
国際特許分類[B60W40/10]の内容
処理操作;運輸 (1,245,546) | 車両一般 (234,424) | 異なる種類または異なる機能の車両用サブユニットの関連制御;ハイブリッド車両に特に適した制御システム;特定の単一のサブユニットの制御に関するものではない、特定の目的のための道路走行用車両の運動制御システム (34,847) | 特定の単一のサブユニットの制御に関するものではない道路走行用車両の運動制御システムのためのパラメータの推定または演算 (1,216) | 車両挙動に関するもの (350)
国際特許分類[B60W40/10]に分類される特許
101 - 110 / 350
バンク角制限装置
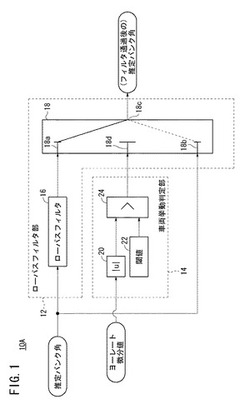
【課題】車両の挙動量が大きく変化する場合、あるいは、カーブが逆バンクである場合に、推定バンク角を制限して、該推定バンク角の値が不安定に陥らないようにする。
【解決手段】バンク角制限装置10Aは、ローパスフィルタ16を備えるローパスフィルタ部12と、車両の挙動量が所定の閾値よりも大きいか否かを判定する車両挙動判定部14とを有し、ローパスフィルタ部12は、前記挙動量が前記閾値よりも大きいと車両挙動判定部14が判定したときに、前記車両に搭載されたバンク角推定装置が推定した路面の推定バンク角をローパスフィルタ16を介して出力し、一方で、前記挙動量が前記閾値以下であると車両挙動判定部14が判定したときに、前記推定バンク角を直接出力する。
(もっと読む)
車両用制御装置、車両用制御装置の制御方法、駆動力配分制御装置及び駆動力配分制御装置の制御方法

【課題】トルク配分装置の過熱を防止しつつ、車輪のスリップを抑制できる車両用制御装置、車両用制御装置の制御方法、駆動力配分制御装置及び駆動力配分制御装置の制御方法を提供する。
【解決手段】車両1に、各車輪12R,12L,13R,13Lに制動力を付与するブレーキ装置と、ブレーキ装置の作動を制御して車両1の走行安定性を向上させるESC制御を実行するESCECU33とを搭載した。4WDECU31は、トルク配分装置6の温度を推定する。そして、4WDECU31は、推定された温度が閾値温度よりも大きい場合には、スリップ閾値を第1の閾値から該第1の閾値よりも小さい第2の閾値に変更させるための閾値用制御信号S1をESCECU33に出力するようにした。
(もっと読む)
車両の横転判定装置及び方法
【課題】従来の車両の故障を診断する装置においては、車両の衝突ないし横転時に、車両の衝突ないし横転に伴って乗員が投げ出されたり飛び出したりすることを防止するための乗員の拘束性を高めることができない。
【解決手段】車両のロール角速度を検出するロール角速度センサ15と、ロール角速度センサ15にて検出したロール角速度の値からロール角を算出するロール角算出部22と、一方の座標軸をロール角、他方の座標軸をロール角速度とする関数のマップと、マップ上に横転限界線を設定し、ロール角算出部22にて算出したロール角及びロール角速度センサ15により検出したロール角速度の値がマップの原点から見て横転限界線を越えるときに車両が横転する可能性があると判定する判定部12とを有する。
(もっと読む)
電気自動車の回生制御装置
【課題】電気自動車の回生制御装置に関し、繰り返し制動時におけるエネルギ回収効率を高めつつ、摩擦制動装置の耐フェード性能を確保する。
【解決手段】制動時における減速度を検出する減速度検出手段1と、制動時における車速を検出する車速検出手段5と、該減速度が予め設定された第一減速度以上であり、かつ、該車速が予め設定された第一車速以上である場合に、計時を開始する計時手段3aと、該減速度及び該計時の経過時間に基づいて、電動機14の回生トルク量を増大させる回生トルク量増大制御を実施する回生量制御手段3bと、を備える。
(もっと読む)
車両のスタビリティファクタ推定装置
【課題】スタビリティファクタを左右独立に精度よく推定する車両のスタビリティファクタ推定装置を提供する。
【解決手段】車両のスタビリティファクタ推定装置は、操舵角検出手段(21)、横加速度検出手段(22)、ヨーレート検出手段(23)および車速検出手段(24)から入力される信号を用いてスタビリティファクタを演算するスタビリティファクタ演算器(33)を備えるスタビリティファクタ推定装置において、定常旋回時にスタビリティファクタ演算器により演算されたスタビリティファクタを左右の旋回方向ごとに記憶するとともに左右独立にスタビリティファクタを学習する左スタビリティファクタ学習器(34)および右スタビリティファクタ学習器(35)を備える。
(もっと読む)
車両用減速制御装置及びその方法
【課題】路面μの推定を必要とせず、路面状態に適合して減速制御する。
【解決手段】車両用減速制御装置は、検出した車輪力(横力Fy)及びスリップ度(スリップ角βt)を基に、車輪のグリップ特性を示すグリップ特性パラメータを得るμ勾配算出部25と、グリップ特性パラメータを基に、補正係数Kを得る補正係数K算出部26と、車両の旋回状態を基に目標車速V*を算出するとともに、該目標車速V*を補正係数Kにより補正する目標車速算出部22と、を備える。
(もっと読む)
タイヤ状態推定装置及びタイヤ状態推定方法
【課題】自動車両の動的挙動の安定化に資するべく、タイヤの状態を正確に推定すること。
【解決手段】タイヤ横力上限推定値、及び車両状態測定値に基づいてタイヤ横滑り角推定値を計算するタイヤ横滑り角推定器と、タイヤセルフアライニングトルク測定値、及び前記タイヤ横滑り角推定器によって計算された前記タイヤ横滑り角推定値に基づいて前記タイヤ横力上限推定値を計算する横力上限推定器と、によってタイヤ状態推定装置を構成する。
(もっと読む)
加減速制御装置
【課題】運転者の加減速意図に沿う制御量で車両を加減速させる加減速制御装置を提供する。
【解決手段】加減速制御装置6は、自車両1の前後加減速度を制御する前後加減速制御部400と、前後加減速制御部400に制御介入して前後加減速度を補正する補正制御部500と、補正制御部500による制御介入を許可または禁止する制御介入許可判断部300を有する。そして、自車両1の横加々速度に基づき自車両1の前後加減速度を補正し、自車両1の前後加減速度の補正を所定条件に基づき許可または禁止する処理を行う。これにより、自車両1の動作を、より運転者の加減速意図に沿ったものとし、前後加減速度の補正制御に起因した運転者の違和感を低減する。
(もっと読む)
センサドリフト量推定装置
【課題】車両運動の状態に関わらず、安定してセンサのドリフト量を推定することができるようにする。
【解決手段】姿勢角オブザーバ24によって、各センサの検出値に応じたセンサ信号に基づいて、車体の鉛直軸に対する姿勢角の微分量を算出する。運動方程式微分量算出手段26によって、センサ信号及び姿勢角オブザーバ24によって推定された姿勢角に基づいて、車両運動の運動方程式より得られる姿勢角の微分量を算出する。ドリフト量推定手段28によって、センサ信号のセンサドリフト量を考慮したときに、姿勢角オブザーバ24により算出された姿勢角の微分量と、運動方程式微分量算出手段26により算出された姿勢角の微分量にセンサドリフト量を考慮した値とが等しくなる関係を用いて、各センサ信号のセンサドリフト量を推定する。ドリフト量補正手段22によって、推定されたセンサドリフト量に基づいて、各センサ信号を補正する。
(もっと読む)
電気自動車の車両制御装置
【課題】各車輪を別個独立した電気モータによって駆動する電気自動四輪車において、実際の走行状況に応じてより適切なヨーモーメントを発生させる。
【解決手段】車両制御装置100は、、ナビゲーション装置200から出力された曲率情報に基づいて理想操舵角δiを算出する操舵角演算部140と、操舵角演算部140によって算出された理想操舵角δi、実操舵角δr、及びナビゲーション装置200から出力された車速、加速度、ヨーレート等に基づいて、各車輪に対して制御すべき制御前後力FXi’(各車輪の駆動力)を演算する駆動力演算部129と、演算された各車輪の制御前後力FXi’(駆動力)に基づいて、インホイールモータ30FL,30FR,30RL,30RRに供給する電流値iを制御する電気モータ制御部131とを備える。
(もっと読む)
101 - 110 / 350
[ Back to top ]