
国際特許分類[B25J9/10]の内容
処理操作;運輸 (1,245,546) | 手工具;可搬型動力工具;手工具用の柄;作業場設備;マニプレータ (16,135) | マニプレータ;マニプレータ装置を持つ小室 (9,248) | プログラム制御マニプレータ (1,513) | マニプレータ要素の位置決め手段に特徴のあるもの (394)
国際特許分類[B25J9/10]の下位に属する分類
電気的なもの (2)
流体的なもの
国際特許分類[B25J9/10]に分類される特許
91 - 100 / 392
多関節型ロボットの速度指令プロファイルの生成方法
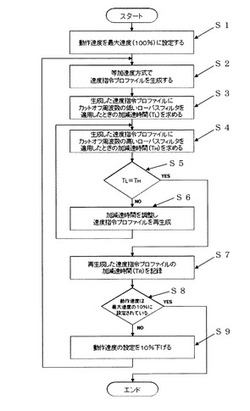
【課題】カットオフ周波数の高いローパスフィルタを適用したときに停止振動を低減するためには、カットオフ周波数の低いローパスフィルタを適用したときと同等の減速時間を持たせられるような加減速特性を実現し、停止振動が発生し難い長い減速時間を持った速度指令プロファイルを生成する必要がある。
【解決手段】プログラムで指定された動作速度によらず加速度が常に一定となる手法により生成した速度指令プロファイルにカットオフ周波数の低いローパスフィルタを適用したときの減速時間と、前記速度指令プロファイルに前記ローパスフィルタよりもカットオフ周波数が高いローパスフィルタを適用したときの減速時間とが、同等になるようにして求められた加減速特性を用いて生成した速度指令プロファイルに、前記カットオフ周波数の高いローパスフィルタを適用したときの速度指令プロファイルを求める。
(もっと読む)
ロボット制御装置の補正パラメータ同定装置

【課題】減速機角度伝達誤差によるうねりを補正する。
【解決手段】ロボットの手先部に発生するうねりの振幅を求める手段と、複数の関節の所定の関節Jiに対応するうねりの振幅値Diを求める手段と、所定の関節Jiをモータの位置指令θrefiで単軸動作させた際に、関節の軸に現れる位置フィードバック信号Biを計測する手段と、関節Jiに対する位置指令値θrefiに振幅Cのうねりを重畳的に加え、更に、他の軸Jxに位置指令θrefxが加えたと仮定した場合に、手先位置において発生するうねりC’iを計算する手段と、Ai=(Ci/C’i)×Diという式に従って、Biに対応するAiを求める手段と複数のロボットに対して、以上の各手段を用いて、Biに対応するAiを求める手段とを備える、ロボット制御装置の補正パラメータ同定装置。
(もっと読む)
ロボットのツールベクトルの導出方法及び較正方法
【課題】簡便に短時間にしかも精度よくロボットのツールパラメータ(Tx,Ty,Tz,α,β,γ)、特にツールパラメータの中の並進成分(Tx,Ty,Tz)であるツールベクトルを導出する方法を提供する。
【解決手段】本発明に係るロボットのツールベクトルの導出方法は、ロボット2のアーム先端に取り付けられたツール6の先端位置を決定するツールベクトルを導出する方法であって、ロボット2のツール6の先端が空間上の所定点の近傍に位置するように、ロボット2に対して3つ以上の姿勢をとらせ、各姿勢におけるツール6の先端の位置ずれ量である実績位置ずれ量を計測し、計測された実績位置ずれ量を基にツールベクトルTを算出する。
(もっと読む)
自動溶接装置
【課題】 枝管と母管の溶接個所を溶接トーチで正確に溶接する。
【解決手段】 ロボットハンド12の先端部の旋回台13に、馬蹄型ガイド5と円周動作する溶接トーチ11を備えた枝管溶接機4を取り付け、その反対側に探触子14を設ける。ロボットコントローラ19に、探触子14に接続したタッチセンサ16の接触検出信号を入力可能とし、更に外部の制御装置20を接続する。ロボットコントローラ19で多関節ロボットを制御して枝管溶接機4の馬蹄型ガイド5を溶接対象の枝管2aに外嵌させるときに、制御装置20により、馬蹄型ガイド5と予め探触子14で検出した溶接対象の枝管2aの位置のずれ量を求め、このずれ量を解消するための馬蹄型ガイド5の位置補正量を求めてロボットコントローラ19へ与えることで、馬蹄型ガイド5を外嵌させた溶接対象の枝管2aを、溶接トーチ11の円周動作の軌道の中心に配置させる。
(もっと読む)
産業用ロボットのアームの基準位置決め方法、及び産業用ロボット
【課題】揺動アームと揺動アームに対して回転駆動可能に取り付けられたツール取付回転アームとの基準位置を簡単な構成で、精度よく位置決めできる産業用ロボットのアームの基準位置決め方法を提供する。
【解決手段】ツール取付回転アーム160の所定位置に設けられた取付部170に揺動アーム150側に向けて光ビームLBが出射されるように発光装置320を取り付け、発光装置320から光ビームLBを出射させ、取付部170に対向する揺動アーム150の所定位置に設けられ、発光装置320からの光ビームLBを受光する受光部410の許容範囲に発光装置320からの光ビームLBが照射されるように揺動アーム150とツール取付回転アーム160とを位置決めすることを特徴とする。
(もっと読む)
ロボットアーム位置補正パラメータの同定装置及び方法、並びにそれを用いたロボットコントローラ及びロボット制御方法
【課題】ロボット個体毎に適用可能な、自動処理による簡便なロボット位置補正パラメータ同定方法及び装置を提供する。
【解決手段】本発明は、各関節部のモータと、モータに連結された減速機と、減速機に連結されるロボットアームとを備えるロボットにおいて、手先位置の軌跡誤差を補正するために、各モータへの角度指令に加算される補正値のパラメータを同定する装置であり、該モータへのトルク指令が最大となるリンク角度において最大値をとるトルク指令と同一周期の正弦波の位相に基づいて補正値の位相パラメータを同定し、且つ、同定された位相パラメータ及び任意の振幅パラメータを用いて計算される補正値と角度指令との合計に対する順運動学計算から得られるロボットの手先位置と現在の手先位置との差分につき動作時間内での積分値を計算し、該積分値が最小となる振幅パラメータを補正値の振幅パラメータとして同定する手段を備える。
(もっと読む)
溶接ロボットの制御装置
【課題】 基本3軸などのイナーシャの大きい軸を使用することなくイナーシャの小さい軸のみを使用してウィービング動作させるようにすることで、高い軌跡精度、高い周波数でウィービングを行うことができるようにするとともに、ウィービング動作する平面の制限をなくし任意のトーチ姿勢でウィービング動作させるようにすることで、ワークとの干渉を防止し煩わしい教示作業を不要とする。
【解決手段】 溶接ロボットの手首3軸のうち、最先端の軸を除く直交する直交2軸によって溶接トーチ先端が動く平面に対して垂直な方向に溶接トーチ先端を移動させ得るウィービング軸が、溶接ロボットに追加される。コントローラは、ウィービング移動量を、直交2軸およびウィービング軸それぞれの駆動量に変換する。直交2軸およびウィービング軸をそれぞれ、変換された対応する駆動量だけ駆動させる駆動指令を溶接ロボットに与えることで、当該溶接ロボットをウィービング動作させる。
(もっと読む)
ロボットの制御装置及びロボットの位置修正制御方法
【課題】ロボット本体の手先の教示点の修正が、アーム全体について意図しない動作を生じさせることを回避できるロボットの制御装置を提供する。
【解決手段】制御装置は、ティーチチェックモードの実行停止時点に実行中であった制御プログラム中の命令を判定し、当該命令が動作命令MOVEであれば当該動作命令を、動作命令MOVEでなければ直近に実行された動作命令MOVEを対象として、その時点の手先位置が動作命令MOVEの目標位置に一致しているか否かを判定する(S8,S9)。手先位置と目標位置とが一致していない場合は(S9:NO)、以降に行われるユーザの修正操作に応じた手先位置の修正制御を行い(S16)、手先位置と目標位置とが一致している場合は(S9:YES)、以降に行われる手先位置の修正制御に制限を付与する制限付き修正制御を行う(S10〜S12)。
(もっと読む)
学習制御ロボット
【課題】本発明は、学習制御機能を持つロボットの学習稼動の動作中、もしくは学習後の実稼動の動作中に例外処理が起きた場合に対処可能な学習制御ロボット及び再学習可能な学習制御ロボットを提供することを目的とする。
【解決手段】本発明の学習制御ロボットは、ロボット機構部と、作業プログラムを実行することにより、ロボット機構部の位置偏差に関するデータを取得して、ロボット機構部の位置偏差を所定の値以下とするための学習補正量を計算する学習制御を実行する学習制御部と、学習制御の実行中に、データを取得するためにロボット機構部の学習稼動を実行し、学習制御の実行後に、学習制御部が計算した学習補正量に基づいて、ロボット機構部の実稼動を実行する通常制御部と、学習稼動の実行中又は実稼動の実行中において例外処理が起きた場合に、例外対処を実行する例外対処部と、を有することを特徴とする。
(もっと読む)
教示点補正装置及び教示点補正方法
【課題】対象ワークの設置誤差に加えて形状誤差をも考慮した上で、作業ロボットの教示点を補正することのできる教示点補正装置及び教示点補正方法を提供する。
【解決手段】作業ロボット1に予め設定された基準教示点を、作業対象となる対象ワーク30bの状況に応じて補正する教示点補正装置である。教示点補正装置は、基準ワーク30a及び対象ワーク30bに設定された特徴点の位置と、基準ワーク30a及び対象ワーク30bの断面形状との計測が可能な2次元変位センサ3と、基準ワーク30aの特徴点の位置と対象ワーク30bの特徴点の位置とを比較することによって対象ワーク30bの設置誤差を演算すると共に、基準ワーク30aの断面形状と対象ワーク30bの断面形状とを比較することによって対象ワーク30bの形状誤差を演算する演算部5と、設置誤差及び形状誤差に基づいて基準教示点を補正する補正部6と、を備えている。
(もっと読む)
91 - 100 / 392
[ Back to top ]