
国際特許分類[B25J9/10]の内容
処理操作;運輸 (1,245,546) | 手工具;可搬型動力工具;手工具用の柄;作業場設備;マニプレータ (16,135) | マニプレータ;マニプレータ装置を持つ小室 (9,248) | プログラム制御マニプレータ (1,513) | マニプレータ要素の位置決め手段に特徴のあるもの (394)
国際特許分類[B25J9/10]の下位に属する分類
電気的なもの (2)
流体的なもの
国際特許分類[B25J9/10]に分類される特許
131 - 140 / 392
自動作業システムにおける位置ズレ補正方法及び位置ズレ補正プログラム
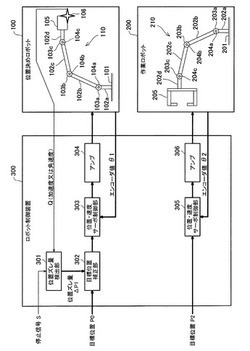
【課題】位置決めロボットと作業ロボットとの協調作業の際に生じ得る位置ズレを検出して補正する。
【解決手段】アームの先端部位に保持ツール105及び慣性センサ106を具備する位置決めロボット100と、アームの先端部位に作業ツール205を具備する作業ロボット200と、ロボット制御装置300と、を有した自動作業システムにおいて、位置決めロボット100によりワークを保持した保持ツール105をワークの作業位置に応じた保持ツール105の位置決め基準位置P0に搬送して位置決めするとともに、作業ロボット200により当該ワークに対し所定の作業を行う際、ロボット制御装置300は、慣性センサ106の慣性力に基づいて保持ツール105の位置決め基準位置P0からの位置ズレ量ΔP1を検出し、検出した位置ズレ量ΔP1に基づいて保持ツール105の位置決め基準位置を位置ズレ前の位置P0に補正する。
(もっと読む)
ロボット制御装置及び方法

【課題】補正された位置姿勢値を一意の各軸値に逆変換できない特異点において、ロボットの位置決め精度を向上する。
【解決手段】
コントローラ2は、補正された位置姿勢指令値をロボット7の各関節駆動軸の回転量を表す各補正軸指令値に逆変換できるか否かを判断し、逆変換できるときに、補正位置姿勢指令値を各補正軸指令値に逆変換し、各補正軸指令値から補正前の各軸指令値を減算することにより各関節駆動軸の補正値を算出してメモリ3に格納する一方、逆変換できないときに、制御タイミングの直前の少なくとも1つの制御タイミングにおいてメモリ3に格納された各補正値に基づいて各関節駆動軸の推測補正値を算出し、各推測補正値を補正前の各軸指令値に加算することにより各補正軸指令値を算出するとともに、各推測補正値を各補正値としてメモリ3に格納する。
(もっと読む)
ロボットの制御装置及びロボットの制御方法
【課題】補正を行うためのセンサを必要とせずに、制御精度を向上させることができるロボットの制御装置を提供する。
【解決手段】制御に伴う演算の結果より把握されるアーム6の手先位置を基準に手先移動量を決定すると、移動先の目標位置を決定する。目標位置はアーム6の各軸目標回転角度に変換され、目標回転角度はエンコーダ9が出力するパルス数相当の指令値に変換される。その指令値に応じてモータ5を駆動制御し、エンコーダ9が出力するパルス数が回転角度に変換されると、変換された回転角度と目標回転角度との差分を求め累積する。変換された回転角度は位置にも変換され、位置誤差蓄積部32はその位置と目標位置との差分を求め累積する。累積された位置誤差量が指示可能な移動量の最小単位以上あれば、最小単位で除した商を手先移動量に加算してモータ5に出力し、剰余を位置誤差蓄積部32に格納して累積値を更新し、累積されている角度誤差量をゼロクリアする。
(もっと読む)
ロボット制御装置
【課題】摩擦補償を適切に行うことでロボットの実際の動作軌跡をより理論に近づける。
【解決手段】ロボット制御装置3は、モータ軸側ギアと出力軸側ギアとが停止しており且つ弾性変形量がゼロである状態から出力軸を目標駆動方向に駆動させる場合に、モータ軸側ギアに印加する目標駆動方向への摩擦補償用トルクを徐々に増加させ、弾性変形量が最大弾性変形量に到達した以後では弾性変形量が最大弾性変形量に到達した時点での摩擦補償用トルクを一定値として印加する。
(もっと読む)
ツールセンタポイント調整方法
【課題】ツールセンタポイントの座標位置の調整を短時間でかつ効率良く行うこと。
【解決手段】各運動軸C1,C2,C3をツールセンタポイントVPを支点にして円運動させつつ、実際のツールセンタポイントの停止を視認できるまで、各運動軸C1,C2,C3の軸方向におけるツールセンタポイントVPの位置を調整する。
(もっと読む)
医療用マニピュレータ、及びその初期化方法
【課題】医療用マニピュレータの駆動部側と作業部側の位置関係の初期化を容易にする。
【解決手段】作業部11が新規装着された場合には、各カウンタ45b〜47bをリセットして、原点位置に対応する「0」とする。1回の手術中で作業部11が再装着された場合には、前回の分離時に復帰メモリ49に保存した各カウンタ45b〜47bのカウント値を読み出して、これをそれぞれセットする。新規装着か再装着かは、作業部11に設けられたシリアル表示部29に表示されるシリアル番号から判断する。
(もっと読む)
移動マニピュレータの軌道生成システム
【課題】物品を定められた軌道に従って操作する際の移動台車の軌道及びマニピュレータ機構の軌道を同時に定める移動マニピュレータの軌道生成システムを提供する。
【解決手段】移動マニピュレータの軌道生成システムにおいては、移動台車の位置及び姿勢、並びにマニピュレータ機構の位置及び姿勢に関する初期値が設定される(ステップS01)。物品の軌道に従って把持機構の軌跡が算出される(ステップS02)。この把持機構の軌跡に設定される演算点毎に、移動台車の位置及び姿勢並びにマニピュレータ機構の位置及び姿勢が算出され、複数の解候補が定められる(ステップS03)。各演算点では、移動台車の位置及び姿勢のいずれか一方が制御される。評価関数を使用して移動ロボットの消費エネルギー等を最小にする最適な解が選定される(ステップS04)。
(もっと読む)
組立装置
【課題】移動操作精度を向上させず、凸部の凹部への挿入を短時間で完了でき、ロボットアームの可搬重量や可動範囲が制限されない組立装置を提供する。
【解決手段】凹部を有する部品101を把持して凹部103に凸部を有する部品102の凸部を挿入させるロボットアーム1と、凸部を有する部品102を保持する保持台4と、保持台4に設けられロボットアーム1が凹部103に凸部を有する部品102を挿入させるとき凹部を有する部品101又は凸部を有する部品102が受けるモーメントを検出する力覚センサ2と、保持台4を移動操作するアクチュエータ5aと、保持台4を挿入方向に直交する方向に移動可能に支持する受動機構5bとを備え、凹部103に凸部を有する部品102を挿入させるとき、保持台4に固定された部品が受ける挿入方向の並進力により受動機構5bが変位し、検出されたモーメントに基づきアクチュエータ5aにより保持台4を移動操作する。
(もっと読む)
ロボット、及びオートゼロイング方法
【課題】作業員の手を介することなく自動的に基準姿勢を原点姿勢に調整することができ、また基準姿勢を原点姿勢に精度よく調整することができるロボットを提供する。
【解決手段】搬送ロボット22は、角変位可能に連結された連結部材27,28,29を備え、調整可能な基準姿勢を基準として各連結部材27,28,29の変位を制御する。基台23にはレーザセンサ38を備える。レーザセンサ38は、予め定められた方向にレーザ光を投光し、且つ原点姿勢と一致する第1の検出姿勢に第1の連結部材27が配置されると、投光したレーザ光がリフレクタ41で反射された反射光を受光するようになっている。制御部はレーザ光がリフレクタで反射しレーザセンサ38で受光するように第1の連結部材27を角変位させる。受光した時の第1の連結部材27の姿勢を原点姿勢とする。連結部材28,29についても、リフレクタ42,43を用いて同様に原点を調整する。
(もっと読む)
組立装置
【課題】移動操作精度を向上させることなく、凸部の凹部への挿入を短時間で完了することができ、ロボットアームの可搬重量や可動範囲が制限されることのない組立装置を提供する。
【解決手段】凹部を有する部品101を把持して移動操作し凹部103に凸部が設けられた部品102の凸部を挿入させるロボットアーム1と、凸部が設けられた部品102を保持する保持台と、保持台4に設けられ凹部103に凸部を挿入させようとしたときに凹部を有する部品101または凸部が設けられた部品102が受ける並進力及び/又はこれらの軸周りのモーメントを検出する力覚センサ2と、保持台4を移動操作するアクチュエータ5とを備え、力覚センサ2により検出された並進力及び/又はモーメントに基づき、凸部の先端部の当接位置の凹部103の中心からの方向及び距離を算出し、これらに応じて保持台4を移動操作し、凸部を凹部103に挿入させる。
(もっと読む)
131 - 140 / 392
[ Back to top ]