
国際特許分類[B60W40/10]の内容
処理操作;運輸 (1,245,546) | 車両一般 (234,424) | 異なる種類または異なる機能の車両用サブユニットの関連制御;ハイブリッド車両に特に適した制御システム;特定の単一のサブユニットの制御に関するものではない、特定の目的のための道路走行用車両の運動制御システム (34,847) | 特定の単一のサブユニットの制御に関するものではない道路走行用車両の運動制御システムのためのパラメータの推定または演算 (1,216) | 車両挙動に関するもの (350)
国際特許分類[B60W40/10]に分類される特許
61 - 70 / 350
車両制御システム
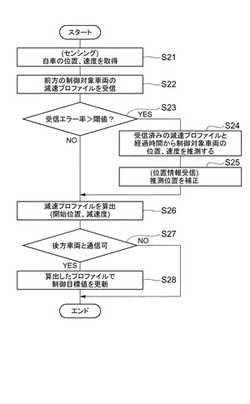
【課題】自車両と他車両との通信性能が低下した場合であっても、自車両と他車両との相対位置関係を制御することが可能な車両制御システムを提供する。
【解決手段】自車両と他車両との間の通信障害の有無を判定し、通信障害が発生していない通常時には自車両の加減速プロファイルを送信し、通信障害が発生している場合には自車両の位置情報のみを送信する構成とする。これにより、通信性能が低下した場合にあっても通信量を減らして通信性能を確保することができる。そのため、受信側の制御車両は、受信した情報に基づいて自車両と他車両との相対位置関係を制御することができる。
(もっと読む)
駆動力制御装置

【課題】車両の旋回性能を向上した駆動力制御装置を提供する。
【解決手段】路面の摩擦係数を推定する摩擦係数推定手段101と、前輪の接地荷重を算出する接地荷重演算手段102と、前輪の横力を算出する横力演算手段103と、摩擦係数推定手段、接地荷重演算手段、横力演算手段の出力に基づいて前輪の許容駆動力を算出する許容駆動力算出手段104と、前輪の駆動力が許容駆動力以下となるように駆動力を制御する駆動力制御手段106とを備える駆動力制御装置100を、前輪の舵角増加に応じて許容駆動力を増加補正する許容駆動力補正手段105を備える構成とする。
(もっと読む)
車両の制御装置
【課題】駆動輪がスキッドしたと判定されるとき、駆動源の出力トルクの変動を低減して車両の挙動を安定させるようにした車両の制御装置を提供する。
【解決手段】車両に搭載されたエンジンの出力を変速してドライブシャフを介して駆動輪に伝達する自動変速機を備えた車両において、車輪速センサの出力に基づいて駆動輪がスキッドしたか否か判定し(S10)、駆動輪がスキッドしたと判定されるとき、ドライブトレーンから出力される駆動源の出力トルクを算出し、それから予想される車両の第1の走行加速度G1を算出すると共に、車輪速センサの出力に基づいて駆動輪の回転速度から予想される車両の第2の走行加速度G2を算出し(S12からS20)、算出された第1、第2の走行加速度G1,G2に基づいて出力トルクの余剰トルクを算出し(S24)、算出された余剰トルクを除去する(S26からS38)。
(もっと読む)
車両用走行エネルギー演算システム
【課題】車両の走行エネルギーを精度良く演算することができる車両用走行エネルギー演算システムを提供する。
【解決手段】 車両用走行エネルギー演算システム1は、車両に搭載されたECU8及び車両DB9と、センターCに設置されたセンターDB12とを備えている。車両DB9には、車両パラメータ、各種センサの検出値、自車両の運転者の速度偏差値及び加速度偏差値等が格納される。センターDB12には、道路パラメータ、任意地点における複数の運転者の速度特性データ及び加速度特性データ等が格納される。ECU8は、自車両の運転者の速度偏差値及び加速度偏差値と複数の運転者の速度特性データ及び加速度特性データとに基づいて、自車両が走行経路上の任意地点を通るときの速度及び加速度を推測し、その推測結果に基づいて自車両の走行パワーを求める走行パワー演算部16を有している。
(もっと読む)
車両の挙動制御装置
【課題】車体スリップ角及びその微分値並びにその2階微分値に基づいて算出されるスピン状態量を制御量として車両のスピン挙動を抑制する挙動制御装置に於いて、急操舵時に制御による運転者のフィーリングの悪化を抑制すること。
【解決手段】本発明の装置は、車両の左右方向のうちの一方の方向に操舵が実行されて車体スリップ角の2階微分値の大きさが所定値を超えた後に所定値を下回るまで制御量に於ける車体スリップ角の2階微分値の寄与が低減されることを特徴とする。
(もっと読む)
車両における低速運転方向の特定
【課題】自動縦列駐車システム、前方/後方非常ブレーキシステム、及び他の車両システムでは、車両が走行している方向を知る必要がある。車輪速度センサ情報には累積誤差が生じ、車両移動方向を特定することができない。
【解決手段】低速で走行する車両の運転方向を特定する方法及びシステム。該方法は、車両が以下の3つの状態:(1)車両が上向き傾斜面に位置する上り坂状態、(2)車両が下向き傾斜面に位置する下り坂状態、及び(3)車両が平坦な面に位置する平坦な面状態のうちの1つにあるか否かを判断することを含む。該方法はまた、複数の車両センサから情報を入手すること、並びに、車両の判断された状態及び複数の車両センサからの情報に基づいて、車両の移動方向を特定することも含む。
(もっと読む)
ブレーキシステムを制御する方法
【課題】制動下で車両の後車軸が持ち上がるのを防止することを目的とした、車両のブレーキシステムを制御する方法を提供する。
【解決手段】より詳細には、本発明は、少なくとも1つの前輪および少なくとも1つの後輪を備える車両のブレーキシステム(19)を制御するための方法であって、後輪が持ち上がる少なくとも1つの状態が存在するかどうかを判定するステップと、そうした状態が存在する場合に、車両のブレーキシステムによって前輪に加えられる制動の作用力を制限および/または低減するステップとを含むことを特徴とする方法に関する。
(もっと読む)
二次衝突低減システム
【課題】衝突検出の確実性を向上させて、誤作動が発生する虞を減少させることが出来る二次衝突低減システムを提供する。
【解決手段】車両1の加速度を検出する第1加速度センサ21,第2加速度センサ23,側突検出加速度センサ24,24と、車両1の進行方向が変更されたことを検出するヨーレートセンサ25と、車両1に制動力を与えるブレーキ装置5…とを有している二次衝突低減システムである。
この二次衝突低減システムには、第1加速度センサ21等及びヨーレートセンサ25からの検出信号に応じて、ブレーキ装置5…を作動させる制御装置10が設けられている。
制御装置10では、第1加速度センサ21等によって検出された加速度が、予め設定された加速度の閾値を越え、且つ、ヨーレートセンサ25によって、車両1の進行方向の変更が検出されたときに、ブレーキ装置5…を作動させる。
(もっと読む)
車両挙動制御装置
【課題】ステアリングの操舵力に関する情報に基づいてドライバの旋回意思を判定しその結果に応じて車両挙動を制御する車両挙動制御装置において、路面反力トルクの信頼性を考慮し適正な挙動制御が行われるようにする。
【解決手段】車輪偏向時に操舵輪が路面から受ける反力トルクである路面反力トルクを検出する路面反力トルク検出手段11、車両の左右車輪速を検出する左右車輪速検出手段、左右車輪速検出手段の出力である左右車輪速から左右車輪速差を演算する左右車輪速差演算手段15、路面反力トルクに基づいて車両の第一の旋回度を演算する第一旋回度演算手段16、左右車輪速差に基いて車両の第二の旋回度を演算する第二旋回度演算手段17、及び第一の旋回度及び第二の旋回度に基づいて路面反力トルクの信頼性を判定する路面反力トルク信頼性判定手段18を備え、路面反力トルク信頼性判定手段の判定結果に基づいて車両の挙動制御が適正化制御される。
(もっと読む)
電気自動車の車両制御装置
【課題】各車輪を別個独立した電気モータによって駆動する電気自動車において、タイヤ毎のノンユニフォーミティの影響を低減し、操縦安定性の低下を防止する。
【解決手段】電気自動四輪車10の車両制御装置100は、ヨーモーメント演算部140と、スリップ率演算部150と、スリップ率制御部160とを備え、ヨーモーメント演算部140において算出されたヨーモーメントが零になるスリップ率を算出する。トルク演算部170は、直進判定・加速度演算部120において直進状態であることが検出されたとき、スリップ率制御部160によって算出された「ヨーモーメントが零になるスリップ率」になるように、インホイールモータ30FL,30FR,30RL,30RRの出力トルクを最適化する。
(もっと読む)
61 - 70 / 350
[ Back to top ]