
国際特許分類[B60W40/10]の内容
処理操作;運輸 (1,245,546) | 車両一般 (234,424) | 異なる種類または異なる機能の車両用サブユニットの関連制御;ハイブリッド車両に特に適した制御システム;特定の単一のサブユニットの制御に関するものではない、特定の目的のための道路走行用車両の運動制御システム (34,847) | 特定の単一のサブユニットの制御に関するものではない道路走行用車両の運動制御システムのためのパラメータの推定または演算 (1,216) | 車両挙動に関するもの (350)
国際特許分類[B60W40/10]に分類される特許
21 - 30 / 350
車両の制御装置及び車両の制御方法
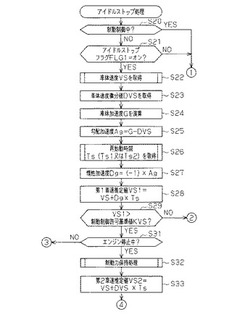
【課題】運転手によるブレーキ操作に基づき車両のエンジンを自動的に停止させる機能を有する車両において、制動制御を阻害することなくエンジンを速やかに再始動させることができる車両の制御装置及び車両の制御方法を提供する。
【解決手段】ブレーキ用ECUは、車輪に制動力が付与されない状態で走行する場合における車両の加速度の推定値として惰性加速度Dgを取得し(ステップS27)、該惰性加速度Dgに基づき第1車速推定値VS1を取得し(ステップS28)、取得した第1車速推定値VS1が制動制御許可基準値KVS未満である場合に(ステップS29:YES)、エンジンの再始動を許可する(ステップS30)。
(もっと読む)
追従制御装置

【課題】コストを抑制する上で有利なロールオーバ検出装置を提供する。
【解決手段】先行車両がない場合、自車両前方の時系列の画像から消失点Pを検出し、第1の水平基準H1を設定し、レーンマーカロールオーバ判定手段123Dにより、第1の水平基準H1の回転角から自車両100のロールオーバを判定する。先行車両があると、車両後方の特徴から水平エッジを抽出し、第2の水平基準H2を求める。レーンマーカを検出できない場合、第2の水平基準H2のみでフレーム画像間で一定以上の回転が生じているか否かを判定し、一定以上の回転が生じていなければ“ロールオーバ無し”、一定以上の回転が生じていれば“ロールオーバ有り”と判定する。レーンマーカを検出できる場合、第2の水平基準H2とレーンマーカとに一定以上の回転が生じていると判定されると“ロールオーバ有り”と判定する。
(もっと読む)
ドライバ状態検出装置
【課題】ドライバの意識喪失状態をより早い段階で検出することができるドライバ状態検出装置を提供する。
【解決手段】本発明に係るドライバ状態検出装置1では、ドライバの操舵特性であるモデルパラメータを予め算出し、車線と車両の偏差に対して、そのドライバが本来操作すると考えられる推定舵角を算出する。その推定舵角と実舵角とのずれに基づいて見かけ上の目標コースを算出し、意識喪失判定に用いる。見かけ上の目標コースが車線中心から単調に外れた場合には、それは意識喪失状態であると判断する。また、モデルパラメータが小さい場合に発生する誤判定を回避するために、自車両の進行方向の延長線上に見かけ上の目標コースがある場合にのみ意識喪失判定を行う。
(もっと読む)
車両制駆動制御装置
【課題】上り坂の道路で車両のずり下がりを抑制する技術において、推定路面勾配の誤差によって車両のずり下がりが発生してしまう可能性を低減する。
【解決手段】ずり下がり防止処理実行部46は、上り勾配路において車両の後方へのずり下がりが発生する可能性があると判定するまでは、FF演算部41を制御することで、目標車軸トルクのFF演算分を、走行抵抗に対抗して車両が目標加速度を実現するために必要な車軸トルクの推定値に到達するように算出して出力させ、また、ずり下がりが発生する可能性があると判定した後は、FF演算部41を制御することで、目標車軸トルクのFF演算分を、上記必要な車軸トルクの推定値よりも所定量αTだけ減少させた車軸トルクに到達するように算出して出力させると共に、所定量αTの減少の効果の相殺を防ぐために、FB演算部42における目標車軸トルクのフィードバック演算分の上昇を制限する。
(もっと読む)
ヨーレート補正装置
【課題】移動中にヨーレートの検出値を補正するときの補正精度を向上させる。
【解決手段】ヨーレート補正装置10は、操舵角センサ13と、ヨーレートセンサ11と、操舵角の検出値に基づき基準ヨーレートを算出する基準ヨーレート算出部21と、ヨーレートの検出値と基準ヨーレートとの差からオフセット値を算出するオフセット値算出部24と、オフセット値によりヨーレートの検出値を補正する補正部31と、基準ヨーレートの微分値とヨーレートの検出値の微分値との差が所定範囲外の場合にヨーレートの検出値の補正を禁止する補正判定部30とを備える。
(もっと読む)
すべり角推定装置
【課題】横加速度センサに異常が発生した場合は、その異常による影響を小さくしてすべり角を推定できるすべり角推定装置を提供する。
【解決手段】実車挙動観測装置302は、β推定ブロック302aが推定するすべり角推定基準値βstdを、β補償ブロック302bが算出するすべり角補償値βcで補償して、推定重心すべり角βactを推定する。β補償ブロック302bは、横加速度センサから入力される横加速度信号GSに基づいて算出するすべり角補償値βcの大きさを、β補償器リミッタ322gで上限値と下限値の間に制限し、横加速度信号GSを出力する横加速度センサに異常が発生した場合に、すべり角補償値βcが上限値より大きくなることおよび下限値より小さくなることを防止する。
(もっと読む)
すべり角推定装置
【課題】横加速度センサに異常が発生した場合は、その異常による影響を小さくしてすべり角を推定できるすべり角推定装置を提供することを課題とする。
【解決手段】実車挙動観測装置302は、β推定ブロック302aが推定するすべり角推定基準値βstdを、β補償ブロック302bが算出するすべり角補償値βcで補償して、推定重心すべり角βactを推定する。β補償ブロック302bは、横加速度センサから入力される横加速度信号GSに基づいて算出するすべり角補償値βcの大きさを、β補償器リミッタ322gで上限値βlmtuと下限値βlmtdの間に制限し、横加速度信号GSを出力する横加速度センサに異常が発生した場合に、すべり角補償値βcが上限値βlmtuより大きくなることおよび下限値βlmtdより小さくなることを防止する。
(もっと読む)
運転者状態検出方法及び運転者状態検出システム
【課題】運転者の状態が異常であるか否かをより正確に特定する。
【解決手段】運転者状態検出方法は、検出期間において車両に生じるヨーレイトを検出し(S1)、検出されたヨーレイトの実測値に基づいて、検出期間においてヨーレイトの増減が反転する反転ポイントを特定し(S3)、時間軸上で連続する2つの反転ポイントを結ぶ線分からなるヨーレイトの線形変化率を演算し(S4)、時間軸上で連続する2つの反転ポイントの間におけるヨーレイトの実測値を検査し、ヨーレイトの線形変化率とヨーレイトの実測値との差を決定してこれを相違値として取得し(S5、S6)、この相違値に基づいて、運転者の状態が異常であるか否かをを判断する(S7〜S9)。
(もっと読む)
道路勾配計測装置及び道路勾配計測方法
【課題】道路勾配の計測精度の向上を図る。
【解決手段】GPS12の受信感度が所定のレベル以上であって標高に変化が検出された場合、勾配算出部25は、GPSデータ取得部21によりGPS12から取得された走行速度、標高等のデータを用いて道路の勾配を算出する。標高に変化がないとき、定地走行抵抗算出部22は、ECUデータ取得部23により取得されたECUデータを用いて定地走行抵抗を算出し、定地走行抵抗保持部27に保持させる。このときの勾配は0である。GPS12の受信感度が所定のレベルに達していないとき、勾配算出部25は、保持されている定地走行抵抗とECUデータ取得部23により取得されたECUデータを用いて道路の勾配を算出する。
(もっと読む)
マップデータを使用する乗物ESCシステムのための方法及びシステム
【課題】乗物用の改良型電子安定性制御システムを提供する。
【解決手段】乗物用の電子安定性制御(ESC)システムが開示される。電子制御ユニット(ECU)は、乗物のブレーキ及びスロットルの動作に変更を加えることで、意図された乗物方向及び/又はヨーレートと、実際の乗物方向及び/又はヨーレートとの間の差を減少することにより、乗物の横滑りを減少するようにプログラムされる。ESCシステムは、車輪速度センサ、ハンドル位置センサ、ヨーレートセンサ、及び横方向加速度センサから入力を受け取る。又、ESCシステムは、乗物が位置している道路の特性を少なくとも指示する入力も受け取り、乗物が位置する道路は、マップデータベースを使用するポジショニングシステムから決定され、又、特性は、マップデータベースから決定される。
(もっと読む)
21 - 30 / 350
[ Back to top ]