
国際特許分類[B60W10/20]の内容
処理操作;運輸 (1,245,546) | 車両一般 (234,424) | 異なる種類または異なる機能の車両用サブユニットの関連制御;ハイブリッド車両に特に適した制御システム;特定の単一のサブユニットの制御に関するものではない、特定の目的のための道路走行用車両の運動制御システム (34,847) | 異なる種類または異なる機能の車両用サブユニットの関連制御 (21,615) | 操向装置の制御を含むもの (589)
国際特許分類[B60W10/20]に分類される特許
61 - 70 / 589
自律走行制御装置
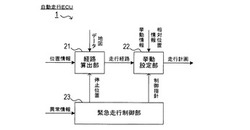
【課題】緊急時に車両の状態に応じてより迅速かつ的確な走行制御を行うことが可能な自律走行制御装置を提供する。
【解決手段】自律走行ECU1では、車両の周囲の状況(相対位置情報)に応じて走行計画を設定すると共に、他のECUからの異常情報に基づいて車両を緊急停止させる必要があると判定した場合には、制御系統の異常部位以外の特定部位である使用可能部位と予め設定された緊急停止モードとから一意に決まる制御指針に従って、車両を停止させるための走行計画を再設定する。しかも、車両における乗員および危険物の有無の少なくとも一方の情報に基づいて緊急停止モードを選択し、車内優先モードまたは車外優先モードのいずれかを走行計画の再設定に反映させることにより、緊急時の車内の状況に応じて、車両と車両の周囲とのいずれかの安全を的確に重視した制御を行うことが可能となる。
(もっと読む)
マップデータを使用する乗物ESCシステムのための方法及びシステム

【課題】乗物用の改良型電子安定性制御システムを提供する。
【解決手段】乗物用の電子安定性制御(ESC)システムが開示される。電子制御ユニット(ECU)は、乗物のブレーキ及びスロットルの動作に変更を加えることで、意図された乗物方向及び/又はヨーレートと、実際の乗物方向及び/又はヨーレートとの間の差を減少することにより、乗物の横滑りを減少するようにプログラムされる。ESCシステムは、車輪速度センサ、ハンドル位置センサ、ヨーレートセンサ、及び横方向加速度センサから入力を受け取る。又、ESCシステムは、乗物が位置している道路の特性を少なくとも指示する入力も受け取り、乗物が位置する道路は、マップデータベースを使用するポジショニングシステムから決定され、又、特性は、マップデータベースから決定される。
(もっと読む)
車両の制御装置
【課題】車両の旋回挙動を規定するヨーレート及び車体スリップ角を所望の値に制御する。
【解決手段】前輪及び後輪の各々について左右制駆動力差を生じさせることが可能な制駆動力可変手段を備えた車両を制御する装置は、前記車両の目標運動状態を規定するヨーレート及び車体スリップ角を少なくとも含む車両状態量の目標値を設定する設定手段と、予め設定された、前記車両状態量と前記各々における左右制駆動力差を少なくとも含む状態制御量との相対関係を規定する車両運動モデルに基づいて、前記設定された車両状態量の目標値に対応する前記状態制御量の目標値を決定する決定手段と、前記各々における左右制駆動力差が前記決定された目標値となるように前記制駆動力可変手段を制御する制御手段とを具備する。
(もっと読む)
自動車運転支援装置および自動車
【課題】大きな力で自動車操縦機器を一定位置または角度で保持する必要がある状況であっても、アクチュエータのエネルギー消費を抑制し、機器の寿命を確保すると共に、装置の小型化を図る。
【解決手段】自動車の運転を支援する自動車運転支援装置であって、駆動力を発生するアクチュエータと、前記アクチュエータが発生した駆動力を一方向にのみ伝達する不可逆機構と、前記不可逆機構から伝達される駆動力を伝達しまたは切断する切り替え機構と、前記駆動力切断機構が前記不可逆機構から伝達される駆動力を伝達するときに、自動車操縦機器へ前記駆動力を伝達する駆動力伝達機構と、を備える。
(もっと読む)
車両の制御装置
【課題】ヨーレートの発生を抑制しつつ車両を目標とする運動状態に維持する。
【解決手段】前輪(FL、FR)又は後輪(RL、RR)の舵角を、該舵角の変化を促すドライバ操作から独立して変化させることが可能な舵角可変手段(400)と、前記前輪及び後輪の各々について左右制駆動力差を生じさせることが可能な制駆動力可変手段(300、600)とを備えた車両(10)を制御する装置(100)は、平行移動を実現するための、該平行移動を規定する複数の第1状態量の目標値を設定する第1設定手段と、予め設定された前記複数の第1状態量と前記舵角及び前記左右制駆動力差に夫々相関する複数の第2状態量との相対関係を規定する車両運動モデル、並びに前記設定された複数の第1状態量の目標値に基づいて、前記平行移動を実現するための前記複数の第2状態量の目標値を設定する第2設定手段とを具備する。
(もっと読む)
車両の制御装置
【課題】車両の走行環境や運転指向をより的確に反映した走行特性とすることによりドライバビリティを向上させる。
【解決手段】車両の運動を示す車両パラメータに基づいて該車両の走行状態を示す指標が求められ、該指標に応じて該車両の走行特性を設定する車両の制御装置において、運転者の意図しない運転操作や走行路面の影響に起因して変動する変動成分を減衰させた前記加速度に基づいて前記指標を求めるノイズ除去装置を設けた車両の制御装置である。
(もっと読む)
車両の制御装置
【課題】操舵輪から伝達される操舵反力を迅速且つ正確に推定する。
【解決手段】
前輪及び後輪のうち少なくとも一方の舵角を変化させることが可能な舵角可変手段(200)と、前輪及び後輪のうち少なくとも一方における左右輪の制駆動力差を変化させることが可能な制駆動力可変手段(600)とを備えた車両(10)を制御する装置(100)は、車両の目標運動状態に対応する複数の目標状態量を設定する設定手段と、車両の運動状態が目標運動状態となるように、設定される複数の目標状態量に応じて舵角可変手段及び制駆動力可変手段を制御する運動制御手段と、設定される複数の目標状態量の各々、設定された複数の目標状態量に応じた上記少なくとも一方の舵角及び設定された複数の目標状態量に応じた上記少なくとも一方における左右輪の制駆動力差のうち複数の要素に基づいて、操舵反力を推定する推定手段とを具備する。
(もっと読む)
車両運動制御装置及びプログラム
【課題】車体合成力の最大値が楕円で制限される場合において、簡単な構成のマップを用いて所望の縦移動距離に対する横移動距離を最大にする軌道及び車体合成力を導出する。
【解決手段】車体合成力の最大値が縦横比γ0の楕円で制限される場合において、車体合成力の最大値及び所望の縦移動距離Xeを設定して、車体合成加速度の最大値の車体前後方向の成分F1/m、縦横比γ0、縦移動距離Xe、自車両の速度の車体前後方向の成分vx0、及び車体横方向の成分vy0により演算される第1及び第2のパラメータと、横移動距離Yeを最大にする軌道を導出するために導入された第1の導入パラメータμ1に関する値、第2の導入パラメータμ2に関する値、及び特定の条件の下、XsとYeとで示される位置に到達する時間との関係を定めたマップを用いて、所望の縦移動距離に対して横移動距離が最大となる軌道及び車体合成力を導出する。
(もっと読む)
運転支援装置
【課題】本発明は、リスク回避の確実性の向上が可能な運転支援装置を提供することを目的とする。
【解決手段】運転支援装置1は、車両の運転者に対して、車両の運転におけるリスクの対象となる対象物を回避するために運転支援を実施する装置であって、運転者の視線を検出するドライバ状態検出部4と、運転者が対象物を注視しているか否かを判定する注視判定部13と、各運転支援形態における制御介入度を調整する制御介入度調整部20と、運転支援形態及び調整された制御介入度に基づき、運転支援のための制御を実施する運転支援制御部15とを備え、制御介入度調整部20は、注視判定手段により運転者が対象物を注視していると判定されなかった場合に、注視していると判定された場合と比較して制御介入度を大きくする。
(もっと読む)
運転支援装置、及びその方法
【課題】複数の注意対象が存在する場合には、常に運転支援制御の内容を変更する処理をすることのできる運転支援装置、及びその方法を提供する。
【解決手段】車両の周囲の状況を示す状況情報を取得する取得手段と、予め定められた設定値にしたがって車両の走行状態の制御をする制御手段と、制御手段によって走行状態の制御が開始される前に、取得手段によって、予め定められた2種類以上の状況を示す状況情報が取得されたとき、設定値を変更する変更手段とを備える。
(もっと読む)
61 - 70 / 589
[ Back to top ]