
国際特許分類[B60R21/00]の内容
処理操作;運輸 (1,245,546) | 車両一般 (234,424) | 他に分類されない車両,車両付属具,または車両部品 (56,583) | 事故又は他の交通危機の場合乗員又は歩行者を負傷から保護又は防止するための車両の装置又は部品 (17,052)
国際特許分類[B60R21/00]の下位に属する分類
交通事故又は差し迫った交通事故の場合における安全装置の始動のための電気回路 (777)
乗員安全装置又は部品 (8,486)
車両の非乗員,例.歩行者の保護[4,2011.01] (935)
国際特許分類[B60R21/00]に分類される特許
2,031 - 2,040 / 6,854
車両の衝突防止装置
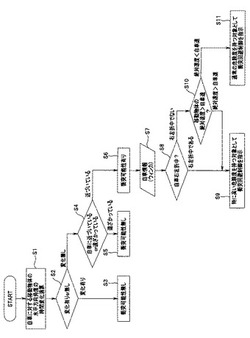
【課題】自車両周囲の移動物体の動きを考慮して衝突の可能性を判断し、安全性を向上させる。
【解決手段】移動物体の自車両に対する水平方向角度の時間変化が無く、移動物体の自車両に対する相対速度から移動物体が自車両に近づいていると判断される場合、衝突の可能性有りと判断し(S6)、自車両が交差点内を右左折中であるか否かを判断する(S8)。そして、右左折中である場合、或いは右左折中でなくとも移動物体の絶対速度が自車速を上回っている場合、特に高いリスクを持つ対象として衝突回避制御の実施を指示し(S9)、右左折中でなく、移動物体の絶対速度が自車速以下である場合には、移動物体を通常のリスク値を持つ対象として衝突回避制御の実施を指示する(S11)。
(もっと読む)
乗員保護装置、作動条件変更方法

【課題】交差点に進入する他車両との関係に配慮してジレンマゾーンの車両が交差点に進入又は停止できる乗員保護装置及び作動条件変更方法を提供すること。
【解決手段】検出された障害物101〜104との衝突を抑制し又は衝突による衝撃から乗員を保護する乗員保護装置100において、ジレンマゾーンに進入するか否かを判定するジレンマゾーン進入判定手段31、32、33、41と、ジレンマゾーンを走行する際、減速するか否かを判定する判定手段42と、減速すると判定された場合、後方の障害物に対応した乗員保護手段23の作動判定基準を緩和する第1の判定基準変更手段44と、減速しないと判定された場合、側方の障害物に対応した乗員保護手段の作動判定基準30を緩和する第2の判定基準変更手段46と、を有すること。
(もっと読む)
車両周辺監視装置
【課題】対象物の種類に鑑みて、車両に搭載されている機器の動作を適当に制御することができる車両周辺監視装置を提供する。
【解決手段】本発明の車両周辺監視装置によれば、車両の前方に第1の接触判定領域が設定され、第1の対象物領域を基準として第2の対象物領域が存在する側に移動推定領域が設定され、第1の接触判定領域に移動推定領域の少なくとも一部が重なるか否かが判定される。四足動物が移動する方向は、胴部に対して頭部が存在している側である可能性が高いことに鑑みて、四足動物が移動する方向に設けられる移動推定領域の少なくとも一部が第1の接触判定領域に重なれば、車両と対象物とが接触する可能性が高い。一方、四足動物が移動する方向に設けられる移動推定領域が第1の接触判定領域に重ならなければ車両と四足動物との接触可能性は低い。したがって、前記のような判定手法により車両と四足動物が接触する可能性を高精度で判定することができる。
(もっと読む)
運転支援装置
【課題】自車の周辺を撮影した画像に車線変更等の運転行動の目安となるガイド線を重畳させて表示する運転支援装置において、ガイド線の輝度を変更し,ガイド線の視認性を向上させることを目的とする。
【解決手段】自車(60)の周辺を撮影する撮影手段(10)と、前記撮影手段(10)が撮影した元画像(12)を表示する表示手段(30)と、前記元画像(12)に表示された前記自車(60)の周辺の道路状況の識別を補完するガイド線(GL)を生成する生成手段(40)と、前記元画像(12)に前記ガイド線(GL)を重畳させて表示手段(30)に表示する重畳手段(20)と、を備え、前記生成手段(40)は、前記ガイド線(GL)の輝度(L)を、前記ガイド線(GL)の周囲の少なくとも一部の画像の輝度(L)と異ならせる運転支援装置を提供する。
(もっと読む)
駐車を支援するための装置
【課題】駐車可能領域が存在するかどうかを判断する。
【解決手段】車両を駐車させるための駐車可能領域の有無を判断するための装置は、該車両の前方を撮像する撮像手段備え、撮像された画像から、駐車している少なくとも第1の車両のナンバープレートおよび第2の車両のナンバープレートを認識する。認識された第1の車両のナンバープレートおよび第2の車両のナンバープレートに基づいて、該第1の車両と該第2の車両の間の距離を算出する。該算出された距離に基づいて、該第1の車両と該第2の車両との間に駐車可能領域が存在するかどうかを判断する。
(もっと読む)
車両制御システム
【課題】ドライバーの心理状況や判断能力によらずに災害時に適切な対応を取ることができる車両制御システムを提供する。
【解決手段】無線回路が、アンテナを制御して外部との無線通信を行い災害情報を受信する。マイコンが、災害情報が受信された後に停車可能なスペースを有する路肩を検出して、検出した路肩に車両が停車するように車両に設けられたアクセルペダル、ブレーキペダル、シフトレバー、ハンドブレーキ、ステアリングをアクチュエータによって操作する自動運転モードを行う。
(もっと読む)
駐車支援装置および駐車支援方法
【課題】切り返しを含む一連の駐車経路を算出して駐車支援を行うことにより、車両運転者の負担をより一層低減できるようにした駐車支援装置および駐車支援方法を提供する。
【解決手段】駐車の初期位置および初期姿勢と、駐車の目標位置および駐車姿勢とを検知し、初期姿勢に応じて初期位置からの車両の経路として設定可能な経路を第1移動経路、駐車姿勢に応じて目標位置に到達する車両の経路として設定可能な経路を第2移動経路としたときに、第1移動経路と第2移動経路との接点となる位置が存在し得る候補領域を算出する。そして、当該候補領域内で車両乗員により選択された位置、あるいは当該候補領域内で任意に自動選択した位置を切り返し位置として決定し、初期位置から切り返し位置を経由して目標位置に到達する一連の経路を駐車経路として算出する。
(もっと読む)
運転者支援装置、運転者支援方法および運転者支援処理プログラム
【課題】死角情報の表示位置を変更すること、および死角情報をドライバに確実に認知させることを課題とする。
【解決手段】運転者支援装置は、ドライバの視線移動を検知すると、移動後のドライバの視線方向に基づいて、当該ドライバにより視認可能な視野範囲を測定する。視野範囲の測定後、運転者支援装置は、測定した視野範囲に収まるように、ヘッドアップディスプレイの画像投影方向を制御して、各車載カメラから入力される死角画像の表示位置を変更する。
(もっと読む)
車両用走行車線検出装置
【課題】 複数車線道路を走行する車両の走行車線の検出精度を向上させること。
【解決手段】 GPS測位データの測位品質を取得する。地図データに基づいて、各車線毎に、車線中央の少なくとも2つのノードの位置と、少なくとも2つのノードを連結したリンクを表す車線中央リンクデータを生成する。取得した測位品質に応じて選択した測位手段によって測定された自車位置を、当該自車位置に最も近い車線中央線リンクにマッチングさせるとともに、当該マッチングに係る車線の幅を所定値拡大させ、自車位置が該拡大した幅の車線内にあるときは、当該マッチングに係る車線へのマッチングを維持する。
(もっと読む)
車両制御システム
【課題】ドライバーに対して災害時での適切な対応を促すことができる車両制御システムを提供する。
【解決手段】車両制御システムは、災害情報を受信すると、30秒後に速度制限が行われることをドライバーに通知する。その後、車両制御システムは、ハザードランプを点滅させる制御を行って、30秒経過した後に車両が停止されていなければ災害解除情報を受信するまで速度を制限する制御を行う。災害解除情報を受信すると車両制御システム1は、速度の制限を解除する。
(もっと読む)
2,031 - 2,040 / 6,854
[ Back to top ]