
国際特許分類[B25J9/10]の内容
処理操作;運輸 (1,245,546) | 手工具;可搬型動力工具;手工具用の柄;作業場設備;マニプレータ (16,135) | マニプレータ;マニプレータ装置を持つ小室 (9,248) | プログラム制御マニプレータ (1,513) | マニプレータ要素の位置決め手段に特徴のあるもの (394)
国際特許分類[B25J9/10]の下位に属する分類
電気的なもの (2)
流体的なもの
国際特許分類[B25J9/10]に分類される特許
11 - 20 / 392
ロボットのツールパラメータの補正方法
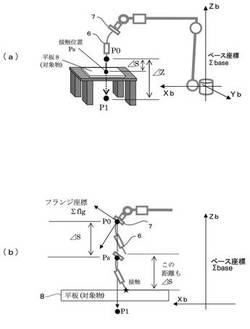
【課題】簡便なロボットの動作によって、作業者の熟練度や技量などに因らず短時間で精度よく、ツールパラメータを補正する方法を提供する。
【解決手段】溶接ロボット2のアーム先端に設けられるフランジ部7に取り付けられた溶接ツール6の先端位置を決定するツールパラメータを導出する方法において、溶接ツール6に3つ以上の姿勢角をとらせ、各姿勢角において溶接ツール6の先端点Pを基準面である平板8までベース座標系における一Zb方向に移動させる。その上で、各姿勢角において、溶接ツール6の先端点Pが平板8に到達したときの先端点Pの位置ずれ量を計測して並進成分変化量を求め、当該求めた並進成分変化量を基にツールパラメータを補正する。
(もっと読む)
部品製造ラインの設計支援方法及び設計支援システム

【課題】部品製造装置と、該部品製造装置に対してワークを搬入及び/又は搬出するロボットとが備えられた部品製造ラインにおいて、前記部品製造装置の周辺設備等との干渉を回避しながら、前記ロボットの搬送能力を有効に活用して、生産性を向上させる。
【解決手段】ロボットのアーム先端部に設定された基準点の移動経路を規定するための必要最小限の制御点を設定する制御点設定工程と、前記部品製造装置に対してワークを搬入及び/又は搬出する際に、該部品製造装置の周辺設備との干渉を生じない該装置内でのワークの配置領域を規定するSPM曲線を作成するSPM曲線作成工程と、前記制御点設定工程で設定した制御点と、前記SPM曲線作成工程で作成したSPM曲線と、成形対象のワーク形状とに基づき、該ワークを搬送する際のロボットの搬送モーションを決定する搬送モーション決定工程とを実行する。
(もっと読む)
ロボットシステム
【課題】ウィービングしながら溶接を行う場合でも、溶接品質が低下するのを抑制することが可能なロボットシステムを提供する。
【解決手段】このロボットシステム100は、ロボット1と、ロボット1により移動され、溶接線に対して溶接を行う溶接トーチ2と、溶接トーチ2により溶接線に基づく基準線を含む水平面を構成する基本座標系に基づいてウィービングしながら溶接を行うようにロボット1を制御するロボット制御装置3とを備えている。
(もっと読む)
キャリブレーション装置及びキャリブレーション方法
【課題】システム立ち上げ後におけるキャリブレーションの手間及び時間をシステム立ち上げ時より低減できるキャリブレーション装置を得ること。
【解決手段】キャリブレーション装置は、第2の記憶手段に記憶された3次元位置と3次元計測手段によりシステム立ち上げ後に取得された3次元位置とに基づいて、前記3次元計測手段の座標系に対する前記ロボットの座標系の相対的な位置関係のずれ量を推定する推定手段と、前記推定手段により推定されたずれ量を用いて、前記第2の記憶手段に記憶された2次元画像と前記2次元計測手段によりシステム立ち上げ後に取得された2次元画像との一致度を計算する計算手段と、前記計算手段により計算された一致度が閾値より小さい場合、前記推定手段により推定されたずれ量を用いて、前記第1の記憶手段に記憶された関連情報を補正する補正手段とを備えている。
(もっと読む)
時間最適アーム動作を生成する装置
【課題】シングル及びマルチアームロボットマニピュレータの単純及び合成移動に対して、追跡容易、即ち連続する加速度プロファイルを有する時間最適軌道の信頼性を呈し且つ効率の良い生成を行うシステムを提供すること。
【解決手段】ポイント(2及び3)間のシングルアームロボットに対する直線に沿う移動用の形状の汎用軌道を想定する。時間最適軌道は、所定の制約を犯さずに可能となる最短時間内で所定路に沿った選択されたエンドエフェクタの移動であり、位置、速度、加速度プロファイルのセットであり、特別な場合が最適中止軌道であり、これは、最短時間内で、移動するアームを完全休止状態に持っていく。システムは、各移動の軌道を互いに直交する成分に分解し、次に所定時間毎にこれらの成分を重畳することによって、単純移動を単一軌道に合成する行程も含む。この合成によって、円滑な搬送路に沿ったノンストップ移動が生じる。
(もっと読む)
ロボットシステム及び被作業物の製造方法
【課題】特異点の回避による不都合を生じさせることなく被作業物に対して作業を行うこと。
【解決手段】ロボットは、第1の回転軸A1を中心としてエンドエフェクタ(切断器具100)を回転可能に支持する第1アーム部と、第1の回転軸A1と直交する第2の回転軸を中心として第1アーム部を回転可能に支持する第2アーム部と、第2の回転軸と直交する第3の回転軸A3を中心として第2アーム部を回転可能に支持する第3アーム部とを備え、第1アーム部が、第2アーム部からの延在方向d1に対して垂直な向きに第1の回転軸A1を備える。そして、制御装置は、被作業物に対する連続的な作業をあらかじめ定められた軌跡に沿って行うようにロボットに対して指示する。
(もっと読む)
回転機構、産業用ロボットおよび回転体の原点位置復帰方法
【課題】支持体に対して360°以上かつ720°未満回転可能な回転体を短時間で確実に原点位置へ復帰させることが可能な回転機構を提供する。
【解決手段】回転体の原点位置を検出するための第1検出機構は、回転体に固定される第1被検出部60と、支持体に固定される第1検出部59とを備え、第2検出機構33は、支持体に取り付けられる揺動部材45と、揺動部材45を揺動させる係合部材48と、揺動部材45に固定される第2被検出部62と、支持体に固定される第2検出部61とを備えている。この回転機構では、回転体の回転範囲の1箇所または2箇所で、第1検出部59によって第1被検出部60が検出され、かつ、回転体の回転範囲の1箇所で、第2検出部61のオンオフが切り替わる。また、この回転機構では、回転体を原点位置へ復帰させるときに、まず、第2検出部61のオンオフが切り替わる位置まで回転体を回転させる。
(もっと読む)
ロボットの関節の原点補正方法およびそのシステム
【課題】高精度且つ安価にロボットの関節を原点補正する。
【解決手段】第1の姿勢P1(l)のロボット12のマーカー22が撮影画像に写る位置にカメラ16を設置する。各関節用のエンコーダの出力値に基づいて、原点補正対象の関節12lに予め対応付けされた関節のみを動かすことにより、カメラ16の撮影画像上において第1の姿勢時のマーカー22の位置の近傍にマーカー22が写るような第2の姿勢P2(l)に変更する。ロボット12の姿勢変更によるカメラ16の撮影画像上におけるマーカー22の変位に基づいて、原点補正対象の関節12lの原点補正を行う。
(もっと読む)
搬送装置
【課題】補正前の軌道の特性を損なうことなく、軌道の始点及び終点と目標始点及び目標終点との位置ズレに応じて設定軌道を補正する搬送装置を提供する。
【解決手段】予め設定された設定軌道Ptを用いて搬送制御するにあたり、設定軌道Ptの始点S及び終点Eが位置ズレしている場合に設定軌道Ptを補正する。設定軌道Ptの補正は、始点Sが目標点S’と一致するように終点Eを基準として設定軌道Ptを拡大又は縮小して補正する第一の補正処理と、第一の補正処理後の終点Eが目標点E’と一致するように第一の補正処理後の始点S’を基準として第一の補正処理で得られる軌道Pt’を拡大又は縮小して補正する第二の補正処理と、を実行することで行う。
(もっと読む)
ロボットの制御方法およびロボットの制御装置
【課題】目標位置におけるツールの向きを決定するための変数の値を設定する際におけるユーザの作業負担を軽減しつつ、ロボットの移動時間の短縮を図る。
【解決手段】ユーザにより、ツールの所定軸まわりの回転角度が任意変数として指定されると、コントローラは、その所定軸まわりの回転角度をコントローラ側で任意の値に設定可能な任意変数として設定する。コントローラは、ツールの先端が現在位置から目標位置に移動する際に要する移動時間と、移動後のツールの先端位置の目標位置に対する位置誤差とに基づく評価指標を設定し、その評価指標を最適化することで任意変数の値を決定する。コントローラにより上記各処理が実行されることにより、目標位置におけるツールの向きが、ロボットの移動時間が極力短くなるようなものに自動的に決定される。
(もっと読む)
11 - 20 / 392
[ Back to top ]