
国際特許分類[B60W40/08]の内容
処理操作;運輸 (1,245,546) | 車両一般 (234,424) | 異なる種類または異なる機能の車両用サブユニットの関連制御;ハイブリッド車両に特に適した制御システム;特定の単一のサブユニットの制御に関するものではない、特定の目的のための道路走行用車両の運動制御システム (34,847) | 特定の単一のサブユニットの制御に関するものではない道路走行用車両の運動制御システムのためのパラメータの推定または演算 (1,216) | 運転者又は同乗者の状態に関するもの (279)
国際特許分類[B60W40/08]に分類される特許
21 - 30 / 279
車両運転者の運転能力判定方法及びシステム
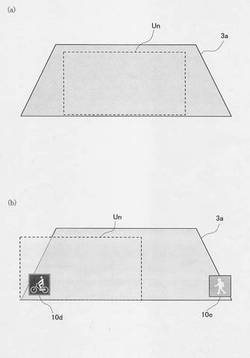
【課題】本発明の課題は、運転者の視覚範囲、視覚能力を認識できるシステムを用い、運転者の運転能力を的確に判断し、その運転者に合った運転支援モードを決定する車両運転者の運転能力判定方法及びシステムを提供することにある。
【解決手段】視覚範囲Unが左側に偏っている場合、例えば、自転車の判定用画像10dは見えているが、右からの歩行者の判定用画像10eは見えていない場合がある。このような場合、右側からの対象物に対して特に注意を促すように運転支援モードが決定されるようにすればよい。こうすることで、運転者は自分の現在の状態に合った適切な支援を受けることが可能となり、ひいては安全運転へと繋がり、交通事故の防止効果が高まる。
(もっと読む)
車線変更制御装置および車線変更ストレス評価方法

【課題】合流地点において車線変更を行う際の運転者の運転負荷を低減することができる車線変更制御装置を提供する。
【解決手段】自車線が合流車線の終端である車線終端点に接近することに対する運転者のストレスを車線終端ストレス度合として評価するとともに、本線車線において自車両の後方を走行する後方車両に対する自車両の運転者のストレスを後方車両ストレス度合として評価することで、合流地点における運転者のストレスを合流ストレス度合として評価し、合流ストレス度合が小さくなるようなタイミングで、自車両の車線変更を行うように、自車両を誘導する。
(もっと読む)
制御効果健康能力判定推論システム及び方法
【課題】コントロールエフェクタの応答能力を判断するためのシステムと方法を提供する。
【解決手段】コントロールエフェクタと関連するコマンドデータおよびセンサ・データは、コントロールエフェクタ健康のコントロールエフェクタ健康データ典型を生成するために処理される。コントロールエフェクタ健康データは、論理(reasoner)で処理される。論理(reasoner)は、一つ以上の誤りを選択的に起訴して、消去して、起訴された誤りが生じる一つ以上の失敗を判断して、1つ以上の判断された失敗に基づいて、コントロールエフェクタが反応することができるコントロールエフェクタ命令の有用な範囲を判断するように構成される。
(もっと読む)
車両制御装置および車両制御方法
【課題】ブレーキペダルの踏み込み操作量を検出するためのセンサを設けることなく、アクセルペダルおよびブレーキペダルの同時踏み込みに起因する車両の加速や発進を抑える。
【解決手段】機関ECU31により算出される内燃機関11の出力トルクと加速度センサ34により検出した車両10の加速度とに基づいてブレーキペダル17の踏み込み操作力を推定する。その推定されるブレーキペダル17の踏み込み操作力が第2判定値以上であり、且つアクセルセンサ33により検出されるアクセルペダル22の踏み込み操作量が第1判定値以上であるときに、内燃機関11の出力トルクを制限する。
(もっと読む)
運転者注視方向連動の前方衝突危険警報システム、その方法及びそれを利用した車両
【課題】ナビゲーションと連動して交差点進入時に運転者が注視する方向の反対方向、即ち、運転者が注視できなかった方向の障害物を感知し、運転者の交差点進入を安全にする運転者注視方向連動の前方衝突危険警報システム、その方法及びそれを利用した車両を提供する。
【解決手段】 本発明は、運転者の注視方向を認識する運転者注視方向認識部と、運転者が注視しない方向の障害物を感知する障害物感知部と、交差点進入時に前記運転者注視方向認識部から運転者の顔面方向データを受信及び分析して前記運転者が注視する方向を把握し、前記障害物感知部へ前記運転者が注視する方向の反対方向に対する障害物の感知を要請し、障害物感知の結果を分析するエンジン制御ユニットとを含むことを特徴とする。
本発明によれば、交差点へ進入時、運転者に障害物の有無に従い警告することにより、運転者の不注意による交通事故を予め防止することができる効果がある。
(もっと読む)
運転評価装置
【課題】GPS受信状況によって車両挙動の推定精度が低下する場合にあっても、適切な方法で運転評価値を算出して表示する。
【解決手段】運転安定度評価装置は、GPS受信信号を取得し(S101)、GPS受信信号に受信時刻を設定し(S102)、車両の速度を算出し(S103)、車両の現在位置と受信時刻と車両の速度に基づいて車両の挙動の推定値を算出し(S104)、受信時刻から求められる車両の現在位置の更新時間に基づいて、挙動推定値の精度を算出する(S105)。そして、この挙動の推定値と挙動推定値の精度に基づいて、走行に関する評価値を算出し(S107)、その評価値を表示する(S108)。
(もっと読む)
車両の操作状態判定システム
【課題】本発明は、車両の操作状態判定システムにおいて、運転者の意図的な運転操作をより正確に判別することを課題とする。
【解決手段】本発明は、上記した課題を解決するために、車輪の転舵角またはステアリングホイールの操舵角が変化したときに、操舵装置に入力されるトルクがピークに到達した後に閾値Tb以上の大きさを維持する時間が基準時間tbase以上であることを条件に、車輪の転舵角の変化が運転者の意図的な操舵に因ると判定するようにした。
(もっと読む)
車両の制御装置
【課題】車両の走行環境や運転者の嗜好・走行意図を車両の挙動の制御特性により的確に反映させて、運転者の満足度およびドライバビリティを向上させることのできる車両の制御装置を提供すること。
【解決手段】加速度が変化することに基づいて走行特性を変化させる車両の制御装置において、前記加速度が変化したことにより前記走行特性を変更する場合に、前記加速度が変化する直前に設定されていた変更前の前記走行特性に基づいて変更する前記走行特性の変更量を調整する走行特性変更手段(ステップS2)を設けた。
(もっと読む)
車両の制御装置
【課題】追従走行制御機能あるいは衝突回避制御機能を備えた自動定速走行制御を、運転者状態(漫然状態等)に応じて変更することによって、衝突回避や警報に至るまでの展開に幅を持たせる。
【解決手段】運転者状態判定システムによって求められた運転者状態判定用特徴値の所定時間TD内の時間割合TD/TR1を判定する第一の閾値(0.5)とは別な第二の閾値R0を設定し、運転者状態判定用特徴値の所定時間TD内の時間割合TD/TR1が第二の閾値R0を超える場合には、自動定速走行制御の追従走行制御における設定車間距離を増大するように変更する。
(もっと読む)
車両の制御装置
【課題】車両の走行環境や運転者の嗜好・走行意図を車両の挙動の制御特性により的確に反映させるとともに、制御の際の制御遅れを防止もしくは抑制して、運転者の満足度およびドライバビリティを向上させることのできる車両の制御装置を提供すること。
【解決手段】車両の走行状態に基づいて指標を求め、その指標に応じて車両の走行特性を変更するように構成された車両の制御装置において、前記走行特性を変更する際に目標とする目標特性を前記指標に基づいて設定し、その目標特性に実際の前記走行特性を追従させるように制御する走行特性制御手段(ステップS1,S2,S6)と、前記目標特性と前記実際の走行特性との乖離が大きい場合に、前記目標特性もしくは前記指標を、前記目標特性が前記実際の走行特性に近づくように補正する目標特性補正手段(ステップS3,S4,S5,S6)とを設けた。
(もっと読む)
21 - 30 / 279
[ Back to top ]