
国際特許分類[B60W40/08]の内容
処理操作;運輸 (1,245,546) | 車両一般 (234,424) | 異なる種類または異なる機能の車両用サブユニットの関連制御;ハイブリッド車両に特に適した制御システム;特定の単一のサブユニットの制御に関するものではない、特定の目的のための道路走行用車両の運動制御システム (34,847) | 特定の単一のサブユニットの制御に関するものではない道路走行用車両の運動制御システムのためのパラメータの推定または演算 (1,216) | 運転者又は同乗者の状態に関するもの (279)
国際特許分類[B60W40/08]に分類される特許
71 - 80 / 279
衝突安全システム
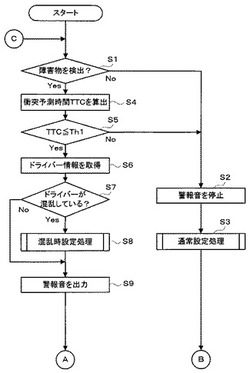
【課題】ドライバーの状態に応じて適切な車両操作の支援および車両制御の実行を可能とする衝突安全システムを提供する。
【解決手段】車両周囲の障害物を検出する障害物検出手段と、車両と障害物とが衝突する危険性が高いか否かを判定する衝突危険度判定手段と、衝突危険度判定手段によって衝突の危険性が高いと判定された場合に、車両の車室内において警報音を鳴動して衝突の危険性を車両のドライバーに報知する警報手段と、車両のドライバーが混乱しているか否かを判定する混乱判定手段とを備える、衝突安全システムであって、警報手段は、混乱判定手段によってドライバーが混乱していると判定された場合、警報音の音量をドライバーが混乱していないと判定された場合に比べて小さくする音量制御手段を含む、衝突安全システムである。
(もっと読む)
車両用走行制御装置

【課題】運転者に違和感を感じさせず、運転者の志向に合わせることができ、複数の個人が運転者として利用できる車両用走行制御装置を提供する。
【解決手段】先行車情報を検出する先行車センシング部2と、自車情報を検出する自車センシング部3と、過去の先行車情報及び自車情報を蓄積する学習データストア部4と、先行車情報と自車情報とパラメータとに基づいて自車が先行車に追従するための目標加速度をドライバモデル式により算出する目標加速度演算部5と、目標加速度演算部5により算出された目標加速度と運転者が手動で先行車に追従する運転をしたときの加速度との差を最小にするパラメータを同定して運転者固有の個人パラメータとする個人パラメータ部分同定部6とを備える。
(もっと読む)
車両走行制御装置
【課題】この発明は、先行車の不安定な運転状態を精度良く検出し、運転者に警告し、通常よりも長めの車間距離で追従走行し、先行車を避けて車線変更することで、自車の不安定な挙動を抑制した追従走行が可能な車両走行制御装置を実現することを目的とする。
【解決手段】この発明は、自車が先行車との車間距離を維持した状態で追従走行するよう自車の車両速度を制御する車両走行制御装置において、先行車の車線幅方向における位置である横位置を検出する先行車横位置検出手段と、先行車横位置検出手段により検出された先行車横位置の時系列データを周波数解析する先行車横位置周波数解析手段と、先行車横位置周波数解析手段により解析された先行車横位置の周波数解析結果から先行車の運転状態を判定する先行車運転状態判定手段とを備えることを特徴とする。
(もっと読む)
車両操作診断装置、車両操作診断方法及びコンピュータプログラム
【課題】車間距離に関する運転者の車両操作を安全性の面から適切に評価することを可能とした車両操作診断装置、車両操作診断方法及びコンピュータプログラムを提供する。
【解決手段】自車両が“減速制御型の車間距離制御システムの作動条件速度以上で走行した距離”に対する“減速制御型の車間距離制御システムによる自動減速制御が作動した走行距離”から“前方車両に基づく要因によって減速制御型の車間距離制御システムによる自動減速制御が作動した走行距離”を引いた値の割合Xを算出し、算出された割合Xが所定割合(例えば、10%)未満であった場合には、車両が安全運転を行っていると診断し、安全運転が行われていることを評価するように構成する。
(もっと読む)
運転行動推定装置
【課題】運転行動の推定精度を向上させる
【解決手段】アクセル開度A(t),ブレーキ操作量B(t),車速V(t)を要素とする運転データDU(t)={A(t),B(t),V(t)}を取得するとともに、自車両の現在位置から対象交差点の位置までの距離と、最新の車速データとに基づいて、対象交差点に到達するまでの残り時間τを算出する。ROM19bには、複数の異なる残り時間τ毎に、残り時間τから、予め設定されたテンプレート時間範囲(例えば5秒)までの間における運転者の典型的な運転行動を示す、停止行動テンプレートと右左折行動テンプレートと直進行動テンプレートとが記憶される。そして、算出された残り時間τに基づいて、残り時間τに対応した各運転行動のテンプレートを選択し、取得した運転データDU(t)の履歴と、選択したテンプレートとに基づき、対象交差点での運転者の運転行動を推定する。
(もっと読む)
車両用走行支援装置
【課題】提供されたアドバイスを、運転者がより容易に実現できるように補助することが可能な車両用走行支援装置を提供すること。
【解決手段】車両の走行状態及び/又は運転操作量についてアドバイスを行なうアドバイス出力手段と、車両の走行状態及び/又は運転操作量を検出する検出手段と、車両の位置を特定する車両位置特定手段と、過去に同一位置において前記検出手段により検出された走行状態及び/又は運転操作量に基づく統計値を算出する統計値算出手段と、を備え、前記検出手段により直近に検出された走行状態及び/又は運転操作量の、前記統計値算出手段により算出された統計値からの乖離が所定程度以内である場合に、前記統計値算出手段により算出された統計値を目標値とする自動制御を行なうこと特徴とする車両用走行支援装置。
(もっと読む)
車両運行制御システム、車両運行制御方法、車載装置、センタ装置およびプログラム
【課題】運転者、車種、ルートの組合せ数が膨大であっても燃費を向上させること。
【解決手段】個々の車両2に係る情報を収集してセンタ装置3に送信する情報収集部4と、個々の車両2に係るパラメータをセンタ装置3から受信して車両2の運行に係るパラメータを設定するパラメータ設定部5と、を備える車載装置6と、複数の車両2係る情報を管理する管理部7と、情報収集部4を介して収集した車両2に係る情報に基づき当該車両2を低燃費で運転するために適した車両2に係るパラメータを算出するパラメータ算出部12と、を備えるセンタ装置3を有する。
(もっと読む)
車間制御装置
【課題】運転者が感じる違和感を低減することができる車間制御装置を提供する。
【解決手段】車間制御装置1は、ECU2を備えている。ECU2は、先行車両に追従するように自車両10の走行を制御する。また、ECU2は、顔向きセンサ4及び車内機器5から出力された各信号値に基づいて運転者の顔向き及び車内機器5の操作状況を検出し、これらに基づいて運転者の走行に対する注意力の度合いを求め、かかる注意力の度合いに応じてACC制御の加速ゲイン値及び減速ゲイン値の少なくとも一方を変更する。よって、ACC制御の際、先行車両に対する注意力に応じて加減速勾配が制御されることとなる。
(もっと読む)
運転支援装置
【課題】周辺車両の動きの予測内容に基づいて自車両の運転を支援する運転支援装置を提供すること。
【解決手段】運転支援装置(E1)は、自車両が走行する道路に関する道路情報を取得する道路情報取得手段(100)と、自車両の周辺を走行する周辺車両の位置及び速度を含む車両情報を取得する車両情報取得手段(101)と、周辺車両を運転する運転者の行動履歴に関する情報を取得する行動履歴取得手段(102)と、道路情報取得手段(100)が取得する道路情報と車両情報取得手段(101)が取得する車両情報と行動履歴取得手段(102)が取得する周辺車両を運転する運転者の行動履歴とに基づいて周辺車両の動きを予測する動き予測手段(104)と、動き予測手段(104)が予測した周辺車両の動きに基づいて自車両の運転支援内容を決定する運転支援手段(105)と、を備える。
(もっと読む)
駆動力制御装置
【課題】運転者の操作遅れ等も加味して各輪に駆動力を配分することができる駆動力制御装置を提供することを課題とする。
【解決手段】本装置は、地図情報から、現在と先方のコーナー曲率を得て各々で規範ヨーレートを演算し、運転者のハンドル操作から運転者が望むヨーレートを演算し、現在車両で発生しているヨーレートを求め、これら3つのヨーレートの各々の差分から必要ヨーモーメントを求め、当該必要ヨーモーメントに現在の車両状態を引数として決定した重み係数を掛けたものの和を駆動力差による要求ヨーモーメントとし、当該要求ヨーモーメントより各輪の駆動力を求める。
(もっと読む)
71 - 80 / 279
[ Back to top ]