
国際特許分類[B60R21/00]の内容
処理操作;運輸 (1,245,546) | 車両一般 (234,424) | 他に分類されない車両,車両付属具,または車両部品 (56,583) | 事故又は他の交通危機の場合乗員又は歩行者を負傷から保護又は防止するための車両の装置又は部品 (17,052)
国際特許分類[B60R21/00]の下位に属する分類
交通事故又は差し迫った交通事故の場合における安全装置の始動のための電気回路 (777)
乗員安全装置又は部品 (8,486)
車両の非乗員,例.歩行者の保護[4,2011.01] (935)
国際特許分類[B60R21/00]に分類される特許
2,041 - 2,050 / 6,854
車両の誤発進防止装置
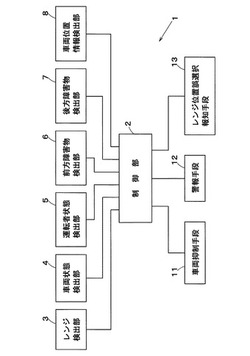
【課題】車両の発進時および車両の発進直後の少なく一方において、運転者が車両を動かそうとする意志の方向と異なる方向に車両が動こうとしたときに、車両の動きを抑制する。
【解決手段】制御部2は、レンジ検出部3からの運転者が選択した選択レンジの検出信号および運転者状態検出部5からの運転者状態検出信号に基づいて、運転者の選択したレンジの車両の移動方向が運転者の車両を移動させようとする意志の方向と異なると判断したときは、車両抑制手段11を作動させて車両の動きを抑制する。
(もっと読む)
物体検出装置、物体検出プログラム、および物体検出方法

【課題】複数のセンサを用いて物体の有無を検出する検出精度を向上すること。
【解決手段】車両検出部120は、カメラ部110によって取得された画像を用いて、検出対象領域の車両の有無を検出する。車両検出部140は、レーダ部130によって受信された反射波の強度分布を用いて、検出対象領域の車両の有無を検出する。車両位置比較部151は、車両検出部120および車両検出部140から通知される車両位置を比較し、それぞれの車両位置の対応関係を確認する。融合判定部152は、車両検出部120から通知された車両位置において車両検出部140が車両を検出していない場合は、レーダ部130から反射波の強度分布を取得する。そして、融合判定部152は、車両検出部120から通知された車両位置における反射波の強度を参照し、反射波の強度が0でなければ車両があると判定する。
(もっと読む)
走行支援制御装置
【課題】 運転者による操作と装置による車線維持のための動作との干渉を防止することが可能な走行支援制御装置を提供する。
【解決手段】 自車両Vが走行する車線を逸脱せずに走行するように走行車線維持支援制御を行うLDW/LKAシステム17を備えた走行支援制御装置10において、LDW/LKAシステム17は、障害物検知センサ11が検出した障害物Oによって狭められた車線の幅である仮想車線幅Wを算出し、算出した仮想車線幅Wが閾値以下と狭く、運転者による回避操作が必要なときに、走行車線維持支援制御を中止する。これにより、適切なタイミングでLDWやLKAの作動を停止させることができ、運転者による操作と装置による車線維持のための動作との干渉を防止することが可能となる。
(もっと読む)
車両の運転支援装置
【課題】撮像手段で撮像された画像中の物標が衝突を回避すべき障害物か否かを精度よく判定する。
【解決手段】自車両前方を撮像し(S1)、撮像した画像中の物標が衝突を回避すべき障害物か否かを判定し(S8)、障害物と自車両との衝突可能性に応じて自車両の作動機器を制御する(S11)車両の運転支援装置において、前記障害物判定をすることができないとき(S4:NO)、前記物標に向けて可視光ビームを照射し(S5)、この可視光ビームの照射状態で撮像した画像中の前記物標が障害物か否かを判定する(S8)。
(もっと読む)
事故情報取得装置
【課題】車両事故が発生したときに、事故車両のみならず周辺車両から多方面の事故状況映像データを簡単に取得する。
【解決手段】事故情報取得装置1は、車両に搭載されており、制御部2と、事故検出部3と、撮影部4と、表示部5と、通信部6と、リムーバブルメモリ7とを備えている。制御部2は、車両事故発生が検出されると、周辺車両に撮影データの提供を要求し、撮影部4が保持する撮影データをリムーバブルメモリ7に格納する。又、周辺車両から撮影データの提供の要求がある場合にも、撮影部4が保持する撮影データをリムーバブルメモリに格納する。
(もっと読む)
運転支援装置
【課題】障害物が検知されたとき、現在ディスプレイに表示されている画像から、検知された位置に対応する撮影手段による画像へ、視点が連続的に移動するように画像を切り替える運転支援装置を提供する。
【解決手段】車両(70)の周囲を異なる視点位置で撮影する複数の撮影手段(10)と、撮影された画像を表示する表示手段(20)と、画像の視点位置が仮想的に一の撮影手段(10L)の視点位置から隣接する他の撮影手段(10B)の視点位置へ連続的な移動をするように、画像を変形させて移行させる切替手段(30)と、車両の周囲の物体を検知する検知手段(40)と、検知手段が車両の周囲に物体(81)を検知し、一の撮影手段(10L)が撮影した画像に物体(81)が含まれないとき、隣接する他の撮影手段(10B)の画像を経由して、物体が撮影された撮影手段(10R)の画像へ、と画像移行を行わせる制御手段(50)と、を備える。
(もっと読む)
運転支援装置
【課題】自車の後方もしくは後側方における道路の複数の車線間の仕切線を直接視認することが困難な場合であっても、車線の位置が確認できる車両周辺の視覚を支援する運転支援装置を提供する。
【解決手段】自車(70)の後方もしくは後側方の画像を撮影する撮影手段(10)と、前記画像に基づき、道路(60)の状態を判定する判定手段(20)と、自車の走行状態(31〜34)を検出する検出手段(30)と、前記自車が複数の車線(81,82)を有する道路(60)を走行するとき、前記走行状態に基づいて前記複数の車線(81,82)を識別するガイド線(GL)を生成する生成手段(40)と、前記ガイド線(GL)が前記画像に重畳して表示される重畳画像(51)を生成する重畳手段(50)と、前記重畳画像(51)を表示する表示手段(60)と、を備える車両の運転支援装置を提供する。
(もっと読む)
車両用警報装置
【課題】車両進行方向にある交差点付近の停止線に関する警報をより適切なタイミングで出力可能な車両用警報装置を提供すること。
【解決手段】車両進行方向にある交差点付近の停止線に関する警報を出力する車両用警報装置10において、停止線から交差点までの距離L1を検出する距離検出手段24と、車両が走行する道路の制限速度VLを検出する制限速度検出手段26と、距離検出手段24及び制限速度検出手段26の検出結果に基づいて、警報の出力タイミングTaを変化させる変化手段28と、警報出力後の走行状況を検出する走行状況検出手段32と、走行状況検出手段32の検出結果に応じて、次回以降の警報の出力タイミングTaを調整する調整手段34と、を備える。
(もっと読む)
駐車支援装置及び駐車支援方法
【課題】駐車のため停止する位置が任意位置であっても、容易に目標駐車位置への駐車を可能とすることを課題とする。
【解決手段】車体の複数位置に設置されたカメラ2で自車両周囲を撮像し、撮像で得られた撮像信号を、カメラ光軸を路面に垂直にした視点からの画像信号に視点変換部11Bで変換合成して俯瞰画像を作成し、作成された俯瞰画像に描画制御部20Bで運転者に駐車を支援する案内指標を設定し、作成された俯瞰画像に設定された案内指標を重畳画像合成部13Bで重畳して重畳画像を作成し、モニタ8に作成された重畳画像を表示することを特徴とする。
(もっと読む)
運転者状態記録装置
【課題】 運転者の危険な運転に対する啓蒙を行なうことが可能な運転者状態記録装置を提供する。
【解決手段】 情報記録装置13は、ドライバ状態検知装置12が生体検査から運転者が危険を感じたことを検出したときに、ドライバ状態検知装置12が撮像した運転者の表情及び車両周囲・車両状態検知装置11が検知した自車両の車内環境を記録するため、運転者が「ひやり」、「はっとした」といった危険を感じた状況における顔の表情、あるいは振動、音声等の自車両の車内環境を記録することができ、運転者自身の危険な運転に対する啓蒙を行なうことが可能となる。
(もっと読む)
2,041 - 2,050 / 6,854
[ Back to top ]