
国際特許分類[B60W10/20]の内容
処理操作;運輸 (1,245,546) | 車両一般 (234,424) | 異なる種類または異なる機能の車両用サブユニットの関連制御;ハイブリッド車両に特に適した制御システム;特定の単一のサブユニットの制御に関するものではない、特定の目的のための道路走行用車両の運動制御システム (34,847) | 異なる種類または異なる機能の車両用サブユニットの関連制御 (21,615) | 操向装置の制御を含むもの (589)
国際特許分類[B60W10/20]に分類される特許
51 - 60 / 589
振動付与構造検出装置及び車両制御装置
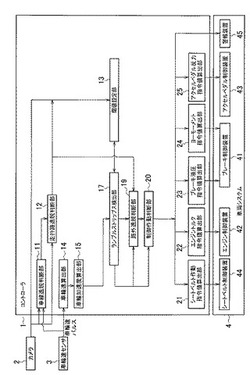
【課題】車両が振動付与構造に接触することを高精度に検出できる振動付与構造検出装置等を提供する。
【解決手段】コントローラ(1)は、自車両が走行車線から逸脱する可能性である車線逸脱傾向が有るかを判断する車線逸脱判断部(11)と、路面から自車両に入力される振動を検出する振動検出手段(3,14-16)と、検出された振動のうち振幅が予め定められた所定の振幅閾値以上である振動の周波数が所定の周波数範囲である場合に、自車両が走行する走行路外であって走行路の延在方向に沿って設けられ車両に振動を付与する振動付与構造に対して車両の車輪が接触していると判断するランブルストリップス検出部(17,18)と、振幅閾値を設定する周波数閾値設定部(13)とを備え、周波数閾値設定部(13)は、車線逸脱判断部(11)によって車線逸脱傾向が有ると判断されている場合に、車線逸脱傾向が有ると判断されていない時の振幅閾値に比して、振幅閾値を小さい値に設定する。
(もっと読む)
操舵力制御装置

【課題】車両姿勢が不安定になる状況下での車両の加速時あるいは発進時において、簡素な構成で適切な操舵補助力を付加でき、ハンドル取られなどの発生しない車両の安定性向上を図れる操舵力制御装置を提供する。
【解決手段】μスプリット路面上での車両発進時あるいは車両加速時において、左前輪または右前輪が空転したときの車両姿勢が不安定になる状況に対し、車両発進時あるいは車両加速時の車輪速センサにより検出した左前輪の車輪速と、車輪速センサにより検出した右前輪の車輪速と、左前輪と右前輪との車輪速差の変化率とをもとに、適切な操舵補助力を付加し、簡素な構成でコストの増加を招くことなく、μスプリット路面上での車両の発進時あるいは加速時におけるハンドル取られなどを回避して車両の安定性向上を図る。
(もっと読む)
車両の制御装置
【課題】 所定の条件が成立したときにクリープを禁止する制御と駐車支援制御とが干渉しないようにして運転者の違和感を解消する。
【解決手段】 所定の条件が成立したときにベルト式無段変速機13をインギヤ状態からニュートラル状態に移行してクリープを禁止するように構成した車両の制御装置において、駐車支援装置は、運転者が車両をクリープ走行させながら駐車する間に運転者のステアリング操作をアシストする。駐車支援装置の作動時には、所定の条件が成立しても、電子制御ユニットはベルト式無段変速機13をインギヤ状態からニュートラル状態に移行してクリープを禁止することなく、ベルト式無段変速機13をインギヤ状態に維持してクリープを可能にするので、クリープ禁止制御と駐車支援制御とが干渉するのを防止して運転者の違和感を解消することができる。
(もっと読む)
車両の統合制御装置
【課題】自動操舵機構の有する過渡時における応答性の問題を適切に補償して、通常走行時の快適性を保つことはもちろん、理想のハンドリング性能を実現する。
【解決手段】制御ユニット50の操舵制御部20では、ハンドル角θHd、ハンドル角速度(dθHd/dt)により目標舵角δtを算出し、モータ回転角θMを算出して、このモータ回転角θMを、ギヤ、モータの慣性等に起因する振動を抑制する為、所定のローパスフィルタによる処理や不感帯処理を行って、モータ駆動部21に出力する。サス_ECU40では、ハンドル角速度(dθHd/dt)に基づいて、減衰力補正基本値Cpを設定し、減衰力補正値Cを算出して、ストローク速度(dST/dt)、減衰力補正値Cを基に減衰力Faを設定し、所定のローパスフィルタによる処理等を行って出力する。
(もっと読む)
車両の走行制御装置
【課題】車両の目標軌跡や実軌跡を求めるための車外情報の取得を要することなく、車両の軌跡が運転者の希望に則した軌跡になるよう操舵輪の舵角及び左右輪の前後力差を制御する。
【解決手段】運転者の操舵操作量に対する前輪の舵角の関係を変更する舵角可変装置14又はバイワイヤ式の操舵装置76を備えた車両の走行制御装置。車両の軌跡の制御を開始又は更新すべきと判定したときには(S350、450)、その時点に於ける運転者の操舵操作量及び車速に基づいて車両が目標進行方向にて目標到達位置に到達するに必要な目標軌跡に沿って車両を走行させるための前輪の目標舵角を演算し(S500)、一方の後輪の目標付加制動力を演算する(S1050)。そして目標舵角に基づいて前輪の舵角を制御し(S600)、目標付加制動力に基づいて後輪の制動力を制御する(S1060〜1100)。
(もっと読む)
運転操作支援装置及び運転操作支援方法
【課題】運転者に違和感をより低減しつつ、回避支援をすることが可能な運転操作支援の技術を提供する。
【解決手段】障害物に対し自車両MMが緊急回避状況であると判定すると、緊急回避のための制御として操舵制御と制動制御の両方の制御を行い、自車両MMが障害物回避を完了したと判定すると、緊急回避のための制御の解除待機モードに移行し、自車両MMの車両状態が安定したと判定すると上記緊急回避のための制御を解除する。但し、上記解除待機モード中に、運転者による意図的なアクセル操作介入を検出すると、自車両MMの車両状態が安定したと判定する前であっても、制動制御のみ先に解除する。
(もっと読む)
衝突回避支援装置
【課題】 運転者の衝突回避行動に応じた適切な衝突回避支援を実現できる衝突回避支援装置を提供する。
【解決手段】 衝突回避支援装置は、自車速Vを検出する車速センサ1と、障害物のX方向(自車進行方向に対し横切る方向)への動きである障害物移動状態(移動速度Vp)を検出するレーザレーダ4、カメラ5および画像処理装置6と、自車速Vと障害物移動状態(移動速度Vp)とに基づいて、制動回避制御と操舵回避制御の重み付けを設定する重み付け設定部11aと、を備える。
(もっと読む)
ドライバ状態検出装置
【課題】ドライバの意識喪失状態をより早い段階で検出することができるドライバ状態検出装置を提供する。
【解決手段】本発明に係るドライバ状態検出装置1では、ドライバの操舵特性であるモデルパラメータを予め算出し、車線と車両の偏差に対して、そのドライバが本来操作すると考えられる推定舵角を算出する。その推定舵角と実舵角とのずれに基づいて見かけ上の目標コースを算出し、意識喪失判定に用いる。見かけ上の目標コースが車線中心から単調に外れた場合には、それは意識喪失状態であると判断する。また、モデルパラメータが小さい場合に発生する誤判定を回避するために、自車両の進行方向の延長線上に見かけ上の目標コースがある場合にのみ意識喪失判定を行う。
(もっと読む)
自動耕作方法、及び自動耕作システム
【課題】農地における農作業を効率よく簡便に行えるようにする。
【解決手段】隣接配置された複数のアンテナを備える基地局200を農地4の近傍に設け、アンテナの夫々から無線信号を送信し、農機300に、情報処理装置と、アンテナの夫々から送信される無線信号の位相差に基づき自身の現在位置を標定する位置標定装置411とを設け、サーバ装置100に、農機300による農作業の対象となる農地4について、農機300が、直進走行、農地4の境界近傍での180°方向転換、及び当該方向転換前の当該経路から所定の間隔をあけての直進走行の再開、を順に繰り返し行うようにコースを生成し、生成したコースを農機300に送信し、農機300が、位置標定装置によって標定される現在位置と受信したコースとに基づきコースに沿って自律走行するようにする。
(もっと読む)
車両運動制御装置及びプログラム
【課題】簡単な構成のマップを用いて、移動する障害物を回避するための車体合成力及び回避軌道を導出する。
【解決手段】障害物を回避直後の速度方向及び車体合成力の最大値を設定し、自車両の速度のx成分vx0、y成分vy0、障害物の速度のy成分Zv、位置のy成分Z0、及び車体合成加速度の最大値F0/mを用いた各々異なる3つのパラメータを演算し、3つのパラメータと、障害物を回避しながら設定した速度方向に移動する際、車体前後方向の移動距離を最小化する車体合成力を求めるために導入した第1の導入パラメータν1の特定仮定下での値ν1’との関係、第2の導入パラメータν2の特定仮定下での値ν2’との関係、障害物の回避に要する時間teの特定仮定下での時間te’との関係を定めた最短3次元マップを用いて、障害物を回避しながら設定した速度方向に移動する際、車体前後方向の移動距離を最小化する車体合成力を導出する。
(もっと読む)
51 - 60 / 589
[ Back to top ]