
国際特許分類[B25J9/10]の内容
処理操作;運輸 (1,245,546) | 手工具;可搬型動力工具;手工具用の柄;作業場設備;マニプレータ (16,135) | マニプレータ;マニプレータ装置を持つ小室 (9,248) | プログラム制御マニプレータ (1,513) | マニプレータ要素の位置決め手段に特徴のあるもの (394)
国際特許分類[B25J9/10]の下位に属する分類
電気的なもの (2)
流体的なもの
国際特許分類[B25J9/10]に分類される特許
51 - 60 / 392
曲面塗装装置
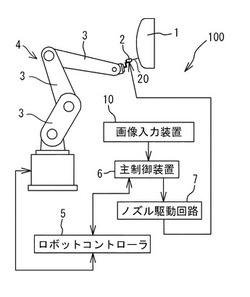
【課題】曲率が一定でない曲面の塗装面に対しても均一な厚みの塗膜が得られる曲面塗装装置を提供する。
【解決手段】曲面塗装装置100は、高速で塗料の吐出と吐出停止が切り替え可能で、且つ塗料の吐出時間と吐出停止時間の制御可能なノズル2と、ノズル2が取り付けられ、該ノズル2の塗料吐出口を被塗物1の塗装面に対向するように該ノズルの移動可能なロボットアーム4と、ロボットアーム4を制御するロボットコントローラ5と、ノズル2の塗料吐出時間と吐出停止時間の制御可能なノズル駆動回路7と、ロボットコントローラ5及びノズル駆動回路7を制御する主制御装置6とを備え、主制御装置6は、被塗物1の表面を仮想の三次元マトリクス面によって多数の微小塗面12に分解し、各微小塗面に対してノズル2の塗料吐出口が対向するようにロボットコントローラ5を制御すると共に、ノズル2が対向する微小塗面12の面積に応じた塗料の量を吐出するようにノズル駆動回路7を制御する。これにより、曲面の塗装面に対する塗膜の厚みを均一にする。
(もっと読む)
ロボット制御装置

【課題】多関節ロボット本体の制御において、軌道計算が複雑で計算の所要時間が不定であっても、複雑な軌道計算と、同期動作とを並行して実行する必要がある。
【解決手段】ロボット制御装置200は、共有メモリ203と、共有メモリ203にアクセス可能に接続された第1の処理部201及び第2の処理部202と、を備えている。第1の処理部201は、多関節ロボット本体を目標位置姿勢に動作させるコマンドから各アーム用モータに出力する指令値の連なりを示す動作指令データBを計算し、計算結果である動作指令データBを共有メモリ203に格納する軌道計算処理を行う。第2の処理部202は、共有メモリ203に格納された動作指令データBを取得して、指令値を各アーム用モータに一定の時間間隔で同期して出力する同期処理を行う。
(もっと読む)
ロボット制御装置、ロボット制御方法およびロボットシステム
【課題】ロボットにおける所定の部位があらかじめ定められた位置へ移動したことを示す通知信号の出力を適切に行うこと。
【解決手段】ベクトル算出部が、基準部位置における基準部の移動方向を示す第1のベクトルと、信号出力位置および基準部位置間の相対位置を示す第2のベクトルとを算出するようにロボット制御装置を構成する。また、信号出力判定部が、ベクトル算出部によって算出された第1のベクトルおよび第2のベクトルに基づいて通知信号を出力するか否かを判定するようにロボット制御装置を構成する。
(もっと読む)
座標系校正方法及びロボットシステム
【課題】ロボットの手先座標系と視覚センサのセンサ座標系の相対的な関係を記述する関連情報としてパラメータを容易に校正できる座標系校正方法を提供すること。
【解決手段】ロボット30のロボット座標系35に一つのマーク10を配置し、視覚センサ20を取り付けたロボット30の手先を移動させて、視覚センサ20の姿勢を変えずに平行移動させた少なくとも第1から第3の3箇所の観測箇所と、マーク10に対して第1から第3の3箇所の観測方向と異なる方向でかつ相互に異なる方向からマーク10を臨む少なくとも第4及び第5の観測箇所で、マーク10の観測を行い、各観測箇所の画像を画像処理してマーク位置認識データを得て、各観測箇所でのロボット30の姿勢データとマーク位置認識データとを対応づけて取得し、両データに基づいて関連情報を校正する。
(もっと読む)
ロボット制御装置
【課題】モーターの性能をより多く引き出すことが可能なロボット制御装置。
【解決手段】モーターパラメーター記憶手段40と、慣性モーメント計算手段10と、移動距離計算手段20と、速度指令曲線計算手段30と、速度指令曲線計算手段30により生成された速度指令曲線に従ってモーター72を制御するモーター制御装置60と、を備えるロボット制御装置75であって、モーター72の内部温度を測定するモーター温度測定手段50をさらに備えており、モーターパラメーター記憶手段40は、内部温度によって変動する可変パラメーターについては許容最大値よりも低い内部温度下で使用された場合の増大する方向に補正されたモーターパラメーターを含めて記憶しており、速度指令曲線計算手段30は、補正されたモーターパラメーターを用いて速度指令曲線310を生成するロボット制御装置75。
(もっと読む)
アーク溶接ロボット制御装置
【課題】
作業プログラムの教示修正時に、教示データ或いは溶接区間に応じて最適な座標系が自動設定されることにより、教示修正における座標系選択に必要な操作を低減することができるアーク溶接ロボット制御装置を提供する。
【解決手段】
ロボット制御装置RCは、マニピュレータ10を手動操作するためのテーブル座標系Cw、溶接線座標系を作業プログラムに関連付けて記憶する。ロボット制御装置RCは、作業プログラムの教示修正時にマニピュレータ10を手動操作するティーチペンダントTP、及び、教示修正時に作業プログラムと関連付けされたテーブル座標系Cw、溶接線座標系を自動設定する。ロボット制御装置RCは、教示修正時に、ティーチペンダントTPによる操作指令があったとき、設定したテーブル座標系Cw、溶接線座標系でマニピュレータ10を制御する。
(もっと読む)
ロボット制御システムのカメラ座標系とロボット座標系の結合方法、画像処理装置、プログラム、及び記憶媒体
【課題】
ハンドリングロボットに認識対象治具を把持する際に正確に把持させる必要が無く、認識対象治具を把持させた状態で、回転及び直線移動させたときの連続画像からハンドツールのツール軸中心と、ロボット座標系とカメラ座標系の傾きを簡単に得ることができるカメラ座標系とロボット座標系の結合を得る方法、画像処理装置を提供する。
【解決手段】
ロボットのハンドツールに保持された認識対象治具の回転動画像からフレーム差分を得て、該フレーム差分に基づく認識対象治具の特徴部位に関する複数の特徴点が含まれる円弧軌跡からカメラ座標系のツール軸中心の位置を算出する。ロボット座標系のX軸に平行に直線移動させた際の認識対象治具の直線移動動画像からフレーム差分を得て、該フレーム差分に基づく認識対象治具の特徴点の直線軌跡からカメラ座標系に対するロボット座標系の傾きを算出する。
(もっと読む)
ロボットの制御装置
【課題】ロボットをより高速で動作させるための制御パターンを取得する制御装置において、その実用性を向上させる。
【解決手段】制御装置20は、ロボットのアームを第1姿勢と第2姿勢との間で駆動して、各サーボモータ31において速度、加速度、及び供給される電流の各連続値を検出する。各モータ31において所定の期間毎に、上限値に対する電流値の比率である電流比を算出する。所定の期間毎に、各モータ31の電流比のうち最大電流比を選択し、この最大電流比の逆数に基づいて各モータ31の修正加速度を算出する。修正加速度と各モータ31の速度とに基づいて、各モータ31における修正速度を繰り返し算出する。修正速度と各モータ31の回転位置とに基づいて、各モータ31における修正回転位置を繰り返し算出する。第1姿勢側から算出された修正速度と、第2姿勢側から算出された修正速度とに基づいて、修正後の速度変動パターンを設定する。
(もっと読む)
多関節ロボットアーム型搬送装置の軌道情報生成装置
【課題】始点から終点までの搬送対象物を直線移動させるにあたり、移動時間の短縮と振動の低減とを両立した軌道情報生成装置を提供する。
【解決手段】多関節ロボットで搬送対象物を直線移動させるにあたり、搬送装置103の動力学モデルに基づいて始点Sから終点Eまでの移動に要する時間teをパラメータの一つとして含む評価関数の値が最小となるように最適化手法を用いて軌道情報132を生成する。動力学モデルとして搬送対象物Wを搬送する先端リンクの動作を直線動作に限定したモデルを予め設定しておき、予め設定された搬送装置の振動特性を用いて先端リンクの移動により生じる模擬振動の大きさ(x−xa)を算出し、算出した模擬振動の大きさ(x−xa)をパラメータの一つとして評価関数に含め、少なくとも上記2つのパラメータである移動時間te及び模擬振動の大きさ(x−xa)を含む評価関数の値が最小となるように軌道情報132を生成する。
(もっと読む)
円滑経路生成装置および円滑経路生成方法
【課題】動作経路から余分な動作を削減して円滑な動作経路を再生成する。
【解決手段】動作経路記憶手段と、経路途中点設定手段と、経路途中点記憶手段と、経路途中点のうち対となる一の経路途中点、および他の経路途中点からなる経路途中点対を採択する経路途中点対採択手段と、一の経路途中点と他の経路途中点との中間点を、計算式(一の経路途中点の位置データ+他の経路途中点の位置データ)/2から求める中間点演算手段と、中間点が障害物と干渉するかどうかを判断する中間点干渉チェック手段と、を備え、中間点が障害物と干渉する場合には、現在のままの動作経路を採択し(S7)、干渉しない場合には、当該中間点を新経路途中点として採択し、一の経路途中点から当該新経路途中点を通って他の経路途中点まで進む新動作経路に変更する円滑経路生成ステップを実行(S6)する円滑経路生成装置。
(もっと読む)
51 - 60 / 392
[ Back to top ]