
国際特許分類[B60W10/20]の内容
処理操作;運輸 (1,245,546) | 車両一般 (234,424) | 異なる種類または異なる機能の車両用サブユニットの関連制御;ハイブリッド車両に特に適した制御システム;特定の単一のサブユニットの制御に関するものではない、特定の目的のための道路走行用車両の運動制御システム (34,847) | 異なる種類または異なる機能の車両用サブユニットの関連制御 (21,615) | 操向装置の制御を含むもの (589)
国際特許分類[B60W10/20]に分類される特許
71 - 80 / 589
車両の運動制御装置
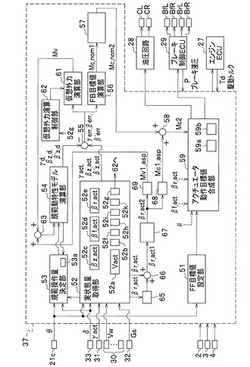
【課題】車両の操作状態量や運動状態量を検知するセンサからの信号が異常な場合にも、運転者に違和感を与えない車両の運動制御装置を提供する。
【解決手段】車両の運動制御装置は、コントロールユニット37、並びに、センサ2,3,4,30,31,32,33等を含んで構成されている。実状態量取得部52は、実車体横滑り角βz_act、実ヨーレートγactを偏差演算部55に入力する。規範動特性モデル演算部54は、動特性モデルを用いて、規範車体横滑り角βz_d、規範ヨーレートを算出して偏差演算部55に入力する。仮想外力演算部61は、偏差演算部55から出力される偏差にもとづいて、規範動特性モデル演算部54に仮想外力Mvをフィードバックする。このとき、仮想外力演算制御部62が、前記したセンサからの信号の検知状態にもとづいて、仮想外力の補正を制御する。
(もっと読む)
車両用運動制御装置

【課題】ドライバへの操作負担を軽減できるステアリング制御とブレーキ制御の協調制御を行う車両用運動制御装置を提供する。
【解決手段】ステアリング制御とブレーキ制御のいずれをメインに行うかを選択し、その選択結果に基づいて、メインとされる側に対して行わせる車両旋回運動の要求値を出力すると共に、メインとされない側に目標値とメイン側要求値との差に応じた要求値を出力することで、ステアリング制御とブレーキ制御それぞれの配分を適切に設定する。これにより、ステアリング制御をメインとしつつブレーキ制御による補助を行うことが可能となるため、ステアリング制御のみの場合よりも目標値追従性を向上させた車両運動制御が行える。そして、ドライバへの操作負担を軽減できるステアリング制御とブレーキ制御の協調制御を行うことが可能となる。
(もっと読む)
走行制御装置および走行制御方法
【課題】車両の安全を確保しつつ、車両に走行経路上をより先に進行させることができる走行制御装置および走行制御方法を提供すること。
【解決手段】走行制御装置100は、走行経路RT1を、経路パターンPT1〜PT10に対応する走行経路ごとに区切ってセクションを設定する。そして、車両1が走行経路RT1を自律走行している場合、車両1が現在走行しているセクションのうち、車両1の現在位置からそのセクションの終端までの走行領域を、車両1がこれから通過する予定の領域(通過予定領域)KFと設定し、その通過予定領域KF内に障害物が存在しない間、車両1にセクション内を進行させる。よって、障害物が存在するセクションの手前までは車両1を進行させることができるので、車両1の安全を確保しつつ、車両1に走行経路上RT1〜RT3をより先に進行させることができる。
(もっと読む)
走行制御装置および走行制御方法
【課題】複雑に設定された走行経路に沿って車両を問題なく自律走行させることができる走行制御装置および走行制御方法を提供すること。
【解決手段】パターン走行部RT1は、経路パターンPT1〜PT10に対応する走行経路ごとに区切られセクションが設定される。走行制御装置100は、車両1にパターン走行部RT1を自律走行させる場合、車両1に各セクションを第1セクションから順番に、セクション単位で走行させる。よって、車両1が現在走行しているセクションと、他のセクションとが接近していたり、交差している場合でも、車両1が他のセクションを走行し始めることがないので、車両1に現在走行中のセクションを継続して走行させることができる。従って、複雑に設定された走行経路に沿って車両を問題なく自律走行させることができる。
(もっと読む)
車両制御装置
【課題】制動回避が困難な場合において操舵回避を適切に行うことが可能な車両制御装置を提供する。
【解決手段】車両制御装置1は、ECU5を備え、このECU5により、障害物に対する制動回避制御を行うために必要な必要減速度が算出されると共に、車両10の走行状態に基づいて制動回避制御を行うために車両10が実行可能な目標となる目標減速度が算出される。そして、ECU5により、必要減速度と目標減速度との差に基づいて、障害物に対する操舵回避制御の開始タイミングΔtが算出される。よって、必要減速度が目標減速度よりも大きく、制動回避制御が困難な場合、減速度の不足に応じて操舵回避制御の開始タイミングが決定されることとなる。
(もっと読む)
走行制御装置および走行制御方法
【課題】車両を自律走行させる場合に車両の搭乗者に与える不快感を軽減できる走行制御装置および走行制御方法を提供すること。
【解決手段】車両1を自律走行させると、運転者を含む搭乗者に前触れもなく、突然切り返しが行われる場合があり、予測の困難な前後Gが車両1の搭乗者に加わることがある。本実施形態の走行制御装置100は、車両1の前進および後退を切り換える切り返し地点に車両1が到着する場合に、車両1の車両速度Vに基づいてクッションタイムを設定する。クッションタイムが設定されると、切り返し地点において車両1が所定時間停車させられるので、車両1が停車している間に、車両1の搭乗者に加わっている前後Gを緩和させることができる。よって、車両1の搭乗者に与える不快感を軽減できる。
(もっと読む)
走行制御装置
【課題】車線変更の際に、自車両の横移動を抑制しようとする不適当な制御介入を防ぐ。
【解決手段】側方車両を検出している状態で(ステップS7の判定が“No”)、自車両の後刻横位置Xfが作動閾値Xaを超えたら(ステップS19の判定が“No”)、左右輪の制動力差によって側方車両の側とは逆方向へのヨーモーメントを発生させる(ステップS21)。但し、側方物体を検出していない状態で(ステップS7の判定が“Yes”)、自車両が車線変更のために隣接車線への進入を開始していれば(ステップS11又はS14の判定が“Yes”)、作動抑制フラグをFc=1にセットすることで(ステップS12)、その後に側方物体が現れても(ステップS7の判定が“No”)、接近防止制御の作動を抑制する(ステップS17の判定が“Yes”)。
(もっと読む)
車輪の制動力推定装置、及び、該装置を備えた車両の運動制御装置
【課題】
摩擦部材の摩擦係数に変動があっても、適正に各車輪の制動力を推定できる車輪の制動力推定装置を提供する。また、該装置によって推定された制動力に基づいて、車両の運動を安定化する車両の運動制御装置を提供する。
【解決手段】
車輪の制動力推定装置は、車両の各車輪に制動力を発生させる制動手段の摩擦部材の押付量を取得する押付量取得手段と、前記車両の前後加速度を取得する前後加速度取得手段と、前記前後加速度に基づいて前記車両に作用する減速力を演算し、該減速力及び前記押付量に基づいて前記制動力を推定する。前記推定手段は、前記車両の全ての車輪の前記押付量の総和に対する前記車両の1つの車輪の前記押付量の比率を、前記減速力に乗じることにより前記制動力を推定する。さらに、前記推定制動力に基づいて、制動制御及び操舵制御のうち少なくとも一方を実行して前記車両の運動を安定化する。
(もっと読む)
車両の速度制御装置
【課題】各車輪の目標車輪速度を適切に設定し、車両旋回状態にて各車輪の不要な前後スリップの発生を抑制しつつ小回り性を向上し得る車両の速度制御装置を提供すること。
【解決手段】この装置では、操舵角δfgと、車両のステアリングジオメトリ(Rov=L/tan(δfg))とに基づいて車両の基準位置(点O)が決定され、この基準位置から車両に近い側に車両の旋回中心(点P)が決定される。この旋回中心と、運転者により設定される指示車速とに基づいて目標角速度ωptが演算される。この目標角速度と、旋回中心からの各車輪の距離Rpw[**]とに基づいて、各車輪の目標車輪速度Vwt[**]が決定される。これにより、車輪間の移動軌跡差に起因する車輪間での車輪速度差が確保され且つ小回り性が向上するように各車輪の目標車輪速度が個別に決定される。車輪間の移動軌跡差に起因する不要な前後スリップが補償されつつ、車速が指示車速に近づく。
(もっと読む)
視線技術、死角インジケータ及びドライバ経験を用いる予測ヒューマン・マシン・インタフェース
【課題】 車両における事故予防システム及び方法を改善すること。
【解決手段】 車両における事故を予防するシステム及び方法を開示する。そのシステムは、ドライバから視線ベクトルを受け取る視線検知器を備える。そのシステムは、近隣の複数の物体の位置及びそれらの速度を検出する近接センサをさらに備える。車両事故リスクを、その近隣の物体の位置及び速度に基づいて判定する。さらに、車両の周囲の状況に関するドライバの認識を、その近隣の物体の位置及び速度に加えて、視線位置にも基づいて判定する。そのドライバの認識及びその車両事故リスクに応じて、車両警報を起動する。
(もっと読む)
71 - 80 / 589
[ Back to top ]