
国際特許分類[B60W40/08]の内容
処理操作;運輸 (1,245,546) | 車両一般 (234,424) | 異なる種類または異なる機能の車両用サブユニットの関連制御;ハイブリッド車両に特に適した制御システム;特定の単一のサブユニットの制御に関するものではない、特定の目的のための道路走行用車両の運動制御システム (34,847) | 特定の単一のサブユニットの制御に関するものではない道路走行用車両の運動制御システムのためのパラメータの推定または演算 (1,216) | 運転者又は同乗者の状態に関するもの (279)
国際特許分類[B60W40/08]に分類される特許
11 - 20 / 279
意識低下判定装置
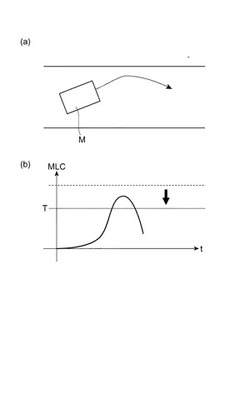
【課題】車両の走行状態を考慮し車両の逸脱危険度を加味して運転者の意識低下判定を行うことにより、運転者の意識低下状態を精度よく判定できる意識低下判定装置を提供すること。
【解決手段】逸脱危険度MLCの値の保持数が設定数aより大きい場合、かつ、車両Mにおいて操舵がやっと行われて、記憶保持された逸脱危険度MLCが減少する傾向にあると判定された場合、すなわち、操舵が行われず走行車線から逸脱してしまうおそれのある状態からハンドル操作の修正が大きく行われた無操舵後修正過大状態の場合、既に規定された閾値(破線で示された閾値)よりも、所定値(または所定割合)だけ低い値を、この閾値Tに変更して決定する。
(もっと読む)
ドライバ状態判定装置

【課題】ドライバの意識低下状態を精度よく判定できるドライバ状態判定装置を提供すること。
【解決手段】車両のドライバが意識低下状態であるか否かを判定するドライバ状態判定装置において、車両が車両の前方に位置する先行車に接近しているか否かを判定し(S14)、車両のドライバが無操作状態であるか否かを判定し(S18)、車両のドライバが過去所定時間内に運転操作をしたか否かを判定し(S20)、車両が先行車と接近していると判定され、ドライバが無操作状態であると判定され、かつ、ドライバが過去所定時間内に運転操作をしていないと判定された場合に、ドライバが意識低下状態であると判定する。ドライバの過去の運転操作の有無を加味することにより、ドライバの意識的な先行車への接近を意識低下状態であると誤検出することが抑制される。
(もっと読む)
運転者状態検出システム及び運転者状態検出方法
【課題】適切な運転者状態判定しきい値を用いて運転者の異常運転を正確に特定する。
【解決手段】車両のヨーレイトを検出し(S1)、検出されたヨーレイトの実測値の増減が反転する反転ポイントを特定し(S3)、特定された2つの反転ポイントを結ぶ線分から決まる所定時間毎のヨーレートを演算し(S4)、演算された所定時間毎のヨーレートとヨーレイトの実測値との偏差を演算し(S5、S6)、偏差を運転者状態判定しきい値と比較して運転者の状態が異常であるか否かを判断し(S22、S8、S9)、車両の挙動及び運転者による運転操作の少なくとも一方に応じて運転者状態判定しきい値を可変設定する(S21)。
(もっと読む)
安全運転支援装置及び安全運転支援方法
【課題】空走時間を短くして、より安全な車両の制御を可能にする安全運転支援装置等を提供する。
【解決手段】車両に搭載される安全運転支援装置は、車両を運転する運転者の脳波信号を計測する脳波計測部と、運転者の視野範囲をセンシングするセンシング部とセンシング部が取得した運転者の視野範囲において、移動する物体を検出する物体検出部と、物体が検出されたタイミングを起点として予め定められる脳波特徴区間における脳波信号の事象関連電位の特徴成分の値と、予め定められた閾値とを比較し、比較した結果に基づいて運転者が危険を認知しているか否かを判別する危険判別部と、判別結果が、運転者が危険を認知していないことを示しているときは、車両を制御するための制御信号を出力する出力部とを備えている。
(もっと読む)
車両異常通知装置
【課題】車両に異常が発生したか否かの判定を精度よく行うことのできる車両異常通知装置を提供する。
【解決手段】運転者が危険を感知したことを示す感情状態である危険感知状態と、走行動作に影響する車両の異常が疑われる車両状態である異常被疑状態とを検出し(S11〜S13)、これらの検出結果に基づいて、走行動作に影響する車両の異常が発生したか否かを判定する(S15)。具体的には、危険感知状態が検出された場合には、危険感知状態が検出されない場合と比較して、異常が発生したと判定されやすい判定基準で判定を行う。このため、車両に異常が発生したか否かの判定を精度よく行うことができる。
(もっと読む)
呼吸統制装置、呼吸統制方法及びプログラム
【課題】ドライバに、覚醒度の低下を抑制するための動作を促すことで、覚醒度の低下を継続的に抑制する。
【解決手段】車両を運転するドライバを監視し、ドライバの眠気の度合いが、所定の基準値よりも高くなった場合に、実際に計測されたドライバの呼吸間隔よりも短い周期での呼吸動作を促す(ステップS304,ステップS307)。ドライバが、この指示に従った呼吸動作を行うことで、当該ドライバの覚醒度の低下が抑制される。
(もっと読む)
状態判定装置、状態判定方法及びプログラム
【課題】簡易な装置で、正確にドライバの状態を判定する。
【解決手段】ドライバの重心の変化に起因する特徴量に基づいて、ドライバの運転状態が属するクラスを判定する。ドライバの重心の変動は、ドライバの覚醒度との相関が高いと考えられる。このため、正確にドライバの状態を判定することができる。また、ドライバの状態の判定に用いる特徴量の算出には、荷重センサ211〜214からの出力を用いる。このため、装置の構造を簡易化することができる。
(もっと読む)
覚醒低下検出装置
【課題】覚醒低下レベルの推定精度を高めることができる覚醒低下検出装置を提供する。
【解決手段】車両情報又は運転手の運転状態を示す情報の少なくともいずれか一方の情報に基づいて、運転手の第1の覚醒度を演算する第1の覚醒度演算手段と、第1の覚醒度検出手段と異なり、覚醒度低下の初期状態における運転手の副次的動作に基づいて、第2の覚醒度を演算する第2の覚醒度演算手段と、第1の覚醒度と前記第2の覚醒度とを用いて、運転手の覚醒低下レベルを推定する覚醒低下レベル推定手段とを備える。
(もっと読む)
運転支援装置
【課題】カーブでの実際の車両の挙動により応じた減速制御が可能となる運転支援装置を提供する。
【解決手段】運転支援装置10aの自動減速制御部16は、車両のカーブに対する進入速度が過大と予測されるときに、カーブを車両が走行中に車両のドライバーが互いに異なる運転操作を行なう操作区間それぞれに応じて、ドライバーの運転操作に介入して車両を減速させる。このため、ドライバーがカーブで行なう運転操作に対応し、カーブでの実際の車両の挙動により応じた減速制御が可能となる。
(もっと読む)
視点位置検出装置、視点位置検出方法及び立体表示装置
【課題】実装コストの低い画像処理から構成され、また、明るさが常に変動する環境下でも安定して対象者の視点位置を検出することが可能な視点位置検出装置、視点位置検出方法及び立体表示装置を提供する。
【解決手段】視点位置検出装置は、1つ以上の発光マーカー12aを備え対象者2の頭部に装着可能であるマーカー部12と、対象者2を撮像する撮像部11と、撮像部11が撮像した対象者2の画像から対象者2の視点位置を検出する視点位置検出部14と、を備える。視点位置検出部14は、撮像部11が撮像した対象者2の画像上の発光マーカー12aの位置を検出し、発光マーカー12aの位置に基づいて対象者2の視点位置を検出する。
(もっと読む)
11 - 20 / 279
[ Back to top ]