
国際特許分類[B60W10/20]の内容
処理操作;運輸 (1,245,546) | 車両一般 (234,424) | 異なる種類または異なる機能の車両用サブユニットの関連制御;ハイブリッド車両に特に適した制御システム;特定の単一のサブユニットの制御に関するものではない、特定の目的のための道路走行用車両の運動制御システム (34,847) | 異なる種類または異なる機能の車両用サブユニットの関連制御 (21,615) | 操向装置の制御を含むもの (589)
国際特許分類[B60W10/20]に分類される特許
41 - 50 / 589
車両の制御装置
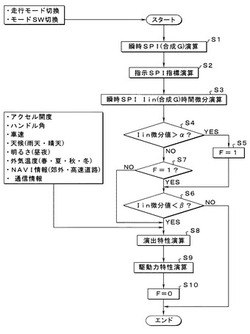
【課題】車両の走行環境や運転指向をより的確に反映させて走行特性および人間の間隔に刺激を与える演出装置を制御する。
【解決手段】車両の走行状態に基づく指標を求め(ステップS2)、該指標に応じて前記車両の走行特性を変化させる車両の制御装置において、前記指標は、前記車両の挙動が機敏になるように前記走行特性を変化させる方向には前記走行状態の変化に応じて迅速に変化し、かつ前記車両の挙動の機敏さが低下するように前記走行特性を変化させる方向には前記走行状態の変化に対して遅れて変化する指標を含み、前記車両の運転者の五感の少なくとも一部に刺激を与える演出装置の出力内容を前記指標に基づいて変化させる(ステップS8,S9)ように構成されている。
(もっと読む)
走行制御装置

【課題】車両を基準位置から目標位置まで走行させる走行経路を生成する場合に、より好適な走行経路を生成できる走行制御装置を提供すること。
【解決手段】走行制御装置では、経路パターンを組み合わせて、仮の走行経路を生成するが、仮の走行経路の生成を開始する場合には、車両の現在の車両位置と、目標とする駐車位置によって決まる位置と、車両の車両方位との3つの条件に基づいて、又は、車両の現在の操舵角に基づいて、10の経路パターンに優先順位を設定する。そして、優先順位の高いものから順に、まず、1個の経路パターンで仮の走行経路を生成する。この優先順位は、走行経路を生成する場合に、3つの条件に対して相応しい走行経路を生成するためのものなので、仮の走行経路を生成する場合に、3つの条件に対して相応しい仮の走行経路を生成できる。よって、より好適な走行経路を生成できる。
(もっと読む)
車両の制御装置
【課題】車両の走行環境や運転者の嗜好・走行意図を車両の挙動の制御特性により的確に反映させて、運転者の満足度およびドライバビリティを向上させることのできる車両の制御装置を提供すること。
【解決手段】加速度が変化することに基づいて走行特性を変化させる車両の制御装置において、前記加速度が変化したことにより前記走行特性を変更する場合に、前記加速度が変化する直前に設定されていた変更前の前記走行特性に基づいて変更する前記走行特性の変更量を調整する走行特性変更手段(ステップS2)を設けた。
(もっと読む)
走行制御装置
【課題】予め用意しておく走行経路パターンの数を抑制しつつ、車両を基準位置から目標位置まで走行させる走行経路を生成する可能性を向上させることができる走行制御装置を提供すること。
【解決手段】走行制御装置100では、経路パターンPT1〜PT10を用いて仮の走行経路RT1を生成し、その仮の走行経路RT1ついて駐車可能条件が成立しない場合、その仮の走行経路RT1の終端から10通りの方向に走行経路を延長するように、10通りの新たな仮の走行経路RT1を一つずつ順番に生成していく。よって、経路パターンの種類が多くなくても、生成する仮の走行経路RT1の数を増やすことができ、駐車可能条件が成立する可能性を高めることができる。従って、予め用意しておく経路パターンPT1〜PT10の数を抑制しつつ、走行経路RT1〜RT3が生成される可能性を向上させることができる。
(もっと読む)
車線推定装置
【課題】走行安定性と車線追従制御性との双方を満足させることのできる目標走行線を設定する。
【解決手段】車線候補点設定部9aは撮像手段1で撮像した画像から走行車線の内側エッジを検出し車線候補点Pをプロットする。曲線近似処理部9bは車線候補点Pの点列に基づき、最小二乗法から推定車線Lpを求める車線推定式(y=ax2+bx+c)のパラメータ係数a,b,cを求め、今回の演算時を基準として設定時間幅tw前におけるパラメータ係数aの点列から曲線近似式を求め、この曲線近似式から設定時間進み後の予測パラメータ係数a’を設定する。車線位置設定部9cは予測パラメータ係数a’を、車線推定式に代入して設定時間進みtf後の推定車線Lpを求める。
(もっと読む)
車両の制御装置
【課題】車両の走行環境や運転者の嗜好・走行意図を車両の挙動の制御特性により的確に反映させるとともに、制御の際の制御遅れを防止もしくは抑制して、運転者の満足度およびドライバビリティを向上させることのできる車両の制御装置を提供すること。
【解決手段】車両の走行状態に基づいて指標を求め、その指標に応じて車両の走行特性を変更するように構成された車両の制御装置において、前記走行特性を変更する際に目標とする目標特性を前記指標に基づいて設定し、その目標特性に実際の前記走行特性を追従させるように制御する走行特性制御手段(ステップS1,S2,S6)と、前記目標特性と前記実際の走行特性との乖離が大きい場合に、前記目標特性もしくは前記指標を、前記目標特性が前記実際の走行特性に近づくように補正する目標特性補正手段(ステップS3,S4,S5,S6)とを設けた。
(もっと読む)
車両の制御装置
【課題】車両の走行環境や運転指向をより的確に反映した走行特性とすることによりドライバビリティを向上させる。
【解決手段】走行している車両の状態に基づいてパラメータ(指標)を求め、前記車両に搭載されているアクチュエータの制御量をそのパラメータに基づいて決定する車両の制御装置において、前記パラメータに対する前記制御量を複数のアクチュエータ毎に予め設定しておき、前記パラメータが求められた場合にその単一のパラメータに基づいて前記複数のアクチュエータ毎の制御量を求める(ステップS31,S32,S33)とともにその制御量に基づいて各アクチュエータを制御するように構成されている。
(もっと読む)
車両用挙動制御装置
【課題】カーブ進入時だけでなくカーブ内においてもドライバの危険感に合った減速制御を実行することができる車両用挙動制御装置を提供する。
【解決手段】自車がカーブ内に位置すると判定した場合には、減速制御において、接近離間状態評価指標KdBに基づいた第1修正目標相対速度算出式を適正道路境界距離とカーブ内適性道路境界距離との差分をもとに修正した第2修正目標相対速度算出式を用いて第2修正目標相対速度を算出する。
(もっと読む)
運転支援装置
【課題】旋回半径が変化するような場合であっても、適切な目標軌道を設定することが可能な運転支援装置を提供すること。
【解決手段】前方道路を含む所定エリアに設定した複数のポイントの運動に関して、車両の運転者の注視点への視線方向を軸として、その軸周りで回転する回転運動成分を算出し、回転運動成分の大きさが等しい等ポテンシャルラインを車両の目標軌道として設定する。これにより、車両が旋回しようとするカーブ路の旋回半径が途中で変化している場合であっても、その旋回半径の変化に応じて動的に回転運動成分の強度分布も変化するので、等ポテンシャルラインにより適切な目標軌道を設定することができる。
(もっと読む)
車両制御装置
【課題】個々のコントローラの冗長度を必要以上に上げることなく、システム全体でエラーをバックアップすることにより、簡潔なECUの構成で、低コストで、高い信頼性とリアルタイム性と拡張性とを確保した車両制御装置を提供する。
【解決手段】センサ信号を取り込むセンサコントローラと、センサコントローラが取り込んだセンサ信号に基づいて制御目標値を生成する指令コントローラと、指令コントローラから制御目標値を受けて車両を制御するためのアクチュエータを作動させるアクチュエータコントローラがネットワークで接続される車両制御装置であって、アクチュエータコントローラは、指令コントローラが生成する制御目標値に異常が生じたときには、当該アクチュエータコントローラが受信したネットワーク上のセンサコントローラのセンサ値に基づいて制御目標値に生成する制御目標値生成手段を有し、生成した制御目標値によってアクチュエータを制御する。
(もっと読む)
41 - 50 / 589
[ Back to top ]