
国際特許分類[B60W40/10]の内容
処理操作;運輸 (1,245,546) | 車両一般 (234,424) | 異なる種類または異なる機能の車両用サブユニットの関連制御;ハイブリッド車両に特に適した制御システム;特定の単一のサブユニットの制御に関するものではない、特定の目的のための道路走行用車両の運動制御システム (34,847) | 特定の単一のサブユニットの制御に関するものではない道路走行用車両の運動制御システムのためのパラメータの推定または演算 (1,216) | 車両挙動に関するもの (350)
国際特許分類[B60W40/10]に分類される特許
81 - 90 / 350
車両挙動制御装置
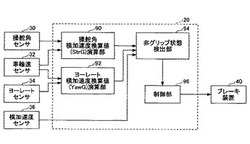
【課題】非グリップ状態検出条件を最適に設定することで、適切な横滑り状態抑制制御を実現すること。
【解決手段】車両の好ましくない横滑り状態を抑制すべく横滑り状態抑制制御を行う車両挙動制御装置10において、車両状態量を換算して横加速度換算値を演算する横加速度換算値演算手段90,92と、実横加速度を検出する実横加速度検出手段36と、路面に対する車両の非グリップ状態を検出し、非グリップ状態が検出された場合に前記横滑り状態抑制制御の実行禁止状態から実行許可状態への切り替えを行う非グリップ状態検出手段94とを備え、前記非グリップ状態は、前記各手段から得られる横加速度換算値及び実横加速度が同一の車両旋回方向を表す正負の符号であり、且つ、横加速度換算値及び実横加速度の大きさがそれぞれの閾値より大きい場合を一条件として検出されることを特徴とする。
(もっと読む)
車両用制御装置

【課題】この発明は、ヨーレートセンサの値を学習補正する場合において、精度の高い学習補正を常に実施でき、学習補正の精度を高めることで、精度の高い自車線の推定が可能な車両用制御装置を提供することを目的とする。
【解決手段】この発明は、ヨーレートセンサの値を、車両の走行安定性を保つための制御に利用する第1の制御装置と、前記ヨーレートセンサの値を、車両の制御に利用する第2の制御装置とを備えた車両用制御装置において、前記ヨーレートセンサが計測した値を、学習補正した値に補正する学習手段を備え、前記学習手段により学習補正した値を用いて、前記二つの制御装置はそれぞれの制御を行い、前記学習手段は、車両の状態に応じて、前記第1の制御装置、あるいは第2の制御装置のどちらか一方を用いて学習補正を実施することを特徴とする。
(もっと読む)
車両の制振制御装置
【課題】 車両の制振制御等に於いて、参照される車輪トルクを推定する際にその推定が良好に実行できない事情を考慮して制御を実行すること。
【解決手段】 本発明の車両の駆動力を制御することにより車両のピッチ又はバウンス振動を抑制する制振制御装置は、車輪と路面との接地個所に於いて発生する車輪に作用する車輪トルク推定値を取得する車輪トルク推定値取得部と、車輪トルク推定値に基づいてピッチ又はバウンス振動振幅を抑制するよう車両の駆動力を制御する駆動力制御部とを含み、更に、車輪のスリップ状態を示す車輪スリップ状態量の表すスリップの程度が所定の程度より大きいとき又は車両が後退しているときには車輪トルク推定値に基づく駆動力の制御を中止することを特徴とする。
(もっと読む)
車両用走行制御装置
【課題】二輪駆動の車両でも駆動輪のスリップによる誤差を補正値に反映しないようにして、車両の横加速度の推定精度を高めることにある。
【解決手段】車両1の左右の従動輪6,7の車輪速のうち一方の車輪速で他方の車輪速を除した値を補正係数として算出し、前記一方の車輪速に前記補正係数を乗じた値を一方の車輪速補正値として出力し、前記一方の車輪速補正値と前記他方の車輪速とに基づき横加速度を推定するようにした車両用走行制御装置3である。
(もっと読む)
車両状態推定装置
【課題】車両の後輪のコーナリングパワーの推定精度を向上させることを課題とする。
【解決手段】前輪のみを操舵する車両の後輪のコーナリングパワーを求める車両状態推定装置において、車両のヨーレイトを検出するヨーレイト検出器1と、車両の横Gを検出する横G検出器2と、ヨーレイト検出器1で検出されたヨーレイトと、横G検出器2で検出された横Gとに基づいて、横Gからヨーレイトまでの周波数伝達特性G(z)を算出する周波数伝達特性算出器3と、周波数伝達特性算出器3で算出された周波数伝達特性に基づいて、車両の後輪のコーナリングパワーを算出するコーナリングパワー算出器4とを有することを特徴とする。
(もっと読む)
自動車の運転操縦の自動認識方法及びこの方法を含む運転者援助システム
本発明は、自動車の運転操縦特に追越し操縦又は回避操縦の自動認識方法に関し、車両周辺が検出され、これから電子写像が形成され、電子写像が車線及び/又は車道及び車両周辺にある物体(B,C)の認識のために使用され、自動車(A)の縦運動及び横運動情
が、車線認識及び/又は車道認識のデータ(bLane,yLane,θ,co)及び/又は自
から次の指標量、即ち車線標識又は車道標識(L)に対する自動車(A)の横間隔値(LOL,LOR)、走行方向にある物体(B)特に先行車両(B)に対する間隔(d)に関する衝突までの時間値(TTCA,B)、衝突までの時間値の指標量(TTCA,B)及び自動車の加速ペダルの位置(FPS)に相当する値から形成される縦運動追越し指標又は回避指標(I)が形成され、b)これらの指標量(LOL,LOR,TTCA,B,I)のために閾値(Ith,TTCA,B,th)が求められて、追越し過程又は回避過程、特に追従走行、車線変更、静止又は動いている物体(B)のそばの通過走行、追越される物体(B)の車線への入り込みの部分操縦を認識するため、及びこれらの部分操縦の間の移行を認識するための基準として使用される。 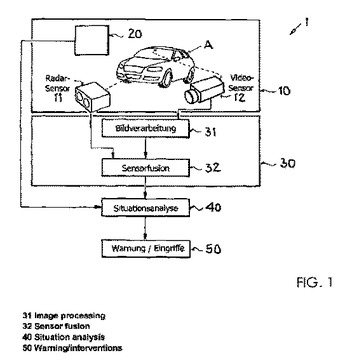 (もっと読む)
(もっと読む)
自動車およびその制御方法
【課題】バネ上構造物の振動をより適正に抑制する。
【解決手段】最大出力要請トルクTmmaxがモータMG2の定格トルクの正トルクTlimmaxからマージンαを減じた値以下であると共に最小出力要請トルクTmminがモータMG2の定格トルクの負トルクTlimminからマージンαを加えた値以上であるときには、出力要請トルクTmをトルク制限Tmin,Tmaxで制限した値としてモータトルク指令Tm2*を設定し(S200)、最大出力要請トルクTmmaxが正トルクTlimmaxからマージンαを減じた値より大きいときや、最小出力要請トルクTmminが負トルクTlimminからマージンαを加えた値未満であるときには、非バネ上制振実行トルクTmvをトルク制限Tmin,Tmaxで制限した値としてモータトルク指令Tm2*を設定する(S210)。
(もっと読む)
挙動制御装置
【課題】車輪の横滑りを抑制可能な挙動制御装置を提供する。
【解決手段】目標ヨーレートに基づき車両の挙動を制御する挙動制御装置において、車輪の許容横力を推定する手段(ステップS3)と、車輪の実横力を求める手段(ステップS4)と、許容横力または実横力のうち小さい方を選択する手段(ステップS5)と、選択された横力からヨーモーメントを求める手段(ステップS6)と、選択された横力から横加速度を求める手段(ステップS7)と、ヨーモーメントおよび横加速度から第1目標ヨーレートを求める手段(ステップS8)と、転舵角から第2目標ヨーレートを求める手段(ステップS9)と、第2目標ヨーレートが第1目標ヨーレート以下のときは第2目標ヨーレートを選択し、第2目標ヨーレートが第1目標ヨーレートを超えたときは第1目標ヨーレートを選択する手段(ステップS10,S11,S12)とを備えている。
(もっと読む)
路面摩擦係数推定装置
【課題】車両が走行している路面の摩擦係数の推定値が不安定な変動を生じたり、該推定値の精度が低下するのを防止しつつ、該摩擦係数の推定を行う。
【解決手段】路面反力の合力によって車両1に作用する比較対象外力の第1推定値Mnsp_estmを求める手段(S102〜S116,S122−2)と、比較対象外力に対応する慣性力を規定する車両1の運動状態量γdot,Accyの観測値から比較対象外力の第2推定値Mnsp_sensを求める手段(S122−1)と、摩擦係数μの変化に対する比較対象外力の感度pを算出するμ感度算出手段(S122−4)を備え、偏差(Mnsp_sens−Mnsp_estm)とμ感度pとに応じて路面摩擦係数の推定値μ_estmを更新する。
(もっと読む)
挙動制御装置
【課題】車両が旋回走行するとき、車両の挙動に運転者が違和感を持つことを回避できる、挙動制御装置を提供する。
【解決手段】車両が旋回走行する際の目標横加速度を求め、目標横加速度に基づいて目標ヨーレートを求め、車両が旋回走行する際の実ヨーレートを目標ヨーレートに近づけるように車両の挙動を制御する、挙動制御装置において、車両が旋回走行する際の半径に基づいて、将来の横加速度を推定する第1推定手段(ステップS)と、車両における現在の横加速度に基づいて、将来の横加速度を推定する第2推定手段(ステップS2)、と、車両における現在のステアリングホイールの操舵角に基づいて、将来の横加速度を推定する第3推定手段(ステップS3)と、第1推定手段(ステップS1)または第2推定手段(ステップS2)または第3推定手段(ステップS3)により推定された横加速度のうち、最小値を目標横加速度として選択する選択手段(ステップS7)とを備えている。
(もっと読む)
81 - 90 / 350
[ Back to top ]