
国際特許分類[B65G47/91]の内容
処理操作;運輸 (1,245,546) | 運搬;包装;貯蔵;薄板状または線条材料の取扱い (154,615) | 運搬または貯蔵装置,例.荷積みまたは荷あげ用コンベヤ;工場コンベヤシステム;空気管コンベヤ (20,388) | コンベヤに関連して物品または物質の取り扱い装置;そのような装置を用いる方法 (3,876) | 特定の種類または型の供給,移送,または排出装置 (1,152) | 物品または物質の取り上げかつ置くための装置 (371) | 空気式,例.吸引式,クリツパと協働するもの (140)
国際特許分類[B65G47/91]に分類される特許
1 - 10 / 140
ワーク移載装置
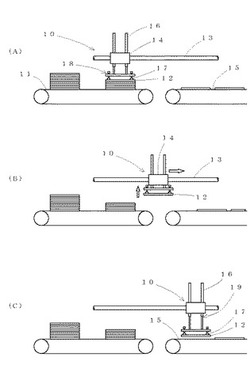
【課題】高さが変動する段積み状態のワークを順次吸着し移載することができる設定調整が簡単で、安価なワーク移載装置を提供する。
【解決手段】ワーク12を落下載置させるワーク移載装置10であって、吸着ヘッド下降当接停止機構18と、吸着ヘッド下降近接部停止機構19を有し、前記機構は、緩衝器20、支持板21、透過型センサを備え、これによる検知による信号で、エアシリンダ16の電磁弁23のソレノイドへの通電を止めるような機構からなると共に、後記機構は、エアシリンダ15に上昇端スイッチ24と、下降端スイッチ25を備え、この通電による停止と同時に吸引を解除する機構からなり、前記機構の作動中は、上昇端スイッチ24を起動させ下降端スイッチ25を停止し、後記機構の作動中は、上昇端及び下降端スイッチ24、25の通電を起動させワーク12を吸着すると共に、可動する所定位置に載置する。
(もっと読む)
物品搬送装置

【課題】簡略化した構造のロボットハンドを使用しても、容器に物品を刺身重ね状に綺麗に載置することが可能な物品搬送装置を提供する。
【解決手段】容器搬送コンベヤ4は、幅方向Yで水平面に対し傾斜した載置面16aに容器3を載置して搬送する第一搬送部15と、第一搬送部15で物品1が載置された容器3を受渡部18に搬送する際に容器3を傾斜状態から略水平状態に変換する第一姿勢変換部17と、受渡部18,22で容器3を略水平状態から第一搬送部15とは逆向きに傾斜させる第二姿勢変換部23と、容器3を略水平状態に戻して搬送する搬送ベルト21とを備えている。ロボットは、載置面16aに傾斜姿勢で載置された容器3に複数の物品1を載置する際に、第一搬送部15で水平面に対し物品1のなす角度を、搬送ベルト21にて略水平姿勢にある容器3内で各物品1が水平面に対しなす角度より小さくして、各物品1を刺身重ね状に容器3に載置する。
(もっと読む)
物品搬送装置
【課題】任意の間隔や向きで搬送されてきた物品を高速に搬送する。
【解決手段】物品認識手段により得た物品10の位置に関する情報に基づき、物品10を吸着する順序を定めて回転体20の回転中にアーム32を該情報に応じた回動角度で回動させて物品10を吸着具34で吸着する。物品10の向きに関する情報に基づき、物品10が載置位置Xにおいて特定の方向に向くように吸着具34を回転させて、物品10を載置位置Xを載置する。
(もっと読む)
物品分類装置
【解決手段】 ストッカ7に載置された複数の分類トレイ6を、複数のトレイグループにグループ化し、さらに供給位置(排出ステーション13F)とストッカとの間に設けた中間ステージに上記ストッカの各トレイグループに対応する載置領域F1〜F5を設定する。
また中間ステージ4へと物品(LED素子1)を移載する第1移載手段5と、ストッカ7の所要の分類トレイ6へと物品を移載する第2移載手段8とを設けて、上記第1移載手段5が物品を中間ステージ4の所要の載置領域に移載すると、上記第2移載手段8は当該載置領域の複数の物品を保持して、上記ストッカ7の対応する分類トレイ6に移載する。
そして第2移載手段が物品をストッカの分類トレイに移載する間、上記第1移載手段は上記供給位置からの物品の取り出しを継続して行う。
【効果】 物品分類装置の稼働効率を高くすることが可能である。
(もっと読む)
選果システム
【課題】移送装置の吸着ノズル内にゴミが残留することによって吸着ノズルにおける青果物の吸着能力が低下することを防止することができる選果システムを提供することを課題とする。
【解決手段】載置台搬送装置51によって搬送される載置台5に載置される青果物6を吸着ノズル66の先端部で吸着してトレイ8へ移送する移送装置60を備え、載置台5に載置される青果物6をトレイ8に詰める、選果システム1であって、移送装置60は、吸着ノズル66の先端部から空気を噴射可能に構成され、吸着ノズル66の先端部から空気を噴射することにより吸着ノズル66内のゴミを排出するように構成される。
(もっと読む)
選果システム
【課題】移送装置による載置台からトレイへの青果物の移送能率の低下を極力抑制するとともに、載置台からトレイへ青果物を移送する際に移送装置の吸着部に吸着された青果物が当該吸着部から落下することを抑制することができる選果システムを提供することを課題とする。
【解決手段】載置台搬送装置51によって搬送される載置台5に載置される青果物6を吸着部66で吸着してトレイ8へ移送する移送装置60を備え、載置台5に載置される青果物6をトレイに詰める、選果システム1であって、移送装置60は、青果物6を吸着した状態で吸着部66が上方へ移動するときの平均速度、または、青果物6を吸着した状態で吸着部66が下方へ移動するときの平均速度が、青果物6を吸着した状態で吸着部66が水平方向へ移動するときの平均速度に比べて遅い速度となるように構成される。
(もっと読む)
選果システム
【課題】移送装置の吸着部にて青果物のがく片部を吸着する際に、載置台の側方からその中央側に向かうように吸着部を移動させたときに当該吸着部が青果物が載置される載置台に当接することを防止して、青果物を確実に吸着してトレイへ確実に移送することができる選果システムを提供することを課題とする。
【解決手段】載置台搬送装置51によって搬送される載置台5に載置される青果物6のがく片部6bを吸着部66で吸着してトレイ8へ移送する移送装置60を備え、載置台5に載置される青果物6をトレイ8に詰める、選果システム1であって、移送装置60の吸着部66にて青果物6のがく片部6bを吸着する際に、載置台5の側方からその中央側に向かうように吸着部66を移動させたときに、吸着部66が載置台5に当接しない位置に青果物6を押上げる、押上げ装置80を有する。
(もっと読む)
選果システム
【課題】選果システムにおける移送装置による載置台からトレイへの青果物の移送能率を向上させることができる技術を提供することを課題とする。
【解決手段】載置台搬送装置51によって搬送される載置台5に載置される青果物6を、トレイ搬送装置53によって搬送されるトレイ8へ移送する移送装置60を備え、載置台5に載置される青果物6を等級や階級毎に前記トレイ8に詰める、選果システム1であって、移送装置60は、青果物6を吸着する吸着部66を複数個備え、複数個の吸着部66・66・・・にて複数個の青果物6・6・・・を一度に吸着可能に構成される。
(もっと読む)
リーク検査装置
【課題】キャリア内に収容されて搬送される間に液体の充填およびキャッピングが行われた容器が、傷付きやピンホール等の欠陥があった場合に、キャリアごとリジェクトし、その位置に空のキャリアを補充する。
【解決手段】搬送コンベヤに等間隔で設けられたキャリア保持手段8に、キャリア2を保持させて搬送する。容器供給ポジションAでこれらキャリア2に空の容器6を供給し、液体の充填およびキャッピングを行った後、検査ポジションDで、キャリア2とヘッダー40とによって密閉空間42を形成して、この空間42内を真空ポンプ46で吸引し、圧力センサ48によって圧力を測定する。設定した圧力よりも高い圧力が検出されたときには、判定手段50が不良容器と判定して、リジェクトポジションEでキャリア2ごとリジェクトする。その後、補充ポジションFで空のキャリア2を補充する。
(もっと読む)
ワーク受渡装置及びワーク受渡方法
【課題】ワークの形状等により整列して隣接するワーク同士が係合あるいは付着していても、ワークを一つずつ分けて受け渡すことができるワーク受渡装置及びワーク受渡方法を提供すること。
【解決手段】ワーク受渡装置1は、整列装置100の整列路から送り出す先頭のワークWを載置する昇降載置面11を有する昇降架台10と、昇降載置面11に隣接して、整列路面101の高さと異ならせた高さに設けられ搬送装置200にワークを受け渡す受渡載置面21を有する受渡載置台20と、昇降架台10の昇降載置面11を整列路面101と受渡載置面21との高さ位置に昇降駆動させる昇降駆動手段40と、受渡載置面21に対向して設置した支持ブロック30と、支持ブロック又は受渡載置台のいずれか一方に吸引開口31を形成して昇降載置面11のワークを吸引して受渡載置面21に受け渡す吸引機構50と、を備える構成とした。
(もっと読む)
1 - 10 / 140
[ Back to top ]