
国際特許分類[B65B35/36]の内容
処理操作;運輸 (1,245,546) | 運搬;包装;貯蔵;薄板状または線条材料の取扱い (154,615) | 物品または材料を包装するための機械,器具,装置または方法;荷解 (11,467) | 包装される物品の繰出し,供給,整列または方向づけ (821) | グループに物品を整列したり,物品をグループで供給したりすること (437) | 把持体によるもの (99)
国際特許分類[B65B35/36]の下位に属する分類
吸引作用をする把持体によるもの (37)
国際特許分類[B65B35/36]に分類される特許
51 - 60 / 62
容器搬送装置、ワーク搬送装置、容器形成装置、容器搬送方法、ワーク搬送方法および容器形成方法

【課題】進行方向に隣接した容器どうしが接触した状態の容器列の側面に容器を分離してスライドさせる機構を設置する場所を確保することができなくても、容器列から容器を安定して分離することを課題とする。
【解決手段】 進行方向に隣接した容器どうしを接触させて搬送するコンベア110と、このコンベアにおける進行方向の端部に隣接して設けられた取出台120と、コンベア110上で接触した容器どうしの間に形成される隙間SP1に上方から挿入可能な上下方向挿入部材130と、容器を押し退けないように上下方向挿入部材130を上方から隙間SP1に挿入させ、当該上下方向挿入部材を進行方向へ移動させることにより、当該隙間を形成する互いに接触した容器のうちの進行方向側の容器を進行方向へスライドさせて取出台120上に載置させるスライド機構とを設けた。
(もっと読む)
イチゴ自動収容方法と、イチゴ自動収容装置と、イチゴ収容容器
把持手段によりイチゴの蔓を把持し、把持手段を容器側に移動させて把持手段で把持しているイチゴを容器の上まで送り出し、把持手段が送り出されるにつれて把持手段に把持されているイチゴが容器への収容に適した姿勢となるように把持手段の姿勢を変え、その後に把持手段によるイチゴの蔓の把持を開放してイチゴを容器内に収容し、収容後は把持手段を戻し、容器はイチゴ収容時には停止させ、収容後は容器内の次の収容箇所がイチゴ収容位置に来るまで移動させ、前記把持手段によるイチゴの把持、把持手段の移動、把持手段の姿勢変更、把持手段によるイチゴ把持の開放、容器へのイチゴの収容を繰り返して、一つの容器に順次自動的にイチゴを収容する。  (もっと読む)
(もっと読む)
球状農作物移載用の把持機構

【課題】 球状農作物を傷つけることなく確実に掴み取ることができるとともに、メンテナンス性にも優れた把持機構を提供する。
【解決手段】 開閉自在な複数のフィンガー45を、上部支点aを中心にして揺動開閉自在なフィンガーアーム47の下端部から弾性樹脂材製のフィンガー本体48を下方に向けて延設して構成するとともに、このフィンガー本体48の下方遊端部を、フィンガー駆動リンク56によって内外方向に駆動変位させるよう構成してある。
(もっと読む)
球状農作物の包装装置
【課題】 上向きの投入口に挿入供給された球状農作物を包装シートでくるんで封止するよう構成した包装装置本体に、球状農作物を載置搬送するコンベアと、このコンベアによって所定位置まで搬送されてきた球状農作物を取り出して前記投入口に供給する移載装置とを装備した球状農作物の包装装置を、取り出し性能および押し込み供給性能を低下させることなく小型化する。
【解決手段】 移載装置3に、球状農作物wを掴み取る把持機構30と、把持機構30を一定姿勢のままで昇降させる昇降機31と、この昇降機構31を横移動させて把持機構30をコンベア2と投入口7との間で往復移動させる横移動機構32とを備えてある。
(もっと読む)
薬剤ピッキングシステム
【目的】 未だカットされていない完全シートとカットした残りの残部シートを確実且つ容易にピッキングできる薬剤ピッキングシステムを提供する。
【構成】 完全シート収納部及び残部シート収納部を多数配置して成る薬品棚と、前記完全シート収納部内に積層された完全シートの中の一番上側の完全シートの平坦状底面を吸着する吸着ヘッドと、前記残部シート収納部に収容された1枚の残部シート又は完全シートの端部を把持するチャックユニットと、前記残部シート又は完全シートから1個以上の錠剤を含む端数シートを切り離すカッティング部と、前記吸着ヘッド及び前記チャックユニットの下方に配置されたシート受け取り部と前記吸着ヘッド及びチャックユニットを一緒にX及び/又はY方向に移動させる移動機構と、を備えている。
(もっと読む)
交互の層状に積み重ねるボトルのパレット搭載方法
交互の層状に積み重ねるとともに層間シートを挿入することにより、立った状態で正方形に整列されたボトルのパレット搭載方法であって、a内径の大きい把持ヘッドにより、一バッチのボトルを取る段階と、bバッチのボトルをテンプレート上に設置する段階と、c把持ヘッドの圧力を解放する段階と、dボトルの首部に層間シートを押し込む段階と、e前記テンプレートと前記層間シートとの双方により押し込まれたボトルの位置に適合している把持ヘッドの圧力を回復させる段階と、fバッチをパレット搭載ステーションへ移送する段階と、g前記ボトルをパレットの上に設置し、前記把持ヘッドの圧力を解放する段階と、次に、h希望する層数になるまで前記の段階を繰り返す段階と、を有し、前記テンプレート11は前記収集ステーションと前記パレット搭載ステーションの間に設置されていることを特徴とするボトルのパレット搭載方法。 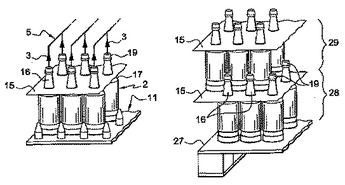 (もっと読む)
(もっと読む)
物品保持装置
【解決手段】 物品保持装置は、複数の物品1が載置されるコンベヤ(載置手段)4と、支持部材14に設けられてそれぞれ上記コンベヤ上の物品を保持する複数のグリッパ(保持手段)15A、15Bと、上記支持部材を昇降移動させるロボット(駆動手段)11と、それらを制御する制御装置16とを備えている。上記制御装置は、空の第2グリッパ15Bで物品1を保持する際には、既に他の第1グリッパ15Aで保持されている物品の下面がコンベヤ4に当接しない高さ位置に上記支持部材14を位置制御した状態で、上記第2グリッパ15Bで物品を保持させるようになっている。
【効果】 従来は、グリッパで保持されている物品の下面がコンベヤに当接しないように各グリッパを昇降させるエアシリンダを設けていたが、これを設けることなく物品の下面とコンベヤとの当接が防止できる。
(もっと読む)
出版製品包装装置のスラスタを備えているコンベヤに個々のシート状製品を供給する方法
【課題】出版製品包装装置のスラスタを備えているコンベヤに個々のシート状製品をフィーダにより正確にかつ装置全体の作動速度にかかわりなく供給できるようにする。
【解決手段】前記フィーダ(11)が前記シート状製品(10)のパイル(12)を包含し、前記個々のシート状製品(10)が前記パイル(12)の底部から滑り出されて、回転ディスク(19)に一体に取り付けられているグリッピング要素(18)によりグリップされ、前記スラスタ(14)を備えているコンベヤ(13)に向かって供給されるものにおいて、前記個々のシート状製品(10)を受ける一対のローラ(21)を前記回転ディスク(19)の下流に配設し、前記コンベヤ(13)が最適速度とは異なる速度で前記個々のシート状製品(10)の1排出サイクル(K)の少なくとも一部分(4/8−6/8)を前進する速度とは異なる速度で前記ローラ(21)を駆動させる。
(もっと読む)
食品の分配及び包装用方法及び装置
少なくとも2つの食品を同一包装物内に包装する、寸法の変わる食品を包装する方法であって、各食品の量を算定する段階と、オブジェクトコンベヤー(2)上の各食品の位置を記録する段階と、各食品を収集領域まで移動させる段階と、食品が部分キャリア(4)まで移動されるべきかをコンピュータプログラムによって決定し、こうした移動が決定された場合、いずれの部分キャリアー(4)に前記食品が移動されるべきかもを決定する段階と、前記食品を持ち上げて部分キャリア(4)まで移動されるべき前記食品を持ち上げる段階と、前記食品を選択された前記部分キャリア(4)まで移動させ、かつ該食品を前記部分キャリア(4)に解放する段階と、を含む方法。 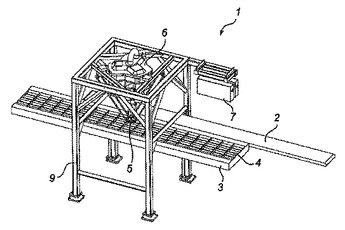 (もっと読む)
(もっと読む)
包装装置
【課題】製品20を継続的に包装する。
【解決手段】包装装置10は、レーンサイズが変更可能であり、製品を製品セットとし、プロダクトセットを所定の制御方法によってレーンチェーン速度に加速させるデュアルサーボグループ化機構110を有するグループ化機構14を有する。グループ化機構14は、レーンに設けられたカム面64によってレーンに回転するタイミング突起60をさらに有する。タイミング突起60が製品セットをレーンの下流側へ押し進めたときに、カム面の上昇した表面に製品が乗る。このため、製品セットの製品の間に間隔が開くことが抑制される。
(もっと読む)
51 - 60 / 62
[ Back to top ]