
国際特許分類[B60W40/10]の内容
処理操作;運輸 (1,245,546) | 車両一般 (234,424) | 異なる種類または異なる機能の車両用サブユニットの関連制御;ハイブリッド車両に特に適した制御システム;特定の単一のサブユニットの制御に関するものではない、特定の目的のための道路走行用車両の運動制御システム (34,847) | 特定の単一のサブユニットの制御に関するものではない道路走行用車両の運動制御システムのためのパラメータの推定または演算 (1,216) | 車両挙動に関するもの (350)
国際特許分類[B60W40/10]に分類される特許
71 - 80 / 350
電気自動車の車両制御装置

【課題】各車輪を別個独立した電気モータによって駆動する電気自動車の直進走行時に、縦揺れ(ピッチング)、上下跳ね(バウンシング)、旋回方向の車体揺れなどの外乱が与えられても操縦安定性の低下を防止する。
【解決手段】電気自動四輪車10の車両制御装置100は、電気自動車の重心を中心とする左右軸回りの上下方向の振動を検出するピッチング検出部130と、旋回方向の回転角が変化する速度を検出するヨーレートセンサ150と、ピッチングモーメントを算出するピッチングモーメント演算部140と、ヨーレートからヨーモーメントを算出するヨーモーメント演算部160とを備え、トルク演算部170は、ピッチングモーメントとヨーモーメントを共に零にするように、インホイールモータの出力トルクを最適化する。
(もっと読む)
車両制御装置

【課題】車両総重量や車両重心位置の変化に対応させた適切な車両挙動制御を行うこと。
【解決手段】設定した目標制御量又は/及び目標制御タイミングで車両10の挙動制御を行う車両制御装置において、車両総重量を推定又は検出する重量演算手段1eと、車両重心位置を推定又は検出する重心位置演算手段1dと、車両10の旋回特性を表す旋回特性指数値を車両総重量と車両重心位置に応じて設定する旋回特性指数設定手段1cと、車両の走行状態を表す走行状態量と車両総重量及び車両重心位置に応じた旋回特性指数値とに基づいて車両10が所望の旋回姿勢となる目標制御量又は/及び目標制御タイミングを設定する旋回制御手段1bと、を設けること。
(もっと読む)
車両制御装置
【課題】走行制御の追従性の向上を図ることのできる車両制御装置を提供すること。
【解決手段】車両1の走行制御を行う運転支援制御を運転支援制御部69で実行する際に、道路状態取得部70で取得した道路の状態より目標軌跡演算部72で仮の目標軌跡を生成し、仮の目標軌跡より、走行抵抗であるコーナリングドラッグを走行抵抗推定部71で推定する。さらに、このコーナリングドラッグを利用して、目標軌跡演算部72で将来の目標軌跡を生成する。このため、生成する目標軌跡と実際の車両1の走行時の走行軌跡とのずれを低減することができ、車両1の走行制御を、車両1の実際の走行に沿った制御に近づけることができる。これにより、運転支援制御時における車両1の挙動のフィードバック量を低減させることができる。この結果、運転支援制御により車両1の走行制御を行う際の制御の追従性の向上を図ることができる。
(もっと読む)
車両制御装置および車両制御方法
【課題】評価関数の収束判定のための条件を適切に設定して、演算時間と車両安定性を両立することができる車両制御装置および車両制御方法を提供することを課題とする。
【解決手段】本発明は、記憶部と制御部を少なくとも備えた車両制御装置において、車両が走行する走行路面に関する走行路面情報を記憶し、記憶した走行路面情報に応じて、評価関数の収束判定基準を可変に設定し、設定した収束判定基準に基づいて、評価関数を用いて車両の将来の走行軌跡を演算する。
(もっと読む)
車両の駆動力制御装置
【課題】車両が低車速かつ大舵角旋回をおこなう場合に最大ヨーモーメントを発生させる駆動制御装置を提供すること。
【解決手段】車速が所定車速以下かつ操舵角が所定角以上で車両Veが旋回をおこなう場合に、キングピンオフセットを考慮して車両重心点P2の周りに発生させるヨーモーメントを算出し、その算出されたヨーモーメントが最大になるように車両Veの転舵角δL,δRが制御されるように構成されている。したがって、キングピンオフセットを考慮することにより、車両Veの旋回に適したヨーモーメントを算出することができるとともに、旋回動作中に車両Veに駆動力変化が生じず、車両Veの車両操作性を向上させることができる。
(もっと読む)
車両用電子安定プログラムのための、レーザダイオードをベースにした自己混合センサ
本発明は、簡単にした車両安定制御のための、レーザダイオードをベースにした自己混合レーザセンサに関する。自己混合レーザセンサから、車両のサイドスリップ角、前輪及び後輪スリップ角、ヨーレート並びに横方向加速度が、はっきりと導き出される。ヨーレート、旋回半径及びタイヤスリップ角の分析に基づく3つの基準が、アンダーステア又はオーバーステアの発生を検出するのに用いられ、これは、簡単にした車両用電子安定プログラムを可能にする。 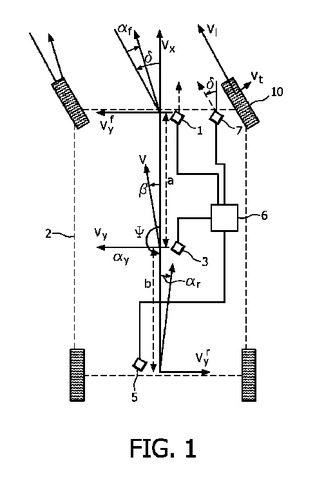 (もっと読む)
(もっと読む)
車両横滑り運動状態量推定装置
【課題】摩擦係数や車両の運動状態が変化する過渡期を含めて車両の横滑り運動の状態量の推定精度を高めることができる車両横滑り運動状態量推定装置を提供する。
【解決手段】車輪2−iと路面との間の摩擦特性モデルを含む車両モデルを用い、各車輪2−iの路面反力モデル値Fsubx_i_estm,Fsuby_i_estmを求めると共に横滑り運動状態量モデル値Vgy_predictを求める手段と、路面反力モデル値の合力によって車両の所定の位置(重心点の位置)に発生する横加速度モデル値Accy_estmと実横加速度検出手段15,22fの出力が示す横加速度検出値Accy_sensとの偏差Accy_errを求める手段と、偏差Accy_errをハイカット特性のフィルタ24d1に通した値を横滑り運動状態量モデル値に加えてなる値を横滑り運動状態量の推定値Vgy_estmとして決定する手段とを備える。
(もっと読む)
路面摩擦係数推定装置
【課題】車両が走行している路面の摩擦係数の推定値が実際の摩擦係数から乖離する方向に更新してしまうような状況が発生するのを防止し、該摩擦係数の推定を精度よく安定に行う。
【解決手段】比較対象外力の第1推定値Mnsp_estmを求める手段(S118−2)と、第2推定値Mnsp_sensを求める手段(S118−1)と、第1推定値Mnsp_estm及び第2推定値Mnsp_sensを基に摩擦係数推定値の増減操作量Δμ_kをそれぞれ決定する複数の増減操作量決定手段とを有し、Δμ_kに応じて摩擦係数推定値を更新する。増減操作量決定手段は第1推定値と第2推定値とのフィルタリング値の偏差に応じてΔμ_1,Δμ_2を決定し、増減操作量決定手段は第1推定値と第2推定値との偏差に応じてΔμ_1を決定する。
(もっと読む)
車両横滑り運動状態量推定装置
【課題】摩擦係数や車両の運動状態、あるいは路面のバンク角が変化する過渡期を含めて車両の横滑り運動の状態量の推定精度を高めることができる車両横滑り運動状態量推定装置を提供する。
【解決手段】車輪2−iと路面との間の摩擦特性モデルを含む車両モデルを用い、各車輪2−iの路面反力モデル値を求めると共に横滑り運動状態量モデル値を求める手段と、路面反力モデル値の合力によって車両に発生する横加速度モデル値と横加速度検出手段15,22fの出力が示す横加速度検出値との偏差Accy_errを求める手段と、上記合力によって車両に発生するヨー軸周りの角加速度モデル値と角加速度検出手段13,22cの出力が示す角加速度検出値との偏差γdot_errを求める手段と、偏差Accy_err及びγdot_errに応じて横滑り運動状態量モデル値を補正してなる値を横滑り運動状態量の推定値Vgy_estmとして決定する手段とを備える。
(もっと読む)
路面摩擦係数推定装置
【課題】車両の所定のヨー軸周りのモーメントの推定値を用いて路面の摩擦係数の推定を行う場合に、路面の摩擦係数の推定値の信頼性や安定性をさらに向上させる。
【解決手段】車両1のヨー軸周りの外力モーメントの第1推定値Mz_estm_kを求める手段(S102〜S116,S118−4)と、第2推定値Mz_sens_kを求める手段(S118−3)と、偏差(Mz_sens_k−Mz_estm_k)を“0”に収束させるように路面摩擦係数の推定値の増減操作量Δμ_kを決定する手段(S118−6)とから成る基本処理手段31_kを複数備え、Δμ_kに応じて路面摩擦係数の推定値を更新する。基本処理手段31_kのそれぞれに対応するヨー軸は互いに異なる位置に設定される。
(もっと読む)
71 - 80 / 350
[ Back to top ]