
国際特許分類[B62D5/04]の内容
処理操作;運輸 (1,245,546) | 鉄道以外の路面車両 (62,921) | 自動車;付随車 (46,083) | 動力補助または動力駆動される操向 (7,105) | 電気的なもの,例.操向伝動装置に,連結され,またはその一部を形成する電気サーボモータを用いるもの (5,655)
国際特許分類[B62D5/04]に分類される特許
41 - 50 / 5,655
電動式パワーステアリング装置用の軸連結機構
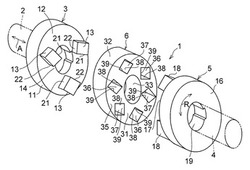
【課題】長期の使用によっても一方の回転軸である例えば電動モータの出力回転軸に連結された回転軸と他方の回転軸である例えばステアリングホイールに連結されたステアリング軸との間に軸心周りの方向についてのガタが生じ難く、しかも、電動モータの反転時の衝撃及びブラシ振動のステアリングホイールへの伝達を低減でき、而して、耐久性に優れ操舵感覚を不快にさせない電動式パワーステアリング装置用の軸連結機構を提供すること。
【解決手段】電動式パワーステアリング装置用の軸連結機構1は、回転軸2に連結された連結基体3と、ステアリング軸4に連結された連結基体5と、両連結基体3及び5間に配されていると共に連結基体3のR方向の回転を連結基体5にR方向の回転として伝達する回転伝達部材6とを具備している。
(もっと読む)
電動パワーステアリング制御装置

【課題】車両のヨー応答を低下させることなくロール振動を抑制する
【解決手段】EPSシステム1では、アシスト補償量演算部22が、車両の運転者によるハンドルの操作が反映された操舵トルクと、車両の挙動が反映された推定路面反力とに基づき、次の(a)および(b)の2つのゲイン特性を満たすようにアシスト補償量を演算する。(a)操舵トルクに対する補正アシスト量のゲイン特性については、操舵トルクの周波数が予め設定された第1設定周波数を超えると、周波数が高くなるにつれて補正アシスト量のゲインが徐々に減少する1次フィルタの形状を有する。(b)推定路面反力に対する補正アシスト量のゲイン特性については、推定路面反力の周波数が、第1設定周波数より高くなるように予め設定された第2設定周波数になるまでは、周波数が高くなるにつれて補正アシスト量のゲインが徐々に増加する、推定路面反力の微分特性を有する。
(もっと読む)
ステアリング装置およびフォークリフト
【課題】機械的な接触を行うことなく、実際の操舵角を目標操舵角で適切に維持できるようにする。
【解決手段】実際の操舵角(検出操舵角)が目標操舵角に到達するまでは、ステアリング51の操作トルクに応じて操舵輪に付与される操舵トルクが、漸減舵角範囲にわたって上限値から下限値にまで減少していく一方、目標操舵角に到達した以降は、逆方向の操舵トルクが、この漸減舵角範囲よりも狭い急峻舵角範囲にわたって下限値から上限値にまで増加していく。このように、操舵トルクが変化する操舵角範囲を、目標操舵角への到達以降において狭くすることで、操舵トルクの変化率が大きくなるため、その到達前に比べて操舵トルクが急峻に上限値まで増加していく。こうして、実際の操舵角が目標操舵角に到達した以降は、逆方向の操舵トルクが十分に大きくならない、というような操舵角範囲も当然狭くなる(漸減舵角範囲>急峻舵角範囲)。
(もっと読む)
電動パワーステアリング用電子制御ユニット
【課題】一層の小型化をはかるとともに配線設計の自由度を得ながら装置の信頼性を向上させる。
【解決手段】電動パワーステアリング用電子制御ユニットに含まれる第1基板11と第2基板12は、外部接続コネクタ30が一体形成されたコネクタケース13を介して積層され、コネクタケースの第1の縁部と第2の縁部には、第1の面実装部品110と第2の面実装部品120とを接続するインサートモールド成形された端子群131,132,133がそれぞれ実装される。第2基板12に実装された第2の面実装部品120のそれぞれは、第1の縁部に実装された端子群と第2の縁部に実装された端子群のうち、近くに位置する端子群に選択的に接続される配線レイアウト構造を有する。
(もっと読む)
磁界角計測装置およびそれを用いた回転機
【課題】磁束発生体が高速に回転する場合であっても、磁束発生体または磁気センサの近傍に非磁性の導体(導電体)を配置した構成を用いて精度良く磁界角または回転角を計測すること。
【解決手段】磁界方向に感応する磁気センサ70と、非磁性の第1の導体240と、非磁性の第2の導体242とを備えた磁界角計測装置であって、前記磁気センサは、前記第1の導体と前記第2の導体との間に配置され、前記第1の導体中の渦電流が前記磁気センサに及ぼす磁界と、前記第2の導体中の渦電流が前記磁気センサに及ぼす磁界とが、互いに打ち消しあう構成とする。
(もっと読む)
電動パワーステアリング装置
【課題】中空シャフトをラックハウジングに対して軸方向に移動可能に支持するとともに、中空シャフトのがたつきを抑制できる電動パワーステアリング装置を提供する。
【解決手段】電動パワーステアリング装置は、中空シャフトとしてのモータシャフト16を回転可能に支持する第1の軸受18の軸方向両端にそれぞれ設けられ、第1の軸受18をラックハウジング5に対して軸方向に弾性支持する弾性部材34と、第1の軸受18の外周に設けられ、径方向への変位を規制した状態で第1の軸受18を支持する支持部材41とを備えた。そして、モータシャフト16を、第1の軸受18が弾性部材34を弾性変形させつつ支持部材41に対して摺動するとともに、第2の軸受が軸方向に移動することにより、ラックハウジング5に対して軸方向に移動するように設けた。
(もっと読む)
電動パワーステアリング装置
【課題】トルクセンサ、または電流センサの異常時においても、継続して安定したステアリング操作を行なうことのできる電動パワーステアリング装置を提供することにある。
【解決手段】ステアリングの操舵トルクを検出するトルクセンサと、操舵軸に加わる軸力を検出する軸力センサと、モータに流れる実電流を検出する電流センサとを備え、更に、トルクセンサ、軸力センサ及び電流センサの異常を検出する異常検出手段を有する。そして、上記異常検出手段により、軸力センサが正常、且つトルクセンサが異常の場合には、軸力センサにて、トルクセンサの値を推定する。また、軸力センサが正常、且つ電流センサが異常の場合には、軸力センサ及びトルクセンサにて、電流センサの値を推定することができる構成とした。
(もっと読む)
電動パワーステアリング用電子制御ユニット
【課題】一層の小型化をはかるとともに配線設計の自由度を得ながら装置の信頼性を向上させることができる、電動パワーステアリング用電子制御ユニットを提供する
【解決手段】電動パワーステアリング用電子制御ユニット(ECU1)は、第1の面実装部品(制御用面実装部品110)が実装される第1基板(制御基板11)と、第1の面実装部品より許容電流容量が高い第2の面実装部品(パワー用面実装部品120)が実装される、第1基板と略同一部品実装面積を有する唯一の第2基板(パワー基板)とを有し、第1基板と第2基板とを積層した基板実装構造から成る。
(もっと読む)
電動パワーステアリング用の電子制御ユニット
【課題】 小型の電動パワーステアリング用の電子制御ユニットを提供する。
【解決手段】 電動モータ43と一体に形成される電動パワーステアリング用の電子制御ユニット43は、電動モータ43に駆動信号を供給するスイッチング回路110を有する第1の基板100と駆動信号の元となる電源電圧を平滑する電解コンデンサ210を有する第2の基板200とスイッチング回路100を制御する制御回路を有する第3の基板300と第1の基板100、第2の基板200及び第3の基板300を格納するユニットカバー420とを備える。ユニットカバー420の開口部425は、電動モータ43を格納するモータカバー430によって閉じられ、第1の基板100、第2の基板200、第3の基板300及びモータカバー430は、電動モータ43のモータ軸450の方向DR1にモータカバー430第3の基板300第2の基板200及び第1の基板100の順で配置される。
(もっと読む)
ラックピニオン式操舵装置
【課題】車両への搭載性に優れ、且つラックとピニオンの噛み合い率を高くできるラックピニオン式操舵装置を提供する。
【解決手段】ウォームホイール15の回転軸(第2操舵軸7の出力軸7b)とピニオン軸23とを、互いの軸角βを所望に設定可能な第1傘歯車81および第2傘歯車82を介して連結する。ラック26とピニオン25の噛み合い率を高くするように、ラック軸24の第2直交平面P2に対するピニオン軸23の中心軸線C4の傾斜角θを大きくする。電動モータ11のモータハウジング11aが、車両の他の部品と干渉することを防止するべくウォーム軸14および電動モータ11の出力軸12をラック軸24と平行に配置する。
(もっと読む)
41 - 50 / 5,655
[ Back to top ]