
国際特許分類[B60W40/10]の内容
処理操作;運輸 (1,245,546) | 車両一般 (234,424) | 異なる種類または異なる機能の車両用サブユニットの関連制御;ハイブリッド車両に特に適した制御システム;特定の単一のサブユニットの制御に関するものではない、特定の目的のための道路走行用車両の運動制御システム (34,847) | 特定の単一のサブユニットの制御に関するものではない道路走行用車両の運動制御システムのためのパラメータの推定または演算 (1,216) | 車両挙動に関するもの (350)
国際特許分類[B60W40/10]に分類される特許
11 - 20 / 350
車両の挙動データ記憶制御システム、電子制御装置、データ記憶装置
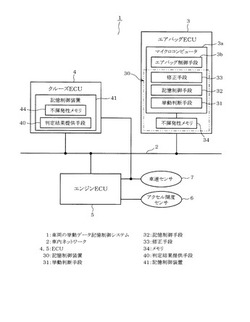
【課題】「予期せぬ挙動」に対応した挙動データのみの利用が可能なように記憶させることができるようにする。
【解決手段】記憶制御装置30は、取得した挙動データが「予期せぬ挙動」を示すものであるか否かを判断し、「予期せぬ挙動」であると判断したときにはその時点で不揮発性メモリ34に当該「予期せぬ挙動」を示す挙動データを記憶する。クルーズECU4は自身の制御に起因する挙動変化が有ったと判定したときには、当該判定結果をCAN2に送信し、さらに前記記憶制御装置30は、記憶した挙動データの内容とクルーズECU4から送信された判定結果の内容とが一致するか否かを判断し、一致すれば不揮発性メモリ34で記憶した前記挙動データを削除又は上書き許可する。
(もっと読む)
車両運動制御システム

【課題】車両安定性の低下を簡易に予測できる車両運動制御システムを提供すること。
【解決手段】この車両運動制御システム1は、車輪速度、車体速度、前後加速度および横加速度、実ヨーレート、操舵角、アクセル開度、ブレーキ踏力など車両状態量に基づいて、耐ロールオーバー制御、US/OS抑制制御などの車両運動制御を行う制御装置5を備えている。また、制御装置5は、現在の車両状態量と、車両状態量の履歴および車両運動制御の実施履歴を含む過去の制御履歴とに基づいて、将来的な車両安定性の低下を予測する安定性低下予測部53を有している。
(もっと読む)
車両制御装置
【課題】 横転傾向の判定精度を向上することができる車両制御装置を提供すること。
【解決手段】 車両に作用する複数方向の加速度(Xg,Yg)を合成した合成加速度Gを算出する合成加速度算出部と、複数方向の加速度の変化量dXg/dt ,dYg/dtを合成した合成加加速度dG/dtを算出する合成加加速度算出部と、算出された合成加加速度dG/dtを用いて車両の横転傾向を判定する横転傾向判定部と、を備えたコントロールユニット1を有する。
(もっと読む)
車両用情報処理装置および車両制御装置
【課題】車輪の滑りによる車両の挙動を精度よく判定することができる車両用情報処理装置および車両制御装置を提供すること。
【解決手段】車両100のヨーレートを検出するヨーレート検出部38によって検出されたヨーレートの向きに基づいて、車両の車輪の滑りによる車両の挙動を判定する車両用情報処理装置1、および車両用情報処理装置を備える車両制御装置1−1。車両用情報処理装置は、例えば、ヨーレートの向きが所定時間変化しない場合に上記挙動が生じていると判定する。
(もっと読む)
車両運動制御装置
【課題】車両の走行状態に適した運動制御を、より容易に行うことのできる車両運動制御装置を提供すること。
【解決手段】車両運動制御装置2に、車両1のタイヤ温度を取得するタイヤ温度取得部50と、車両1の運動を制御する運動制御部54と、を備え、運動制御部54は、車両1の走行状態に応じて、タイヤ温度取得部50で取得したタイヤ温度に基づく運動制御と、予め定められた所定値に基づく運動制御とを切替える。これにより、タイヤ温度に基づいて運動制御を行う場合には、走行時に変化するタイヤ温度に基づいて制御することにより適切な制御を行うことができ、所定値に基づいて運動制御を行う場合には、演算時間の短縮を図ったり、ECU40の負荷を低減したりすることができる。この結果、車両1の走行状態に適した運動制御を、より容易に行うことができる。
(もっと読む)
タイヤ接地状態推定装置
【課題】計測タイヤ力に含まれる誤差を抑制し、タイヤ接地状態を高精度に推定することができるタイヤ接地状態推定装置を提供すること。
【解決手段】本発明のタイヤ接地状態推定装置30は、路面μモデル(タイヤ接地状態推定手段)31と、車両走行状態検出器(転舵角検出手段,車速検出手段)32と、横方向運動モデル(横方向車両状態推定手段)33と、タイヤSATモデル(タイヤ力推定手段)34と、SAT計測器(タイヤ力計測手段)35と、比較器37とオブザーバゲイン38(補正信号演算手段)と、を備えている。そして、オブザーバゲイン38は、転舵角、推定路面μ、推定ヨーレート、推定車体すべり角に基づいてタイヤSATモデル34により推定された推定SATと、SAT計測器35により計測された計測SATとから演算した補正信号を路面μモデル31に帰還する。
(もっと読む)
横転抑制制御装置および横転抑制制御方法
【課題】横転抑制制御に係る制動力に起因するアンダステアの発生を抑制することにより、ロール抑制をしつつ旋回トレース性を確保する横転抑制制御装置および横転抑制制御方法を提供する。
【解決手段】横転抑制制御装置は、非アンダステア状態である旨を検出した場合には、制御閾値を第1制御閾値に設定するとともに、アンダステア状態である旨を検出した場合には制御閾値を第1制御閾値より大きい第2制御閾値に設定し(ステップ108,110,114)、検出された横転状態値が設定された制御閾値より大きい場合には、車両の車輪に制動力を付与することにより車両の横転を抑制する横転抑制制御を行う(ステップ118,120)。
(もっと読む)
車体振動推定装置
【課題】車輪速情報を用いて車体振動を常に高精度に推定し得る車体振動推定装置を提案する。
【解決手段】演算部31,32で平均前輪速VwF=(VwFL+VwFR)/2および平均後輪速VwR=(VwRL+VwRR)/2を演算し、VwF, VwRをバンドパスフィルタ処理部33,34に通して、車体共振周波数付近の成分のみを抽出して取り出し、前輪速VwFの車体共振周波数近傍振動成分fVwFおよび後輪速VwRの車体共振周波数近傍振動成分fVwRを取得する。演算部35,36では、fVwF, fVwRから前輪の前後方向変位Xtfおよび後輪の前後方向変位Xtrを求め、前輪および後輪の前後変位および上下変位間における固有の関係を基に、Xtf, Xtrから、前軸上方部の上下変位および後軸上方部の上下変位を求め、これら車体前後の上下変位から車体振動(上下バウンス速度dZv、ピッチ角速度dθp)を推定する。
(もっと読む)
車両用挙動制御装置
【課題】カーブ進入時だけでなくカーブ内においてもドライバの危険感に合った減速制御を実行することができる車両用挙動制御装置を提供する。
【解決手段】自車がカーブ内に位置すると判定した場合には、減速制御において、接近離間状態評価指標KdBに基づいた第1修正目標相対速度算出式を適正道路境界距離とカーブ内適性道路境界距離との差分をもとに修正した第2修正目標相対速度算出式を用いて第2修正目標相対速度を算出する。
(もっと読む)
車両用制御装置
【課題】車両が、想定されていなかった走行場に遭遇したときに、その走行場に対応した新たな制御アルゴリズムを自律的に創発することができる車両用制御装置を提供する。
【解決手段】本発明は、ドライバ状態、車外環境状態及び車両状態を検出する検出部10と、車両が遭遇している走行場を推定する推定部20と、過去の経験に基づく既知の走行場と車両の制御アルゴリズムとを対応付けて記憶した第1記憶部30と、推定走行場が想定内であるか、想定外の走行場であるかを判定する判定部40と、推定走行場が想定外である場合に、推定走行場に対応する制御アルゴリズムを創発する創発部50と、推定走行場が想定内である場合に、第1記憶部30から獲得した推定走行場に対応する制御アルゴリズムを車両の制御パラメータに変換し、推定走行場が想定外の走行場である場合に、創発された制御アルゴリズムを車両の制御パラメータに変換する変換手段60とを有する。
(もっと読む)
11 - 20 / 350
[ Back to top ]