
国際特許分類[B60T8/17]の内容
処理操作;運輸 (1,245,546) | 車両一般 (234,424) | 車両用制動制御方式またはそれらの部品;制動制御方式またはそれらの部品一般;車両への制動要素の構成一般;車両が不意に動くのを阻止するためのもち運びできる装置;制動装置の冷却を助長するための車両の改造 (12,974) | 車両の状態または路面状況の変化に適合するための車輪制動力の調整装置,例.制動力の配分を制限または変更するための装置 (5,901) | ブレーキを制御するために電気調整手段または電子調整手段を用いるもの (3,677)
国際特許分類[B60T8/17]の下位に属する分類
この調整で使用されるパラメータを検知するもの;この調整で使用される値を測定するもの (161)
この調整で使用される制御パラメータを決定するもの,例.測定または検知されたパラメータに関する計算によるもの (401)
望ましくない信号による影響,例.振動または電子ノイズによるもの,を除去または減少させるもの (27)
特殊な制御理論の使用に特徴を有するもの,例.ファジー理論 (37)
車両の加速時の過度な車輪回転の防止に特に適したブレーキ調整,例.トラクション制御のためのもの (131)
車両の安定の制御に特に適したブレーキ調整,例.カーブでのヨーレートまたは横加速度を考慮したもの (913)
車両の減速時の,過度の車輪のスリップの防止に特に適したブレーキ調整,例.ABS (492)
国際特許分類[B60T8/17]に分類される特許
1,091 - 1,100 / 1,515
液圧制御装置
【課題】制御弁の耐久性向上と制御液圧の応答性とを両立させる。
【解決手段】ブレーキ制御装置20は、ホイールシリンダ23における制御液圧を制御するための増圧リニア制御弁66と、ホイールシリンダ23における制御液圧を制御するための減圧リニア制御弁67と、開度を漸減させて増圧リニア制御弁66を閉弁するとともに、増圧リニア制御弁66の閉弁動作の開始から完了までに生じ得る制御液圧の目標液圧からの乖離を軽減するよう減圧リニア制御弁67を開閉するブレーキECU70と、を備える。
(もっと読む)
車線逸脱防止装置

【課題】制動力制御を行う車線逸脱防止装置と制動力制御を行う他の走行制御装置とを併用する場合でも、両装置の制御の両立を図ることができるようにする。
【解決手段】車線逸脱防止装置は、走行車線に対した自車両が逸脱傾向にあると判定した場合(ステップS4、ステップS5)、走行制御として、自車両の制動力を制御して走行車線に対する自車両の逸脱を回避する車線逸脱防止制御を行う(ステップS6〜ステップS8)。ここで、制動力制御を行うCOPが作動可能性あり(作動可能性が高い)と判定した場合、逸脱傾向判定用しきい値XLを補正し、逸脱傾向ありと判定し易くなるように車線逸脱判定を補正する(ステップS3)。
(もっと読む)
車両用ブレーキ制御装置
【課題】リニア弁を用いて各W/C圧の調圧を行う車両用ブレーキ制御装置において、ドライバのブレーキフィーリングの向上を図る。
【解決手段】ブレーキペダルの操作量に対する目標W/C圧の特性が行きマップと戻りマップというヒステリシスを設けるような形態となるようにする。そして、ブレーキペダルの操作状態に応じて行きマップと戻りマップを選択し、第1〜第4リニア弁に流す電流の電流値を決定する。これにより、ブレーキペダルを少し操作しただけでW/C圧がそれに追従して変化するということを防止でき、ドライバが意図的にブレーキペダルを操作していないときにまでW/C圧が変化してしまうことを防止できる。したがって、ドライバのブレーキフィーリングを向上させることが可能となる。
(もっと読む)
車両におけるブレーキ装置
【課題】 スポーツ走行時および通常走行時の両方に適した制動特性を得ることが可能なブレーキ装置を提供する。
【解決手段】 ダンパーの減衰力を高めに設定して車両の旋回性能を高めたいスポーツ走行時に、ブレーキペダルの踏力の増加に対して制動力を急激に立ち上げる量であるジャンピング量を大きく設定し、スポーツ走行に適した制動力の立ち上げを確保しても、ダンパーの減衰力が高めに設定されているので制動初期の車体のノーズダイブを抑えることができる。また車両の乗り心地を高めたい通常走行時にダンパーの減衰力が低めに設定されていても、前記ジャンピング量が小さく設定されるので制動初期の車体のノーズダイブを抑えることができる。
(もっと読む)
BBW式ブレーキ装置
【課題】 BBW式ブレーキ装置の部品を交換した場合でも、ブレーキ装置のアクチュエータを的確に制御して前記部品の性能や特性の変化を補償できるようにする。
【解決手段】 BBW式ブレーキ装置を構成する部品(例えば、ディスクブレーキ装置のブレーキパッド41)に、そのブレーキパッド41に付随する性能や特性等の情報を記憶するICタグ42を設けたので、その情報をタグリーダ43で読み取って電子制御ユニットUに入力することで、電子制御ユニットUは前記情報に基づいてBBW式ブレーキ装置の制動力発生手段の制御を変更することで、交換によって前記部品の性能や特性が変化しても、それに応じて前記制動力発生手段の制御を的確に行うことで制動特性の変化を防止することができる。
(もっと読む)
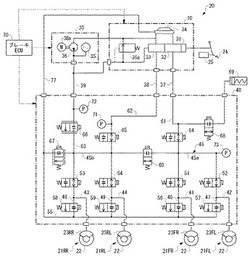
ブレーキ制御装置
【課題】高い信頼性を実現することができるブレーキ制御装置を提供する。
【解決手段】液圧ブレーキユニット20は、作動液の供給により車輪に液圧制動力を付与するホイールシリンダ23と、運転者によるブレーキ操作部材の操作量に応じて作動液を加圧するマスタシリンダユニット27と、マスタシリンダユニット27からホイールシリンダ23への作動液の供給経路上に設けられたレギュレータカット弁65と、供給経路に並列に設けられ、運転者によるブレーキ操作部材への操作から独立してホイールシリンダ圧を制御し得るホイールシリンダ圧制御系統と、ホイールシリンダ圧制御系統によりホイールシリンダ圧を制御するに際してレギュレータカット弁65を閉弁し、当該弁の上下流間の差圧が所定の液圧を超えると機械的に開弁されるよう当該弁の開弁圧を制御するブレーキECU70と、を備える。
(もっと読む)
車線逸脱防止装置
【課題】自車両が停止を要する走行シーンを考慮して車線逸脱防止制御を行う。
【解決手段】車線逸脱防止装置は、走行車線に対した自車両が逸脱傾向にあると判定した場合(ステップS3、ステップS4)、自車両の制動力を制御して走行車線に対する自車両の逸脱を防止する車線逸脱防止制御を行う(ステップS7〜ステップS11)。ここで、自車両の停止の必要性が高いエリアまでの距離情報を検出し(ステップS6)、その検出した距離情報に基づいて、車線逸脱防止制御の制御内容を変更する(ステップS11)。
(もっと読む)
ブレーキ装置
【課題】 BBW式ブレーキ装置のストロークシミュレータの反力発生特性を、簡単な構造で任意に制御できるようにする。
【解決手段】 BBW式ブレーキ装置において、マスタシリンダ10とホイールシリンダ19F,19Rとの連通が遮断されているときにブレーキペダル11のストロークをストロークシミュレータ25により許容する際に、少なくともマスタシリンダ10およびストロークシミュレータ25間の液路17mを流通する液体を磁気粘性流体で構成するとともに、前記液路17mに設けた絞り33の周囲にコイル34を設けたので、コイル34を励磁して発生する磁界の強さを変化させることで、液路17mを流れる磁気粘性流体の見かけの粘性を変化させて流通抵抗を制御することが可能となり、構造が複雑な流量制御バルブを設けることなくストロークシミュレータ25の反力発生特性を任意に制御することができる。
(もっと読む)
車両の走行制御装置
【課題】車線逸脱防止制御と追従走行制御等の車速制御とが作動すべきシーンにおいて、両制御の協調を図るものであり、車速制御による減速制御を行いしつつも、確実な車線逸脱防止を実現する。
【解決手段】車両の走行制御装置は、車線逸脱すると判定される前に、推定横変位(絶対値)Xsが第2逸脱傾向判定用しきい値XK以上となり、第2逸脱判断フラグFKoutをONに設定した場合(ステップS31)、追従走行制御で用いる目標車間距離L*を増加補正する(ステップS32)。これにより、その増加補正した目標車間距離L*に基づいて当該追従走行制御で車間距離制御がなされる。この結果、車線逸脱防止制御が作動する直前の追従走行制御では、通常の制御時の値よりも大きい減速度により減速制御するようになる。
(もっと読む)
制動力制御システム
【課題】車両の制動性能及び制動信頼性をより高めた制動力制御システムを実現する。
【解決手段】制動力制御システムは、車輪速センサ14a,14bの検出値に基づきフロント制動装置12a,12bを駆動制御するフロント演算装置16と、車輪速センサ14c,14dの検出値に基づきリア制動装置12c,12dを駆動制御するリア演算装置18とを備え、フロント演算装置16とリア演算装置18は、通信ライン20を介して相互に接続されるものとし、フロント演算装置16は、リア演算装置18の制御対象車輪に対応する車輪速センサ14c,14dの検出値に基づいた車輪速情報又は車体速度情報を通信ライン20から取得し、その取得情報に基づき自己の制御対象車輪のフロント制動装置12a,12bを駆動制御する。
(もっと読む)
1,091 - 1,100 / 1,515
[ Back to top ]