
国際特許分類[B60W40/08]の内容
処理操作;運輸 (1,245,546) | 車両一般 (234,424) | 異なる種類または異なる機能の車両用サブユニットの関連制御;ハイブリッド車両に特に適した制御システム;特定の単一のサブユニットの制御に関するものではない、特定の目的のための道路走行用車両の運動制御システム (34,847) | 特定の単一のサブユニットの制御に関するものではない道路走行用車両の運動制御システムのためのパラメータの推定または演算 (1,216) | 運転者又は同乗者の状態に関するもの (279)
国際特許分類[B60W40/08]に分類される特許
61 - 70 / 279
車両の制御装置
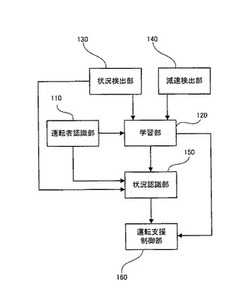
【課題】自動車等の車両において、適切なタイミングで運転支援制御を実行する。
【解決手段】車両の制御装置は、車両が停止する際の状況を検出する状況検出手段130と、車両が停止する際の運転者による減速タイミングを検出する減速検出手段140と、状況及び減速タイミングを互いに関連づけて学習を行う学習手段120と、学習後に、走行中の車両が学習された状況に近い状態となったことを認識する状況認識手段150と、状況に近い状態であることが認識された場合に、学習された状況に関連づけられた減速タイミングに応じて運転支援制御を行う運転支援制御手段160とを備える。
(もっと読む)
車両用運転支援装置

【課題】運転者の運転感覚に合致した最適な自動減速制御を行なうことが可能な車両用運転支援装置を提供すること。
【解決手段】車両が特定の位置を走行する際に自動減速制御を行なう制御手段を備える車両用運転支援装置であって、運転者のアクセル操作を検出するアクセル操作検出手段と、前記運転者のブレーキ操作を検出するブレーキ操作検出手段と、を備え、前記制御手段は、前記アクセル操作検出手段及び前記ブレーキ操作検出手段の検出結果を参照して前記運転者が一連の特定操作を行なったと判定した場合に、該一連の特定操作に含まれる操作の行なわれたタイミングを学習し、該学習したタイミングに基づいて、前記自動減速制御の制御区間を決定することを特徴とする、車両用運転支援装置。
(もっと読む)
運転解析システムおよび運転記録装置
【課題】運転者に対する安全運転教育のための運転記録を提供する運転記録装置および当該運転記録に基づいて運転状態の解析を行う運転解析システムを提供する。
【解決手段】ステレオカメラ1で撮影された画像データを記録する画像記録部2と、画像データから3次元画像情報を算出する3次元画像情報算出部3と、3次元画像情報に基づいて、画像中の動体対応画像部分を特定する動体特定部4と、3次元画像情報に基づいて自車両の速度を検出する速度算出部5と、動体との車間距離を検出する車間距離検出部6と、車間距離および速度算出部5で検出された自車両の速度等の運転情報を記録する記録部7を備えている。
(もっと読む)
走行支援装置、及び走行支援方法
【課題】走行支援装置において、例えば、車両を、より適切に走行支援することを可能とする。
【解決手段】走行支援装置(300)は、運転者が運転する一の移動体の周辺に位置する他の移動体の走行状態に応じて、一の移動体の走行支援を行う第1走行支援手段(351、305)と、運転者の運転特性に基づいて、一の移動体の走行支援を行う第2走行支援手段(352、305)と、第1走行支援手段によって設定された速度に関する第1速度変数の大きさが、第2走行支援手段によって設定された速度に関する第2速度変数の大きさと比較して大きい場合、第2速度変数を用いて、一の移動体の走行支援を行うように、第2走行支援手段を制御する制御手段(355、350)とを備える。
(もっと読む)
ドライバー状態推定装置及びドライバー状態推定方法
【課題】より精度良くドライバーの状態を推定することが可能なドライバー状態推定装置及びドライバー状態推定方法を提供する。
【解決手段】運転支援装置10の注意レベル推定部20は、ドライバーの注意レベルが低いレベルと高いレベルとの場合にTN、HV及びHRの3つのパラメータの標本値群を取得し、ベクトル空間上にプロットし、各標本値群中で平均値の点同士を結ぶ直線N1を法線とし、直線N1の中点M1を通る平面P1を設定する。注意レベル推定部20は、測定されたTN、HV及びHRが平面P1のいずれの側に位置するかでドライバーの注意レベルを推定する。ドライバーの注意レベルが異なる標本値群を3次元のベクトル空間上にプロットするため、標本値群中の標本値にバラツキがあっても、注意レベルの異なる標本値群同士を判別し易くなり、より精度良くドライバーの状態を推定できる。
(もっと読む)
車両制御装置
【課題】運転者の旋回意思を判定し、旋回に必要な制御を早期に開始可能とする車両制御装置を提供する。
【解決手段】車輪の偏向時に車輪が路面から受ける反力トルクに基づいて運転者の旋回意思を検出する旋回意思検出器2と、車両の旋回運動を司るアクチュエータ4を制御するブレーキ制御器3とを備え、ブレーキ制御器3は、旋回意思検出器2の出力に基づき、アクチュエータ4の駆動を制御することにより、車輪の偏向時に路面から受ける反力トルクから運転者の旋回意思を検出し、運転者のハンドル操作もしくは車両状態量が発生する以前から制御を開始し、制御を早期のタイミングで実施する。
(もっと読む)
状態推定装置
【課題】状態推定装置において、移動体に加速度が加わっている場合であっても、乗員の状態を推定可能とすること。
【解決手段】状態推定処理では、加速度センサから取得した加速度から加速度変化量を、解析処理にて導出した脈波伝播速度からPTT変化量を導出する(S150)。予め用意された状態対応関係群の中から、乗員によって入力された分類情報に一致する分類情報を有した状態対応関係に、導出された加速度変化量及びPTT変化量を照合する(S160)。このとき、照合された加速度変化量及びPTT変化量に最も類似する情報からなる第1対応関係に対応付けられた血管硬さが、乗員の血管硬さ、ひいては乗員の状態として推定される。
(もっと読む)
車両制御システム
【課題】自車の進路上の障害物を回避する際に、ドライバの保舵状態の違いによって車両挙動制御装置の制御が影響を受けることを抑制して、障害物回避能力を向上させる。
【解決手段】操舵角に基づいて車両の挙動を制御するEPSコントローラ1、VSAコントローラ2、RTCコントローラ3、及び左右駆動力配分コントローラ4と、自車の進路上の障害物を検知するレーダー装置18と、障害物を回避するドライバの操作を判別して各コントローラを制御する障害物回避制御部5とを有し、この障害物回避制御部が、ドライバの保舵状態が変則的か否かを判別して、保舵状態が変則的である場合には、障害物回避制御中に各コントローラの制御値が増大補正されるように制御する構成とする。
(もっと読む)
オンラインリスク学習システム
【課題】偏学習によるオンラインリスク認識の性能低下を防止する。
【解決手段】事前知識を保持するベースユニット3の機能と、ユーザの使用環境に応じた学習の進行によって認識性能が変化する学習ユニット4の機能とを融合ユニット5で融合し、最終的に融合ユニット5でリスク認識を行う。これにより、学習ユニット4で偏学習が生じた場合であっても、製品出荷時の初期の性能を維持するベースユニット3の認識性能をシステムに反映してリスク認識性能の低下を排除することができ、ユーザの使用環境に合わせて特化しつつ基本性能を維持することが可能となる。
(もっと読む)
運転支援装置、及び運転支援方法
【課題】運転者が事態を把握しやすいように、リスクや制御状態を効果的に表示する。
【解決手段】車両走行のリスクを検出したときに車両走行を制御すると共に、車両走行のリスクとその制御状態の少なくとも一方を視覚情報として表示する。また、車両走行に対する運転者の主体度を算出し(ステップS2)、算出した主体度に応じて視覚情報の表示形態を変更する(ステップS3)。例えば、車線逸脱防止制御が作動するときには、走行車線からの逸脱を抑制している状態を、反逸脱方向の矢印で表示し、主体度Dに応じて矢印のサイズ(長さ・太さを含む)や色を変化させる。ここで、主体度Dが低レベルのときには、逸脱傾向が増加するリスクが高まっているので、矢印を例えば『赤色』に設定し、そのサイズを大きくする。
(もっと読む)
61 - 70 / 279
[ Back to top ]