
国際特許分類[B60T8/17]の内容
処理操作;運輸 (1,245,546) | 車両一般 (234,424) | 車両用制動制御方式またはそれらの部品;制動制御方式またはそれらの部品一般;車両への制動要素の構成一般;車両が不意に動くのを阻止するためのもち運びできる装置;制動装置の冷却を助長するための車両の改造 (12,974) | 車両の状態または路面状況の変化に適合するための車輪制動力の調整装置,例.制動力の配分を制限または変更するための装置 (5,901) | ブレーキを制御するために電気調整手段または電子調整手段を用いるもの (3,677)
国際特許分類[B60T8/17]の下位に属する分類
この調整で使用されるパラメータを検知するもの;この調整で使用される値を測定するもの (161)
この調整で使用される制御パラメータを決定するもの,例.測定または検知されたパラメータに関する計算によるもの (401)
望ましくない信号による影響,例.振動または電子ノイズによるもの,を除去または減少させるもの (27)
特殊な制御理論の使用に特徴を有するもの,例.ファジー理論 (37)
車両の加速時の過度な車輪回転の防止に特に適したブレーキ調整,例.トラクション制御のためのもの (131)
車両の安定の制御に特に適したブレーキ調整,例.カーブでのヨーレートまたは横加速度を考慮したもの (913)
車両の減速時の,過度の車輪のスリップの防止に特に適したブレーキ調整,例.ABS (492)
国際特許分類[B60T8/17]に分類される特許
1,061 - 1,070 / 1,515
車両用ブレーキ液圧制御装置
【課題】部材同士の納まりがよく、小型化を図る。
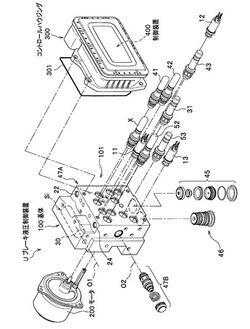
【解決手段】ダミーシリンダ30を含むストロークシミュレータSiとを備えた車両用ブレーキ液圧制御装置であって、ブレーキ系統に対応する流路が構成された基体100と、基体100の一方の面に取り付けられ、流路におけるブレーキ液の流れを制御する複数の電磁弁31,X,41〜43,52,53と、基体100の一方の面の背面側となる他方の面に取り付けられたモータ200と、基体100の一方の面に隣接する側面に取り付けられてモータ200により駆動され、流路にブレーキ液を吐出するポンプ47A,47Bと、を備え、ダミーシリンダ30およびポンプ47A,47Bは、互いに長手方向の軸線O1,O2を略平行にして基体100に並設されている構成とした。
(もっと読む)
車両用ブレーキ液圧制御装置

【課題】ポンプの脈動がブレーキ操作子に伝わることがなく、操作フィーリングに優れた車両用ブレーキ液圧制御装置を提供する。
【解決手段】第1のブレーキ操作子L1に接続され、第1マスタシリンダMC1とブレーキ液を大気圧下で貯留するアキュームレータ7,8とを備え、第2ブレーキ系統K2の車輪ブレーキFを連動制御することが可能な第1ブレーキ系統K1を備え、第1ブレーキ系統K1の第1出力液圧路D1へ流入するブレーキ液の流入経路を、ポンプ24の作動時に第1マスタシリンダMC1側からアキュームレータ7,8側に切り替える切替手段6を設ける。
(もっと読む)
車両用ブレーキ液圧制御装置
【課題】ポンプの脈動がブレーキ操作子に伝わらず、また、制動の応答性を向上させる。
【解決手段】ポンプ47Aの作動により上昇されたブレーキ液圧により車輪ブレーキB1の制動動作が可能で、マスタシリンダC1側から車輪ブレーキB1側に通じる出力液圧路をポンプ47Aの作動時に遮断する遮断弁X、および遮断弁Xの下流で、かつポンプ47Aの上流に液溜め部45,46を設け、ブレーキ操作子L1の操作により遮断弁XよりもマスタシリンダC1側に発生するブレーキ液圧を受けてストロークし、少なくとも車輪ブレーキB1に通じる液圧路に圧力を付与する加圧部材48を設ける。
(もっと読む)
車両用ブレーキ制御装置
【課題】跨ぎ路において、高μ路上の車輪のW/C圧の増圧に伴ってポンプからブレーキ液が吐出されても、低μ路上の車輪のW/C圧の減圧を良好に行うことができるようにする。
【解決手段】ABS制御時に、高μ路で要求される増圧スピードに対応するために必要なモータ回転数と、低μ路における最低解除油圧を考慮した場合に出力できるモータ回転数を求める。そして、このように求めたモータ回転数を発生させるように、第1、第2モータ11、12に流す電流の電流値を設定する。これにより、跨ぎ路においてABS制御を実行するに際し、高μ路上の車輪のW/C圧の増圧に伴ってポンプからブレーキ液が吐出されても、低μ路上の車輪のW/C圧の減圧を良好に行うことが可能となる。
(もっと読む)
制動力制御装置
【課題】バッテリの大容量化を図らずとも車輌性能(制動性能や挙動性能)を確保すること。
【解決手段】車輪10FL,10FR,10RL,10RRへの要求全制動トルクに基づいて機械制動トルク制御手段24への要求機械制動トルク及びモータ制御手段32への要求モータトルクの設定を行う要求機械制動トルク・要求モータトルク設定手段41jと、車輌全体の各モータで回生及び力行可能なモータトルクをバッテリ33の入出力可能電力に応じて算出する回生/力行可能モータトルク算出手段41kと、その車輌全体の回生/力行可能モータトルクよりも車輌全体の各モータに対する夫々の要求モータトルクの合算値の方が大きいときに、車輌における所定の性能への影響が大きい車輪のモータのモータトルク可変幅を他の車輪のモータに対して相対的に大きくするモータトルク可変幅設定手段41lと、を設けること。
(もっと読む)
車両走行制御装置および車両走行制御方法
【課題】車両の走行状態に応じて、加減速を滑らかに行い、設定された目標減速度に対する追従性を向上することができる車両走行制御装置および車両走行制御方法を提供すること。
【解決手段】要求制駆動力F(要求)を取得し(ステップST401)、実加速度RGを取得し(ステップST402)、車速およびシフトポジションを取得し(ステップST403)、この取得した車速およびシフトポジションに基づいて、自車両に搭載されているエンジンのスロットルバルブを全閉にした状態における全閉時推定制駆動力F(下限)を取得し(ステップST404)、自車両の質量mを取得し(ステップST405)、要求制駆動力F(要求)と、実加速度RGと、全閉時推定制駆動力F(下限)とに基づいて、全閉時推定制駆動力F(下限)を自車両に発生させた際の全閉時予測実加速度FGを算出する(ステップST406)。
(もっと読む)
ブレーキ制御装置
【課題】フィードバック制御則を用いたブレーキ制御において、良好なブレーキフィーリングを実現する。
【解決手段】目標減速度の補正に際し、ブレーキペダルの踏み込み速度の絶対値が大きくなるほど、比例ゲインPgainが小さくなるようにし、さらに積分補正係数HoseiIを小さくして積分ゲインの影響が小さくなるようにしている。これにより、車両の減速度が目標減速度に到達するまでの間において、ずれたフィードバックゲインの過渡的な影響を低減することができ、その間の減速度の変動を抑制することができる。また、ブレーキペダルの踏み込み速度が緩和されたときの積分ゲインの影響が小さくなり、ブレーキフィーリングを安定に保つことができる。
(もっと読む)
車両用電子制御装置および車両ブレーキ用電子制御装置
【課題】車両用電子制御装置において、負荷の駆動に必要な電圧に対して適切な駆動電圧を負荷に印加することにより、負荷および/または負荷用のスイッチング手段の発熱をできるだけ抑制しかつ印加時間をできるだけ延ばす。
【解決手段】車両用電子制御装置は、電源BATに直列に接続された負荷と、負荷の状態を検出する負荷状態検出手段と、負荷状態検出手段によって検出された負荷の状態に基づいて、負荷に供給される駆動電圧であって必要最低限の電圧である必要最低駆動電圧を算出する必要最低駆動電圧算出手段と、電源から供給される電源電圧を、必要最低駆動電圧算出手段によって算出された必要最低駆動電圧に変更し、その電圧を駆動電圧として負荷に供給する電源供給リレー手段(63)と、を備えている。
(もっと読む)
車両用支援制御装置
【課題】運転者の障害物回避行動の意図を反映させつつ、緊急回避が必要と判断されたときに、その運転者の障害物回避行動による制御から緊急回避制御への切り替えを迅速に行うことのできる車両用支援制御装置を提供する。
【解決手段】本発明の車両用支援制御装置は、障害物の回避操作時に運転者の操舵量に応じて車両の操舵系を駆動する通常時車両操舵手段10Dと、障害物の位置と自車両の走行状態とに基づいて通常時車両操舵手段10Dによる回避制御によっては障害物の回避を不能と判断したときに緊急事態として運転者の障害物回避行動を反映させつつ障害物回避制御を行う緊急時障害物回避手段6とを備えている。
(もっと読む)
車両制御装置及び方法
【課題】運転のし易い車両特性が得られるようにした車両制御装置を提供する。
【解決手段】運転者の前方注視点位置を推定あるいは検出し(100)、推定あるいは検出された前方注視点位置に基づいて、前方注視点位置までの距離が長くなるにしたがって、運転者のハンドル操作量に対するヨーレートの応答を表わす伝達関数に含まれる時定数が長くなるように車両特性を設定し(102)、設定された車両特性が得られるように車両を制御する(104、106)。
(もっと読む)
1,061 - 1,070 / 1,515
[ Back to top ]