
国際特許分類[B60W10/04]の内容
処理操作;運輸 (1,245,546) | 車両一般 (234,424) | 異なる種類または異なる機能の車両用サブユニットの関連制御;ハイブリッド車両に特に適した制御システム;特定の単一のサブユニットの制御に関するものではない、特定の目的のための道路走行用車両の運動制御システム (34,847) | 異なる種類または異なる機能の車両用サブユニットの関連制御 (21,615) | 推進装置の制御を含むもの (11,419)
国際特許分類[B60W10/04]の下位に属する分類
燃焼機関の制御を含むもの (4,007)
電気推進装置の制御を含むもの,例.電動機,発電機 (5,223)
国際特許分類[B60W10/04]に分類される特許
61 - 70 / 2,189
省燃費運転システム
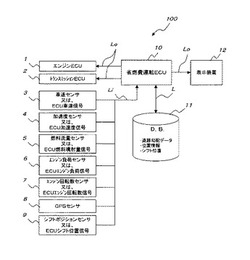
【課題】 本発明の目的は、上り坂を走行中に上り坂に関する道路勾配情報データベースを構築することが出来て、上り坂を走行する際に省燃費走行を行なう様なアドバイスや車両制御を行なうことが出来る省燃費運転システムを提供するにある。
【解決手段】GPSセンサ(8)によって自車の位置情報を取得し(S3)、エンジン出力が規定値(Pa)以上であるか否かを判断し(S4)、エンジン出力が規定値(Pa)以上であれば加速度が規定値(αa)以上であるか否かを判断し(S5)、エンジン出力が規定値以上ではなく、また加速度が規定値(αa)以下ではないときはシフトダウンに必要な時間(Ta)以内であるか否かを判断し(S6)、シフトダウンに必要な時間(Ta)以内にシフトダウンを行なっているか否かを判断し(S7)、前記加速度が規定値(αa)以上であるか、又は前記シフトダウンを待っていれば上り坂と判定し(S8)、位置情報、勾配情報、シフト位置を記憶装置(11)に記憶させる(S9)。
(もっと読む)
車両制御装置、車両制御プログラム、および車両制御方法

【課題】車両の運動状態を制御する車両制御装置において、より車両の安定性を向上させることができるようにする。
【解決手段】車両制御システムにおいては、外部力推定部40としての機能を利用して、当該車両の走行に伴って外部から受ける力を表す路面反力、路面の摩擦抵抗、車輪荷重、上下方向反力等の外部力を推定し、タイヤモデル制御部51、サスアームモデル制御部52、スプリング&ダンパモデル制御部53としての機能を利用して、駆動トルク、操舵力、ブレーキ油圧、および外部力に基づいて、制御対象部の運動状態を示す速度や加速度等のパラメータを推定する。そして、各モデル制御部51〜53としての機能を利用して、パラメータが予め設定された目標範囲内になるように、駆動トルク、操舵力、ブレーキ油圧等を補正する。
(もっと読む)
旋回走行制御装置、旋回走行制御方法
【課題】車高に比べてトレッド幅の狭い車両の旋回性能を改善する。
【解決手段】前後輪のロール剛性に対して制限値Kφminを設定する。そして、電動スタビライザ4F及び4Rを駆動制御し、前後輪のロール剛性を個別に調整することで、前後輪のロール剛性を制限値Kφminよりも大きくする。また、前輪における旋回内輪の輪荷重が0になる前後輪ロール剛性配分Pを上限値Pmax=a1Q+b1で定義し、前輪における旋回内輪の輪荷重が0になる前後輪ロール剛性配分Pを下限値Pmin=a2Q+b2で定義する。そして、前後輪ロール剛性配分Pが上限値Pmaxより小さく、且つ下限値Pminより大きくなるように、電動スタビライザ4F及び4Rを駆動制御して、前後輪のロール剛性を個別に調整する。
(もっと読む)
車両
【課題】生産コストの上昇を抑制しつつ、手動変速機の変速時のショックを抑制する。
【解決手段】ECUは、車両の暖機が完了した状態であって(S100にてYES)、手動変速機が変速中の状態であって(S102にてYES)、かつ、ブレーキペダルが踏み込まれた状態であって、車両が減速状態であるという走行状態である場合に(S104にてYES)、ダウンシフトに対応した第1エンジン制御を実行するステップ(S106)と、車両の暖機が完了していない状態であったり(S100にてNO)、手動変速機が変速中の状態でなかったり(S102にてNO)、あるいは、上述の走行状態でなかったりした場合に(S104にてNO)、アクセルペダルの踏み込み量に応じた出力を発生させるための第2エンジン制御を実行するステップ(S108)とを含む、プログラムを実行する。
(もっと読む)
車両用駆動制御装置および車両用駆動装置の制御方法
【課題】クラッチ機構の接続時において、車両に発生する不快なショックを低減することが可能な車両用駆動制御装置および車両用駆動装置の制御方法の提供。
【解決手段】エンジン2と駆動輪18R、18Lとの間には、電動モータ6が直列に配置されている。エンジン2と電動モータ6との間にはクラッチ装置5が設けられ、駆動輪18R、18Lはエンジン2または電動モータ6によって駆動される。クラッチ装置5を切断状態から接続状態へと作動させる際に、車両VEが加速指向にあることが検出された場合には、エンジン2の回転速度Neを電動モータ6の回転速度Nmより大きい加速指向目標値NHにした後にクラッチ装置5を係合させ、車両VEが減速指向にあることが検出された場合には、エンジン2の回転速度Neを電動モータ6の回転速度Nmより小さい減速指向目標値NLにした後にクラッチ装置5を係合させる。
(もっと読む)
ハイブリッド車両の制御装置
【課題】クラッチ解放時におけるショックの発生を抑制するハイブリッド車両の制御装置を提供する。
【解決手段】クラッチの解放制御に際して、そのクラッチのトルク容量及びエンジンの出力トルクのうち何れか小さい方と、電動機の出力トルクとによって要求トルクを実現するものであることから、エンジントルクがクラッチトルク容量を下回る場合においても、そのエンジントルク相当の伝達トルクを前記電動機の出力トルクで補償することにより、クラッチの解放に際してのショックを好適に抑制することができる。
(もっと読む)
電動パワーステアリング装置および車両用制御装置
【課題】急発進する必要がある場合により早く発進できる状態とすることができる技術を提供する。
【解決手段】操舵トルクを検出するトルクセンサと、電動モータ110と、ステアリングホイールの操作角度を検出する操舵角センサと、車両に設けられ予め定められた停止条件が成立した場合にエンジンを自動的に停止させるとともにエンジンが停止している状態で予め定められた始動条件が成立した場合にエンジンを自動的に再始動させるエンジン制御装置6に対して、予め定められた停止条件が成立した場合であってもエンジンの停止を禁止する旨を要求し、および/または予め定められた始動条件が成立していなくてもエンジンの再始動を要求するモータ制御部40と、を備え、モータ制御部40は、操舵トルクが基準トルクを超えている場合、あるいは操作角度が基準角度を超えている場合には、エンジンの停止を禁止する旨を要求、またはエンジンの再始動を要求する。
(もっと読む)
車両の停止制御装置
【課題】自動的に停止・再始動される内燃機関と、内燃機関の停止中に車両を自動的に制動する制動装置を有する場合において、それらを適切に制御することにより、車両の円滑な発進と燃費の向上を実現できる車両の停止制御装置を提供する。
【解決手段】車両Vは、アイドルストップが行われるエンジン3と、アイドルストップ中に作動し、車両Vを制動するパーキングブレーキ60を有している。停止制御装置1によれば、アイドルストップ中に検出された路面の勾配に応じて、再始動時目標回転数NECMDRSTおよびブレーキ解除時間TBRKOFFを設定し、エンジン3が再始動される際に、エンジン回転数NEが再始動時目標回転数NECMDRSTになるようにエンジン3の出力を制御するとともに、再始動時制御の開始時から解除終了時間TBRKOFFが経過したときに、パーキングブレーキ60による制動を解除する。
(もっと読む)
ハイブリッド車の制御装置
【課題】エンジンとMG(モータジェネレータ)との間にクラッチを設けたハイブリッド車において、MGの要求トルクの低減と燃費向上を実現しながら、減速からの再加速時に車両をスムーズに加速させることができるようにする。
【解決手段】車両の走行中にブレーキが作動状態になったときに始動クラッチ18を解放すると共にエンジン11の燃焼を停止させる減速要求時制御を実行し、この減速要求時制御の実行中にブレーキの作動が解除されたときに始動クラッチ18を締結させてエンジン回転速度を引き上げるエンジン回転引上制御を実行して、車輪17の動力とMG12の動力の両方でエンジン回転速度を引き上げる。そして、エンジン回転引上制御が完了し且つ再加速要求が発生した状態になったときにエンジン11を再始動させて、再加速要求が発生した直後からエンジン11の動力とMG12の動力の両方で車両を加速させる。
(もっと読む)
加減速度制御装置、加減速度制御方法
【課題】アクセル操作子にブレーキ操作子の機能を統合した場合の減速操作性を向上させる。
【解決手段】操作量Saに応じて目標加減速度Gaを設定し、操作量Sbに応じて目標加減速度Gbを設定する。そして、目標加減速度Ga設定手段で設定した目標加減速度Gaと目標加減速度Gb設定手段で設定した目標加減速度Gbとを加算した目標加減速度に応じて、車両の加減速度を制御する(S104、S105)。そして、統合操作制御モードの場合(S101の判定が“No”)、操作量Saが0よりも大きな閾値thであるときには目標加減速度Gaを0とし、操作量Saが閾値thよりも小さいほど目標加減速度Gaの実数を負側に小さくする(S106)。また、操作量Sbが大きいほど目標加減速度Gbの実数を負側に小さくする(S107)。
(もっと読む)
61 - 70 / 2,189
[ Back to top ]