
国際特許分類[B60W10/04]の内容
処理操作;運輸 (1,245,546) | 車両一般 (234,424) | 異なる種類または異なる機能の車両用サブユニットの関連制御;ハイブリッド車両に特に適した制御システム;特定の単一のサブユニットの制御に関するものではない、特定の目的のための道路走行用車両の運動制御システム (34,847) | 異なる種類または異なる機能の車両用サブユニットの関連制御 (21,615) | 推進装置の制御を含むもの (11,419)
国際特許分類[B60W10/04]の下位に属する分類
燃焼機関の制御を含むもの (4,007)
電気推進装置の制御を含むもの,例.電動機,発電機 (5,223)
国際特許分類[B60W10/04]に分類される特許
81 - 90 / 2,189
車両制御装置、および車両制御プログラム
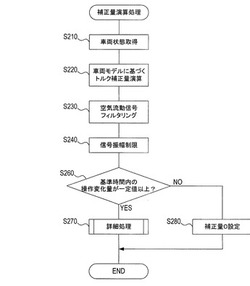
【課題】車両の制御量を演算する車両制御装置、および車両制御プログラムにおいて、車両における振動を適切に抑制することできるようにする。
【解決手段】車両制御システムを構成する各ECUは、車両における車室内の空気変動の情報を取得し(S210)、車室内の空気変動を変化させるための車両に対する制御量である空気変動補正制御量を演算し(S270)、空気変動補正制御量を出力する。このような車両制御システム1によれば、実際の空気変動に基づいた制御量を演算し出力するので、車室内の空気変動を変化させることができる。ここで、空気変動は、車両の振動に対応して生じるものと考えられるため、空気変動を変化させる(主に抑制する)ことによって車両の振動を抑制することができる。
(もっと読む)
車両制御装置

【課題】全加減速シーンにおける加速性能を低下させることなく、エネルギー効率の向上を図る。
【解決手段】目標加減速度Adと、境界加減速度Anのうち目標加減速度Adに最も近い境界加減速度Amとの差分が加速度規定範囲ΔAd内か否かを判定し、目標加減速度Adと境界加減速度Anに基づいて新たにエンジンの駆動が必要と判定した場合でも、目標加減速度Adと、境界加減速度Anのうち目標加減速度Adに最も近い境界加減速度Amとの差分が加速度規定範囲ΔAd内であると判定された場合、目標加減速度Adを駆動中のモータにより実現可能な加速度に変更する。
(もっと読む)
車両用モータ駆動装置の変速制御方法および自動車の変速制御方法
【課題】2ウェイローラクラッチを用いた車両用モータ駆動装置の変速に要する時間を抑えるとともに、変速ショックを低減する。
【解決手段】変速指令を出す第1ステップS1と、1速シフト位置から2速シフト位置にシフトリングを移動させる第2ステップS2と、1速の2ウェイローラクラッチの係合を解除するよう電動モータの出力を制御する第3ステップS3と、回転数制御によりシンクロ動作を行なう第4ステップS4と、電動モータの出力制御を、回転数制御からトルク制御に切り替え、そのトルク制御で電動モータの出力トルクを徐々に立ち上げる第5ステップS5とを有する。
(もっと読む)
制駆動力制御装置および制駆動力制御方法
【課題】制振のための制駆動力制御を行う際に、制御介入時の動作をより適切なものとすること。
【解決手段】車両における制駆動状態に基づいて、車両に働く荷重を安定化させるための荷重安定化制駆動力指令値を算出する荷重安定化制駆動力指令値算出手段と、車両における操舵状態に基づいて、車両の荷重を付加するための荷重付加制駆動力指令値を算出する荷重付加制駆動力指令値算出手段と、車両の走行状況に基づいて、走行環境の安定度合いを示す荷重安定化指標を算出する荷重安定化指標算出手段と、操舵入力に基づいて、操舵操作の安定度合いを示す荷重付加指標を算出する荷重付加指標算出手段と、荷重安定化制駆動力指令値と、荷重付加制駆動力指令値と、荷重安定化指標と、荷重付加指標とに基づいて、制駆動力制御手段による制駆動力の付与状態を制御するトルク制御手段とを有する制駆動力制御装置とした。
(もっと読む)
車両の制御装置
【課題】車両の制御装置において、変速時における機関回転数の低下を防止して内燃機関の停止を抑制可能とする。
【解決手段】エンジン11と多段変速機13との間にクラッチ12を設け、多段変速機13の出力軸28にモータジェネレータ14を接続し、このモータジェネレータ14にバッテリ26を接続して構成し、バッテリ26の充電状態量が予め設定された所定値より少ないときに多段変速機13における変速線を高回転数に補正し、多段変速機13による変速時にエンジン11の回転数が自立回転数より低下しないようにモータジェネレータ14によりアシスト可能とし、このモータジェネレータ14が駆動するときに補正された変速線を用いて変速制御を実行する。
(もっと読む)
周辺監視装置および周辺監視方法、並びに運転支援装置
【課題】 物体を検出する際の計算量の低減を図り、もって物体の推定誤差の増大や計算不能となる事態を防止することができる周辺監視装置および周辺監視方法、さらには物体の存在に基づく運転支援を行うことができる運転支援装置を提供する。
【解決手段】 車両運転ECU1は、車両の周囲における障害物を検出して認識し、認識した障害物に基づいて、回避ルートの策定などの運転支援を行う。障害物の検出にあたり、認識信頼度が最高値である最高値グリッドと車両グリッドとの間に認識信頼度が中間値よりも大きいグリッドがある場合、虚の障害物を示すグリッドであるとして、当該グリッドの認識信頼度を最小値に修正する。
(もっと読む)
ハイブリッド車両の制御装置
【課題】クラッチの入力回転数と出力回転数とを素早く同期させる。
【解決手段】無段変速機の入力側にはエンジンが連結され、無段変速機の出力側にはクラッチを介して電動モータが連結される。また、電動モータには駆動輪が連結される。EVモードからHEVモードに切り換えるため、クラッチを締結状態に切り換える際には、エンジンの回転数制御および無段変速機の変速制御が実行され、車速に連動する出力回転数に向けて入力回転数が引き上げられる。この同期制御においては、エンジンは固定された目標回転数TNe2に向けて最大出力トルクで制御される。また、無段変速機は、入力回転数Nciと出力回転数Ncoとの回転数差を解消するように最大変速速度でアップシフトされる。これにより、入力回転数Nciを素早く引き上げることができ、入力回転数Nciと出力回転数Ncoとを素早く同期させることが可能となる。
(もっと読む)
ハイブリッド車両の制御装置
【課題】第1電動機、第2電動機、及び自動変速機を備えたハイブリッド車両におけるコーストダウン変速を好適化するハイブリッド車両の制御装置を提供する。
【解決手段】コーストダウン変速に際して、第1電動機MG1により反力トルクを発生させることでその変速を進行させるものであることから、変速時間を増加させることなく電力収支を成立させることができる。すなわち、第1電動機MG1、第2電動機MG2、及び自動変速部20を備えたハイブリッド車両におけるコーストダウン変速を好適化するハイブリッド車両の制御装置を提供することができる。
(もっと読む)
車両用動力伝達装置の制御装置
【課題】電気式変速機構と機械式変速機構とを備える車両用動力伝達装置において、機械式変速機構の変速に際して、充放電収支に関係なく、目標エンジン回転速度を維持する。
【解決手段】自動変速機18の変速に伴うMG2回転速度Nmの変化によってエンジン軸に付加されるトルク分に相当するエンジントルクTeを変化させるエンジントルク補正制御が、自動変速機18の変速におけるイナーシャ相中に実行されるので、MG2回転速度Nmの変化によるエンジン軸発生トルクをエンジン12側で相殺することにより、充放電収支を変えることなく、自動変速機18の変速に伴う実エンジン回転速度Neと目標エンジン回転速度Ne*との乖離を抑制する制御を実施することができる。
(もっと読む)
車両の駆動制御装置
【課題】遠心式の発進クラッチを備えた構成でクリープ機能を持たせることができる車両の駆動制御装置を提供する。
【解決手段】エンジン34を制御する制御ユニット26が、電子スロットル部23により吸気絞り弁21の開度を制御して、発進クラッチ40の引きずりトルクを発生させるエンジン回転数であるクリープ力発生回転数に保持するクリープ制御を行うようにした。
(もっと読む)
81 - 90 / 2,189
[ Back to top ]