
国際特許分類[B25J9/10]の内容
処理操作;運輸 (1,245,546) | 手工具;可搬型動力工具;手工具用の柄;作業場設備;マニプレータ (16,135) | マニプレータ;マニプレータ装置を持つ小室 (9,248) | プログラム制御マニプレータ (1,513) | マニプレータ要素の位置決め手段に特徴のあるもの (394)
国際特許分類[B25J9/10]の下位に属する分類
電気的なもの (2)
流体的なもの
国際特許分類[B25J9/10]に分類される特許
71 - 80 / 392
ロボット、ロボットの駆動方法
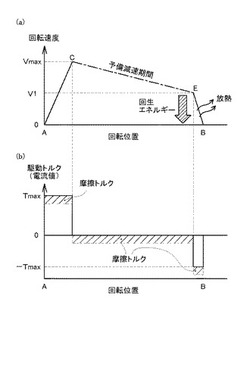
【課題】回生エネルギーの発生を抑制してロボットの全体としての生産性を向上させる。
【解決手段】ロボットの可動部を目標位置に向けて加速し、目標位置の手前で制動力を作
用させて可動部を減速させることで目標位置に停止させる。更に、可動部に制動力を作用
させるに先立って、停止時の制動力よりは小さな制動力を作用させることにより、可動部
を緩慢に減速させる予備減速を行う。こうすれば、可動部の移動速度が低下した状態から
停止させることができるので、停止時に発生する回生エネルギーを抑制することができる
。その結果、ロボット全体としてのエネルギー効率が改善されるので生産性を向上させる
ことが可能となる。
(もっと読む)
ロボットの軌道計画システム及び軌道計画方法

【課題】ロードマップを用いて軌道計画を行う場合に、複雑な環境下でも指定されるタスクに応じた軌道計画を実現可能とし、かつ、軌道算出可能性を保証しつつ軌道計画に要する処理コストを低減可能とする。
【解決手段】ロボットの軌道計画システム20は、タスク種類と、初期姿勢と、最終姿勢と、に応じて構成された複数のノードがそれぞれ登録された複数のロードマップを記憶するロードマップ記憶部21と、入力されるタスク種類と、入力される初期姿勢及び最終姿勢と、から、対応するロードマップIDを特定するロードマップ選択器22と、周辺の環境情報を取得する環境情報取得器23と、ロードマップIDから対応するロードマップを特定して、入力される初期姿勢及び最終姿勢と、環境情報と、から、軌道を計画する軌道計画器24と、を備える。
(もっと読む)
冗長マニピュレータの冗長自由度の決定方法
【課題】冗長マニピュレータ1の手先8をCP制御にて変化させるに際し、アームアングルψの連続性を担保する技術を提供する。
【解決手段】制御装置100は、各ステップにおける手先8の位置及び姿勢状態を取得する状態取得手段20と、各ステップにおける手先8の位置及び姿勢状態に基づいて、各ステップにおけるアームアングルψの実現可能な領域を算出する領域算出手段21と、隣り合うステップ間で領域同士が少なくとも一部重複するように、ステップs0からステップsnに至る間の領域の組み合わせを作成する組み合わせ作成手段22と、領域の組み合わせに基づいて、CP制御の各ステップにおけるアームアングルψを決定する冗長自由度決定手段23と、を備える。
(もっと読む)
6軸ロボットの6軸原点位置較正方法、6軸ロボットの制御装置、7軸ロボットの7軸原点位置較正方法及び7軸ロボットの制御装置
【課題】大型の検出器具を設置したりする必要がなく、6軸ロボットについて6軸の原点位置を適切に較正できる6軸ロボットの6軸原点位置較正方法を提供する。
【解決手段】設置面に、上方に位置する測定対象物との距離を測定するレーザー計測器を設置し、6軸の軸心に測定板を取り付ける。そして、6軸ロボットの2軸を1軸の軸心に対して90度回転させ、4軸の軸心が1軸の軸心と平行となるように3軸を前記設置面の方向に回転させ、6軸の軸心が前記設置面と平行となるように5軸を回転させた姿勢を取らせた状態で、測定板の一端側が第1計測点となるように位置させると(S1)、レーザー計測器により第1計測点までの第1距離L1を測定する(S2)。次に1軸を回転させて、測定板の他端側が第2計測点となるように位置させ(S3)、レーザー計測器により第2計測点までの第2距離L2を測定すると(S4)、6軸の誤差角度Δθ6を(1)式で求め(S5)、誤差角度Δθ6を用いて6軸の原点位置を較正する(S6)。
(もっと読む)
ロボット装置、ロボット装置の制御方法およびプログラム
【課題】従来のロボット装置の制御方法にあっては、制御装置における演算量が多くなり処理に時間が掛かったり、処理速度を上げるために制御装置のコストが増加したりする問題があった。
【解決手段】アクチュエーターの角度センサーの回転角度検出データより、前記角度センサーを備える前記アクチュエーターによって動作する前記アームの角速度を演算する第1演算部と、前記第1演算部の演算対象の前記アクチュエーターを含む連結装置を介して連結される前記アームに備える慣性センサーの角速度検出データより、前記連結装置を軸とする前記アームの角速度を演算する第2演算部と、低周波成分を除去した、前記アクチュエーターと前記アームとの間のねじれ角速度を演算する第3演算部とを備えるロボット装置。
(もっと読む)
ロボットシステムおよびロボット制御方法
【課題】
ロボットアーム先端の3次元空間の位置誤差および姿勢誤差を補正する。
【解決手段】
ロボットの動作領域内に予め定めた直方体領域について、オフラインにおける直方体領域の8頂点の理論座標値と、オンラインにおける前記8頂点の実測座標値とから、前記直方体領域内におけるオフラインでの座標値をオンラインでの座標値に補正する座標値補正係数を演算し、前記直方体領域内におけるオフラインでの姿勢をオンラインでの姿勢に補正する角度補正係数を演算し、前記直方体領域内のオフラインで教示された位置および姿勢を前記座標値補正係数と前記角度補正係数とを用いて補正し、補正した位置および姿勢を用いて前記ロボット先端の位置および姿勢を制御する。
(もっと読む)
ロボットの角度データ変換方法及びこの方法を実施するための制御装置
【課題】ロボット交換時におけるデータ設定の誤りを防ぐ。
【解決手段】交換前のロボットが制御装置に接続された状態で、補助記憶装置に記憶された交換前ロボットの幾何学的誤差データを制御装置の主記憶装置にロードし、かつ幾何学的誤差データに付記されたID情報と交換前ロボットのID情報とを照合し(S101)、次にロボットを制御装置から外して交換し(S102)、交換後ロボットが制御装置に接続された状態で、補助記憶装置に記憶された交換後ロボットの幾何学的誤差データを主記憶装置にロードし、かつ幾何学的誤差データに付記されたID情報と交換後ロボットのID情報とを照合し(S103)、交換前及び交換後のロボットの幾何学的誤差データを反映したツール先端位置間の誤差が十分小さくなるように動作プログラムに含まれる角度データを変換し、変換された角度データを含むように動作プログラムを上書き保存する(S104)、工程を備える。
(もっと読む)
水平多関節ロボットの座標値補正方法
【課題】高精度な水平多関節ロボットを実現する。
【解決手段】水平多関節ロボット10の座標値補正方法は、ガラスマスク80に設けられた基準マークP1,P2,P3位置をCCDカメラ40で画像認識して作用点の基準となるU軸中心を測定し、基準マークP1,P2,P3とU軸とが一致するまで第1アーム50と第2アーム60とを旋回させて、その移動量からロボット座標に対するガラスマスク80の傾きを算出し、ガラスマスク80の傾きを考慮して少なくとも2箇所の基準ロボット座標を算出し、前記基準ロボット座標に一致するまで前記U軸を旋回移動させてモデルポイントを作成し、そのときのロボット座標とモデルポイントとの座標差を算出し、この座標差を用いてアーム長誤差(ΔL1,ΔL2)と組み付け角度誤差(Δθ1,Δθ2)からU軸の座標補正値を算出し、座標補正値に基づきU軸の指令座標値を補正する。
(もっと読む)
アークセンサにおける狙い位置修正方法及びロボット制御システム
【課題】
狙い位置を手動により調整する機能を複数パスの連続溶接に適用することができるアークセンサにおける狙い位置修正方法及びロボット制御システムを提供する。
【解決手段】
先に行われる教示パスにおいて、ティーチペンダント40又は手動狙い調整器70により狙い位置の調整が行われた場合、その調整結果を後の教示パスで利用するか否かをティーチペンダント40により設定する。調整結果を利用すると設定された場合、後に行われる教示パスではCPU22は調整結果に基づいて内部オフセット値を更新すると印加電圧及び更新後の内部オフセット値に基づいてマニピュレータ10を移動制御する。調整結果を利用しないと設定された場合、後に行われる教示パスではCPU22はアークセンサユニット50が検出した印加電圧に基づいて、マニピュレータ10を移動制御する。
(もっと読む)
ロボットの位置情報復元装置および位置情報復元方法
【課題】モータ交換等により無効となったセンサ信号による位置情報を容易に有効化する。
【解決手段】モータ駆動により支持部材31に対して回動可能な可動部材32を有するロボット1において、支持部材31と可動部材32との位置関係を表す視覚マーク30を設け、モータ交換の前後において、それぞれカメラ4により視覚マーク30を撮影するとともに、カメラ4からの画像信号に基づいてモータ交換の前後の視覚マーク30の位置関係が同一の位置関係となるようにサーボモータMを制御する。これらモータ制御後のセンサ信号に対応した軸角度θref-n,θref-n’に基づいて、モータ交換後のセンサ信号による軸角度θnを補正する。
(もっと読む)
71 - 80 / 392
[ Back to top ]