を対応する軸の位置指令に加算する補正量加算部5、6と、各可動軸の位置がそれぞれの軸の補正後位置指令に追従するように各軸のモータ駆動トルクを出力することによりそれぞれの軸のモータを制御するサーボ制御部7、8を備えた。
(もっと読む)
7軸多関節ロボットの制御方法及び制御プログラム

【課題】手首の位置を移動する際に7軸多関節ロボットの形態の急激な変化を抑制する。
【解決手段】7つの回転軸のうちのいずれか1つを冗長軸に、残りの回転軸のうちの3つを基軸に、かつ3つの基軸のうちのいずれか1つを変数軸に定め、かつ、基端から前記手首までの直線距離と基端に最も近い回転軸の延在方向における基端から手首までの距離とに基づく手首の位置と前記変数軸の関節角とに関して定式化された4次方程式を解いて手首の位置を3つの基軸の関節角に逆変換するステップを含み、電源オン時に、7軸多関節ロボットの初期形態に基づいて4つの第1求解演算式のうちいずれか1つを特定して記憶し、 電源オンの後、記憶した1つの第1求解演算式を用いて逆変換するステップを遂行して手首の目標位置から3つの基軸の関節角を算定し、それにより、7軸多関節ロボットの動作を制御する。
(もっと読む)
ロボットシステム、その制御装置及び方法
【課題】サイクルタイムを増加させることなく、ハンドで把持した作業対象物の位置姿勢計測及び位置姿勢修正を行えるようにする。
【解決手段】アーム先端部11の位置姿勢を制御可能なアーム1と、アーム先端部11に取り付けられ、作業対象物3を把持する把持機構21を具備し、把持した作業対象物3のアーム先端部11からの相対位置姿勢を制御可能なハンド2と、把持した作業対象物3のアーム先端部11からの相対位置姿勢計測を行う位置姿勢計測装置22とを備えたロボットシステムにおいて、把持機構21で作業対象物3を把持した後、アーム先端部11が移動している最中に、作業対象物2のアーム先端部11からの相対位置姿勢の計測を行い、その位置姿勢計測の結果に基づいて、作業対象物3がアーム先端部11からの所定の相対位置姿勢をとるように、ハンド2のアーム先端部11からの相対位置姿勢の修正を行う。
(もっと読む)
教示ライン補正装置、教示ライン補正方法、及びそのプログラム
【課題】基準部位の相関関係が異なっていた場合も、その誤差の影響を緩和し、ティーチングデータを精度良く補正するための教示ライン補正装置、教示ライン補正方法、及びそのプログラムを提供する。
【解決手段】予め設定された基準部位の第1基準位置aと第2基準部位の第2基準位置bとを通る線を含む平面であり、且つ、第3基準部位の第3基準位置cで決定される第1平面を規定し、検出した第1基準部位の位置a´と、検出した第2基準部位の位置b´とを通る線を含む平面であり、且つ、検出した第3基準部位の位置c´で決定される第2平面を規定し、第1基準部位を原点とし、原点の前記第1基準部位の前記第1基準位置が、検出した原点の前記第1基準部位の位置と同じ位置になり、且つ、該第1平面が該第2平面と同一平面上となる補正量を算出し、該算出した補正量に基づいて、動作ポイントが教示された基準座標を補正する教示ライン補正部とを備える。
(もっと読む)
情報処理方法及び装置並びにプログラム
【課題】マニュピュレータを対象物まで短時間で移動させること。
【解決手段】対象物であるボルト穴を視認可能なカメラが取り付けられたマニュピュレータを、複数の対象物まで移動させる制御を行う装置が、複数の対象物の各々の位置に対応させて予め設定された目標位置TPi’に向けて、マニュピュレータを移動させるティーチングプレイバック制御を実行する(ステップS3)。装置は、マニュピュレータが目標位置TPi’に移動した場合、目標位置TPi’に対応する実穴位置Hiについての実誤差量diを検出する(ステップS5)。装置は、実誤差量d1乃至diの履歴のうち、少なくとも1回分の履歴を用いて、次のi+1回目の目標位置TPi+1’を更新する(ステップS10,S12,S13)。
(もっと読む)
回転絶対位置センサを較正するためのシステムおよび方法
【課題】回転絶対位置センサを較正するためのシステムおよび方法を提供する。
【解決手段】システムは、ロータリデバイスと、ロータリデバイスの位置データを表すエンコードされた電圧信号の対を生成する回転絶対位置(RAP)センサと、ホストマシンと、アルゴリズムを備える。このアルゴリズムは、エンコードされた電圧信号の対としての回転位置を測定するステップ、エンコードされた対により画定される楕円を線形写像して、較正パラメータを計算するステップ、較正パラメータを使用してロータリデバイスの絶対位置を計算するステップを含む。較正パラメータは、正の定符号のマトリクスと、楕円の中心点とを含む。電圧信号は、ロータリデバイスの回転角度のエンコードされたサインおよびコサインを含んでよい。
(もっと読む)
キャリブレーション装置及びキャリブレーション方法
【課題】視覚センサを用いてロボットをキャリブレーションする場合に、構成が簡単で正確かつ容易にキャリブレーションが可能なキャリブレーション装置及びキャリブレーション方法を提供すること。
【解決手段】アーム部と、前記アーム部の位置及び姿勢を検出する位置検出手段と、前記アーム部の位置及び姿勢を制御する制御部60とを備えたロボット5のキャリブレーション装置2であって、基準平面部に面内の方向を特定する複数の交差する溝部が形成され、前記溝部のうち交差する2つの溝部のそれぞれの側壁が接続される稜線が前記基準平面部に形成する角部のうち3つを校正点として有するキャリブレーション治具40と、視覚センサ12により撮像した前記キャリブレーション治具40の画像に基づき前記キャリブレーション治具40の位置及び姿勢を認識する物体認識装置10とを備えることを特徴とする。
(もっと読む)
ロボットの制御装置
【課題】ロボット座標上での位置および姿勢を計算しなくとも、実際のロボットの動作時に、教示点を通過する移動軌跡を生成でき、しかも、アームがひっくり返るといった事態を避けるためのロボットの形態チェックをしなくとも済む。
【解決手段】各アームの軸値(回転角)が決まればロボット先端の位置および姿勢は一義的に定まる。これにより、実際にロボットを動作させる際に、前もって連続移動軌跡を求め、求めた連続移動軌跡上の各点のアームの回転角を、教示点でのアームの回転角と比較して教示点に最も近い近傍点を探索する。近傍点が教示点から離れていた場合、教示点を補正し、補正後の教示点を用いて再度連続移動軌跡を軸値で求める。実際にロボットを動かすときには、軸値で求めた連続移動軌跡によりロボットの動作を制御する。
(もっと読む)
ロボット制御装置
【課題】ワーク形状を検出するセンサによって作業ツールを倣い補正するときに、進行方向に発生する位置誤差を抑制することができるロボット制御装置の提供。
【解決手段】予め設定された教示軌道および移動速度を入力として作業ツールTを移動させるための計画補間点Knを算出する補間点算出手段13を備え、ワークWの形状を認識するセンサLSからの入力に基づいて計画補間点Knを補正するための修正補間点Snを算出し、作業ツールTを修正補間点Snに順次移動させるロボット制御装置RCにおいて、補間点算出手段13は、作業ツールTが修正補間点Snに到達するたびに、教示軌道方向の移動量比率およびこの移動量比率に基づく修正移動速度を算出する。さらに、修正移動速度および教示軌道の残移動量を入力として計画補間点Knを再算出することによって、作業ツールTの進行方向に発生する位置誤差を抑制する。
(もっと読む)
アーク溶接ロボットおよびそのウィービング方法
【課題】装置コストの高騰を招来することなく、ウィービング動作時におけるトーチ先端位置の位置決め精度を向上させる。
【解決手段】旋回軸J1、第1揺動軸J2および第2揺動軸J3からなるアーム軸の3軸を含む少なくとも6自由度を有する多関節ロボットの各軸J1〜J6を用いて溶接トーチ7のトーチ先端を溶接線に沿って移動させると共に、トーチ先端を所定の周波数で溶接線に対して左右に周期的に揺動させるウィービング動作を行うときに、ウィービング動作によるアームの先端部20aの移動量が最小となるように溶接トーチ7の、該溶接トーチ7の中心軸に対する回転角度であるトーチ回転角を、多関節ロボットの各軸J1〜J6を用いて変化させるウィービング方法により溶接を行う。
(もっと読む)
111 - 120 / 392
[ Back to top ]