
国際特許分類[B60W40/10]の内容
処理操作;運輸 (1,245,546) | 車両一般 (234,424) | 異なる種類または異なる機能の車両用サブユニットの関連制御;ハイブリッド車両に特に適した制御システム;特定の単一のサブユニットの制御に関するものではない、特定の目的のための道路走行用車両の運動制御システム (34,847) | 特定の単一のサブユニットの制御に関するものではない道路走行用車両の運動制御システムのためのパラメータの推定または演算 (1,216) | 車両挙動に関するもの (350)
国際特許分類[B60W40/10]に分類される特許
51 - 60 / 350
車両運動制御装置
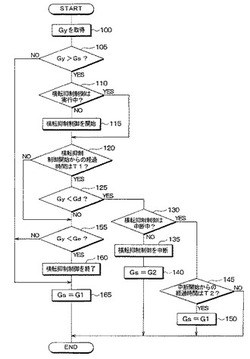
【課題】横転抑制制御を行う必要がないときにまで横転抑制制御が行われてしまうことを防止する。
【解決手段】横転抑制制御の開始条件(Gy>Gs)が満たされることによって一旦横転抑制制御が開始されたとしても、横転抑制制御開始から待ち時間T1が経過した時点で横転抑制制御を継続するべきか中断すべきかを判定する。そして、横転抑制制御を中断すべきと判定されたときに、横転抑制制御の開始条件を満たしていてもそれを継続しないようにする。これにより、本来横転に至らない状況まで横転抑制制御が継続されてしまうことを抑制することができる。
(もっと読む)
車両の運動制御装置

【課題】違和感が少なく、安全性能向上を可能とする車両の運転制御装置を提供する。
【解決手段】四輪の駆動力と制動力を独立に制御可能な車両の運動制御装置において、車両の横運動に連係した前後加減速制御指令に基づいて、四輪のうちの左右輪に略同一の駆動力及び制動力を発生する第1のモード(G−Vectoring制御)と、車両の横滑り情報から算出した目標ヨーモーメントに基づいて、四輪のうちの左右輪に異なる駆動力及び制動力を発生する第2のモード(横滑り防止制御)と、を有し、目標ヨーモーメントが予め定めた閾値以下のときは第1のモードが選択され、目標ヨーモーメントが閾値よりも大きいときは第2のモードが選択される。
(もっと読む)
車両挙動制御装置
【課題】より早くから車両状態が不安定領域に至る可能性があることを見出し、制御開始することで、より車両の安定性を高くすることを可能とする。
【解決手段】車両が横滑りに至った不安定領域R2となるより前の状態である横滑り前状態を検出し、横滑り前状態が検出されたときに旋回外側後輪に対して制動力を発生させる。この旋回外側後輪に発生させた制動力によって、旋回外輪に対して掛かる荷重が増加させられ、車両の横力が増加させられる。このため、車両の横滑りを発生させ難くすることが可能となり、いわゆるスロースピンのような緩やかな車両挙動低下を事前に抑制することができる。よって、より早くから車両状態が不安定領域に至る可能性があることを見出し、制御開始することで、より車両の安定性を高くすることが可能となる。
(もっと読む)
電気自動車の車輪スリップ制御装置
【課題】電気自動車の減速走行時における駆動輪のロック傾向及びロック回復傾向を的確に判定して、駆動輪のロックを防止するようにした車輪スリップ制御装置を提供する。
【解決手段】車両ECU(24)は、駆動輪(16,18)の車輪回転速度(Vw)の変化率である車輪速度変化率(ΔVw)と、駆動輪(16,18)のスリップ率(Sw)とに基づき、駆動輪が(16,18)ロックする傾向にあると判定すると、電動機(6)をモータ作動させて電動機の(6)駆動トルクを駆動輪(16,18)に付与する一方、車輪速度変化率(ΔVw)とスリップ率(Sw)とに基づき、駆動輪(16,18)のロック傾向が解消しつつあると判定すると、電動機(6)を発電機作動させて電動機(6)の回生制動トルクを駆動輪(16,18)に付与する。
(もっと読む)
電気自動車の車輪スリップ制御装置
【課題】電気自動車の駆動輪がロックする傾向にあるときに、電気自動車の運転状態に応じて駆動輪のスリップを適正に制御するようにした車輪スリップ制御装置を提供する。
【解決手段】車両ECU(24)は、駆動輪(16,18)がロックする傾向にあるときに、電動機(6)をモータ作動または発電機作動に切り換えて制御することにより、駆動輪(16,18)の路面に対するスリップ率を目標スリップ率に近付ける。このとき、ハイブリッド電気自動車(1)が直進運転状態にある場合には、車両ECU(24)が第1スリップ率を上記目標スリップ率とする。一方、ハイブリッド電気自動車(1)が旋回運転状態にある場合には、車両ECU(24)が上記第1スリップ率よりスリップ率の増大側に設定された第2スリップ率を上記目標スリップ率とする。
(もっと読む)
路面摩擦係数推定装置
【課題】いかなる車両の運動状態においても、重み付け等の複雑な処理を加えることなく、路面摩擦係数を連続的に自然な値で精度良く推定する。
【解決手段】実際に生じている推定ラック推力Fr_star、推定車輪制駆動力Fx_star、推定横力Fy_starを算出し、タイヤの縦ひずみと横ひずみを表現するパラメータλと路面摩擦係数μとをパラメータとして含むタイヤのブラッシュモデルにより基準ラック推力Fr_model、基準車輪制駆動力Fx_model、基準横力Fy_modelを算出し、推定ラック推力Fr_starと基準ラック推力Fr_modelとの偏差と推定車輪制駆動力Fx_starと基準車輪制駆動力Fx_modelとの偏差と推定横力Fy_starと基準横力Fy_modelとの偏差が最小となるように路面摩擦係数μの値を最適化計算により求める。
(もっと読む)
車両前後進判定装置及び車両制御装置
【課題】 簡単かつ安価な構成でありながら、車両の進行方向を取得して、運転者の意思に沿った円滑な走行の実現しつつ、車両側への負担を軽減できるきめ細かな制御を可能にする車両前後進判定装置及び車両制御装置を提供することを目的とする。
【解決手段】 本発明に係る車両前後進判定装置は、停止中の車両が動き出した方向を情報として取得する車両前後進情報取得手段(ECU4、Gセンサ12等)と、車両の運転者の意思を操作情報に基づいて取得する運転者意思取得手段(シフト/セレクトストロークセンサ9等)と、前記車両前後進情報取得手段により取得された停止中の車両が動き出した方向と、前記運転者意思取得手段により取得された運転者の意思と、に基づいて、停止中の車両が動き出した方向が車両の運転者の意思に沿った方向か否かを含めて前後進判定する判定手段(ECU4)と、を含んで構成される。
(もっと読む)
車両姿勢検出装置、および車両姿勢検出方法
【課題】車両の姿勢をより適切に検出可能とすること。
【解決手段】一の磁束密度センサが検出した磁束密度と他の磁束密度センサが検出した磁束密度との差に基づいて、車両の姿勢を検出するようにした。この構成によれば、例えば、車両が一の車輪側に傾いた場合、一の車輪の接地荷重と他の車輪の接地荷重とが反対方向に変動する。そのため、一の車輪の接地荷重と他の車輪の接地荷重との差は、一の車輪の接地荷重の低減量の絶対値および他の車輪の接地荷重の増大量の絶対値の合計値分変化する。それゆえ、これらの差に着目した場合、当該差が大きく変化することで、車両が当該一の車輪側に傾いた姿勢をとっていることを比較的容易に検出できる。
(もっと読む)
車両のスリップ判定装置
【課題】車両のスリップ判定装置に於いて、より精度よく車体速を推定し、正確にスリップ判定を行うこと。
【解決手段】本発明のスリップ判定装置は、第一の車輪速センサにより得られた第一の車輪速値と、車体前後加速度値に基づいて決定された車体速推定値とに基づいて車両の車輪のスリップ状態を判定するスリップ判定部とを有し、車体前後加速度値として、車輪がスリップ状態にないときには、第二の車輪速センサにより得られた第二の車輪速値の微分値の低周波数成分と前後加速度センサにより得られた加速度値の高周波数成分を加算して得られる値が用いられ、車輪がスリップ状態にあるときには、前後加速度センサにより得られた加速度値の高周波数成分が用いられることを特徴とする。
(もっと読む)
車両の速度制御装置
【課題】車両前方にあるカーブを通過する際に運転者に与える違和感が小さい減速制御が達成できる車両の速度制御装置を提供すること。
【解決手段】車両の前方における車両が走行している道路上の複数の位置データ(ノード点)Nd[n]が取得され、各ノード点Nd[n]における道路の屈曲度Rc[n]が演算される。この屈曲度Rc[n]に基づいて、カーブ内屈曲度一定区間Cr#が識別され、Cr#についてのカーブ内一定屈曲度Rm#、及びカーブ端点位置Px#が決定される。車両の実車速Vxa、カーブ内一定屈曲度Rm#から演算される適正車速、及び、カーブ端点位置Px#に基づいて、運転者による加減速操作がなされない場合においても、車両がカーブを適正に通過するためにカーブ減速制御が実行される。即ち、カーブ内において最も屈曲度が大きい区間の開始地点、及びその区間の一定屈曲度に基づいてカーブ減速制御がなされる。
(もっと読む)
51 - 60 / 350
[ Back to top ]