
国際特許分類[B64C13/20]の内容
処理操作;運輸 (1,245,546) | 航空機;飛行;宇宙工学 (5,482) | 飛行機;ヘリコプタ (2,562) | 飛行操縦翼面,揚力増加フラップ,空気制動装置,またはスポイラを作動するための操縦系統または伝達系統 (300) | 入力装置 (189) | 自動的に作動されるもの,例.突風検出器に応答するもの (170) | 無線信号を使用するもの (81)
国際特許分類[B64C13/20]に分類される特許
51 - 60 / 81
姿勢制御装置

【課題】 気流の変化に対して模型航空機を安定した姿勢に保つ姿勢制御装置を提供すること。
【解決手段】 アンテナ14は、電波を受信する。受信機51は、アンテナ14を介して、機体を制御する制御信号を受信する。水平方向検出センサー20aは、機体の水平方向の傾きを検出する。垂直方向検出センサー20bは、機体の垂直方向の傾きを検出する。フィードバック制御器52は、受信機51からの制御信号と、水平方向検出センサー20aによる傾きと、垂直方向検出センサー20bによる傾きから機体が一定の姿勢で飛行していないと判断したとき、機体を一定の姿勢に保つための信号を出力する。この信号により、サーボモータ21、22、23が機体を一定の姿勢に保つために動作する。
(もっと読む)
自律制御無人飛行体の飛行管理方法

【課題】自律制御無人飛行体の飛行の妥当性を判断するとともに、これが盗難や不正輸出された場合などにはその自律制御による飛行自体を不可能とする。
【解決手段】飛行ルートプログラムに飛行プランの諸元データを入力・設定するための個別の操作パスを事前に付与する操作パス付与段階と、操作パスを用いて諸元データを入力して飛行ルートを設定する飛行ルート設定段階と、無人飛行体の飛行プランを飛行管理センタの飛行認証サーバに送信する飛行申請段階と、飛行認証サーバが飛行の妥当性を判断する妥当性判断段階と、飛行認証サーバが飛行の妥当性を認めた場合に諸元データを設定した飛行ルートプログラムを申請者に返信する飛行許可段階と、予め飛行基本プログラムが格納された無人飛行体に飛行ルートプログラムを格納することで、飛行ルートプログラムおよび飛行基本プログラムを協動させて無人飛行体を飛行させる飛行段階と、を有する。
(もっと読む)
模型用ラジオコントロール送信機
【課題】機械的手段に依らず、被操縦体の可動部位の最大制御量を超えないように制御量を制限することができる模型用ラジオコントロール送信機を提供する。
【解決手段】操作部の操作に応じて被操縦体の可動部位の制御量を制御する制御信号を送信する模型用ラジオコントロール送信機において、操作部の操作による少なくとも二以上の制御量の加算量となる加算制御量を算出し、加算制御量が被操縦体の可動部位に応じて設定される最大制御量を超えるか否かを判定するとともに、加算制御量が最大制御量を超える場合には制御量が補正される。
(もっと読む)
航空機衝突感知および回避システムならびに方法
衝突感知および回避システムならびに方法と、当該衝突感知および回避システムを含む、無人操縦飛行体(UAV)および/または遠隔操縦飛行体(RPV)のような航空機とである。衝突感知および回避システムは、当該航空機に対して起こり得る衝突脅威を識別し、いかなる認識された脅威も回避する操作を提供する画像インテロゲータを含む。モーションセンサ(例えば、結像および/または赤外線センサ)が、周囲の画像フレームを、当該フレームにおいて移動している近くの目標を検知するクラッタ抑制および目標検知ユニットに提供する。見通し線(LOS)複数目標追跡ユニットが検知された近くの目標を追跡し、LOS座標において、各検知された近くの目標についての進路履歴を維持する。脅威評定ユニットが、いずれかの追跡された近くの目標が衝突脅威を伴うかどうかを判断する。回避操作ユニットが、飛行制御およびガイダンス部に、いずれの識別された前記衝突脅威も回避する操作を与える。 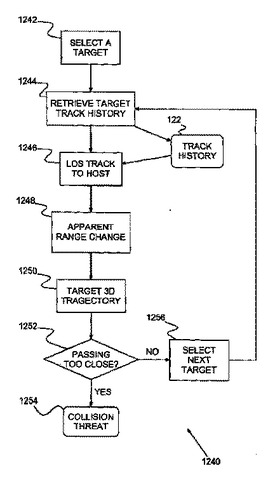 (もっと読む)
(もっと読む)
無人機の無線制御および関連する偵察データへのアクセス
無人機(UAV)を制御することは、無線デバイス(例えば、携帯電話)を使用し、無線通信ネットワーク(例えば、もっぱら携帯電話通信用に構成されている既存携帯電話ネットワーク)を介して制御メッセージをUAVの受信機に送信することにより実行されうる。それに加えて、無線デバイスは、前記UAVの送信機からの通信を受け取るために使用され、また無線デバイスは、無線ネットワークを介して送信機から通信を受け取る。このような通信の実施例は、偵察情報およびUAV監視情報を含む。  (もっと読む)
(もっと読む)
無人ヘリコプタ
【課題】急激に立ち上がる横風を受けた場合であっても、安定した姿勢を保つことができる無人ヘリコプタを提供する。
【解決手段】無人ヘリコプタ1は、例えば追い風wを受けながらの高速飛行中に旋回する場合など、急激に立ち上がる横風を受けたときに、符号aで示すように、機首2の方向を風上方向と略一致させる。これにより、風を受ける機体3の投影面積が減って風を逃がすことになるので、機体3のロール角を小さくすることが可能となり、結果として、無人ヘリコプタ1の姿勢を安定させることができる
(もっと読む)
無人ヘリコプタおよび外部環境推定装置
【課題】第1には、外部環境を推定する。第2には、安定した飛行を実現する。
【解決手段】無人ヘリコプタ1が風wを浴びると、無人ヘリコプタ1は、位置および速度を目標位置および目標速度に保つために、姿勢を変更する(点線r)。このように風wの影響を受けると、無人ヘリコプタ1は、姿勢を自動的に変更するため、無人ヘリコプタ1の理想的な目標姿勢(点線t)と実際の姿勢との間には偏差αが生じることとなる。本発明では、その偏差αから風の有無や風量等の外部環境の状況を推定する。この推定値に基づいて無人ヘリコプタ1の飛行速度等を設定することより、安定した姿勢での飛行を実現することができる。
(もっと読む)
無人ヘリコプタ
【課題】GPSに異常が発生した場合であっても、機体を安定して制御することができる無人ヘリコプタを提供する。
【解決手段】GPS13,14に異常が発生すると、第3のフィルタ23が選択される。第3のフィルタ23は、入力部16を介して入力されるユーザの操舵の操作量に基づいてINS11の出力を補正する。これにより、INS11による積分速度が発散するのを防ぐことが可能となる。結果として、GPSに異常が発生した場合であっても、機体を安定して制御することができる。
(もっと読む)
無人ヘリコプタ及びこれに搭載される切断装置
【課題】パイロットロープの延線を円滑かつ安全に行えるようにする。
【解決手段】本体フレーム11と、本体フレーム11の上方に設けられるメインロータ14と、本体フレーム11の後方に延びるテールブーム13と、テールブーム13の端部に設けられるテールロータ15とを有する、地上局5から無線送信されてくる位置目標値に従ってGPSを利用した自律航行が可能な無人ヘリコプタ10において、本体フレーム11の下方に設けられ、機軸方向に平行に延びる棒状のロープガイド31と、本体フレーム11の下方に設けられ、ロープガイド31に沿って引き出されるロープ4が巻回された、無線による遠隔制御によって引き出し/巻き取りのための制御が可能なリール33と、を設けることとする。
(もっと読む)
自動姿勢制御装置、自動姿勢制御方法及び自動姿勢制御プログラム
【課題】推力の急激な変化や突風等の外乱に応じて、速やかに応答すると共に、対気速度が不十分な場合でも、機体の姿勢を確実に制御して、機体の安定性を確保する。
【解決手段】制御部9は、現在の重心位置情報を記憶部11から取得し、現在の推進モータ21の回転速度を検知し、予め知られた推力に対応する推進用モータ21の回転速度と、適正なピッチ角に対応する適正な重心位置との間の関係に基づいて、現在の回転速度に対応する適正な重心位置情報を算出し、適正な重心位置と現在の重心位置とに基づいて、バッテリ26の前後方向に沿った必要な変位量を求め、対応する重心変動用モータの回転量を求め、必要な回転量に対応する制御信号をモータ駆動部19へ与える。
(もっと読む)
51 - 60 / 81
[ Back to top ]