
国際特許分類[B65G59/02]の内容
処理操作;運輸 (1,245,546) | 運搬;包装;貯蔵;薄板状または線条材料の取扱い (154,615) | 運搬または貯蔵装置,例.荷積みまたは荷あげ用コンベヤ;工場コンベヤシステム;空気管コンベヤ (20,388) | 物品の積みおろし (253) | 積み山の頂上からの積みおろし (87)
国際特許分類[B65G59/02]の下位に属する分類
吸引または磁石装置によるもの (31)
国際特許分類[B65G59/02]に分類される特許
11 - 20 / 56
積層ワーク切り出しシステムおよび積層ワーク切り出し方法
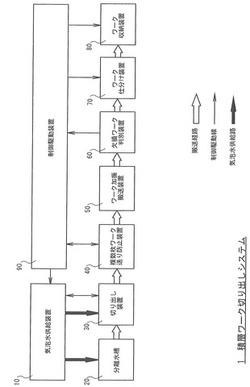
【課題】分離促進されて貼り付き力を低減した状態の積層ワークから薄型のワークを所定押圧力で連続して一枚ずつ切り出し、円滑に搬送する積層ワーク切り出しシステムおよび積層ワーク切り出し方法を提供する。
【解決手段】積層ワークの分離を促進する分離水槽20と、積層ワークの分離を促進しつつ、切り出しコンベアが積層ワークの最上のワークを切り出す切り出し装置30と、二枚以上のワークの通過を防止する複数枚ワーク送り防止装置40と、ワークを加振しつつ搬送してワークの割れの入ったコーナー部を欠損させるワーク加振搬送装置50と、搬送されるワークのコーナー部の欠損を検出する欠損ワーク判別装置60と、欠損ワークを回収し良品のワークを下流へ流すワーク仕分け装置70と、良品のワークを収納するワーク収納装置80と、を備える積層ワーク切り出しシステム、および、このシステムを用いる積層ワーク切り出し方法とした。
(もっと読む)
タバコ搬送機構

【課題】上下方向に積載されているタバコパッケージを最上位から取り出してローラコンベアで搬出することができるタバコ搬送機構を提供する。
【解決手段】複数個のタバコパッケージSTPが上下方向に商品リフタ110に積載される。リフタ昇降機構が商品リフタ110を昇降させて積載されているタバコパッケージSTPを昇降させる。動作制御ユニットがリフタ昇降機構による商品リフタ110の上昇を制御して積載されている最上位のタバコパッケージSTPを所定のタバコ取出位置に配置する。商品取出ユニット140がタバコ取出位置に配置された最上位のタバコパッケージSTPを側方に取り出す。傾斜したローラコンベア150が側方に取り出されたタバコパッケージSTPを搬送する。
(もっと読む)
缶蓋列用移動装置
【課題】所定数量に仕切られた缶蓋列を、高速で、かつ、正確に、インフィード手段からディスチャージ手段に移動させることができ、また、エアシリンダなどによる異常停止を効果的に防止したり、あるいは、定期メンテナンスの際、効率よくエアシリンダなどを交換することができる、生産性及び経済性などに優れた缶蓋列用移動装置、及び、缶蓋製造装置の提供を目的とする。
【解決手段】缶蓋列用移動装置1は、インフィード手段2、ピックアップ手段3、ディスチャージ手段4、及び制御手段5を備え、ピックアップ手段3が、インフィード手段2から所定数量に仕切られた缶蓋列11を摘み上げ、ディスチャージ手段4に移動させる。
(もっと読む)
搬送制御方法、搬送制御装置およびコンピュータプログラム
【課題】 対象となる搬送ロット(=要素)の数が30程度を超える場合でも、山立てに関する制約条件を満たし、山高さを最大化する指標と搬送回数を最小化する指標とのバランスを任意に調整できるよう要請された山仕分け問題に対し、ヒューリスティク解法に頼らず、かつ対象を分割することなく、要請される許容可能な時間内に厳密な最適解を導出する山仕分け計画を実現する。
【解決手段】 払出山を作成する対象となる複数の鋼材についての鋼材情報に基づいて、複数の鋼材を複数の払出山に分ける山仕分けを決定し、その山仕分けとヤードの状態とに基づいて山立てするように搬送機器に搬送作業を指示するに際し、山高さを最大化する指標と搬送回数を最小化する指標とを持つ目的関数を設定し、山立て及び搬送に関する制約条件を満たす数理計画問題に帰着させ、山仕分けを最適化する技術を提供する。
(もっと読む)
基板取出機構及びこれを備えた基板供給装置
【課題】 吸引作用を利用することなく基板を一枚ずつ取り出すことができる基板取出機構を提供すること。
【解決手段】 積層された複数枚の基板から最上位の基板を把持して取り出すための基板取出機構。この基板取出機構は、支持本体97に相互に対向して支持された第1及び第2アーム部材86,88と、第2アーム部材88を第1アーム部材86に対して近接及び離隔する方向に移動させるためのアーム駆動手段96と、第1及び第2アーム部材86,88に装着された第1及び第2把持部材98,110とを備えている。第1把持部材98には、上方に向けて第2アーム部材88側に傾斜する第1傾斜面102が設けられ、また第2把持部材88には、上方に向けて第1アーム部材86側に傾斜する第2傾斜面114が設けられている。
(もっと読む)
育苗ポット詰替装置
【課題】把持部材が育苗ポットを把持する性能を向上させることができるポット詰替装置を提供すること。
【解決手段】把持部材2を構成する各板状片2aの育苗ポットと接触する部分を含む面の略全面には、その表面が鑢状に形成された可撓性を有するシート体21が貼着されている。よって、把持部材2を育苗ポットの内側に圧入した場合には、鑢状に形成された面が滑り止めとなって、その接触部分が育苗ポットの内面にしっかりと引っ掛かり、把持部材2によって確実に育苗ポットを把持することができる。
(もっと読む)
箱状ワーク認識装置および方法
【課題】箱状ワークを対象とし、ワークが密着している場合や荷崩れの場合でもピッキングするワークの位置と姿勢を高い精度で認識することができる箱状ワーク認識装置および方法を提供する。
【解決手段】隣接して荷積みした複数の箱状ワーク1を上方から撮影して全体画像を取得する単眼カメラ11と、複数の箱状ワーク全体の3次元形状を計測する距離センサ12と、全体画像から箱状ワークのエッジ部分を検出し、エッジ部分を境界として3次元形状から各箱状ワークの位置と姿勢を認識し、ピッキングする箱状ワークの位置と姿勢を出力する物体認識処理装置16とを備える。
(もっと読む)
買い物籠自動傾け装置
【課題】客が取りやすいように買い物籠を自動で傾けることが可能な装置を提供する。
【解決手段】積み重ねられた複数の買い物籠200が載置される籠載置部110と、操作対象となる一番上の買い物籠200aの操作を行う一対の籠操作部130とを備え、前記一対の籠操作部130が、操作対象となる一番上の買い物籠200aの開口部の周囲に形成された張り出し部の下に、当該買い物籠200aの両側から差し入れられ、そのままの状態で上昇することにより、操作対象となる一番上の買い物籠を斜めに傾ける。
(もっと読む)
段積み部品取出し装置
【課題】段積みされた部品を効率良く取出す装置を提供する。
【解決手段】平面上で位置決めできる本体と、本体に取り付けられたアクチュエータ62と、該アクチュエータ62により駆動されて上昇端位置α1と下降端位置の2ポイントの位置で上下動する上下本体63と、該上下本体63に自重で上下動できるように貫通状態で設置された自重上下軸41と、該自重上下軸41がその下降端位置にあることを検出するセンサPH1とを具備する段積み部品取出し装置において、前記自重上下軸41の上端部には、自重で下降することを停止させる自重軸ストッパ45が設けられ、前記自重上下軸41の下端部には、部品を把持するチャック21と、前記自重上下軸41を部品上面で停止させるためのストッパ51が設けられていることを特徴とする。
(もっと読む)
梱包箱移載・搬出装置
【課題】荷降し時に梱包箱の下面全体が下方の梱包箱の凹凸のある上面に当たっているため、引っ掛かり易い。
【解決手段】梱包箱積重集合体X及び搬出装置2の上方に梱包箱W、Wa…の移載手段1を上下動可能に配設し、該梱包箱移載手段1は、並列配置された複数個の吸着部3、3a…と、該吸着部3、3a…を水平方向に進退自在にして上方に移動可能にする移動部4とを有し、吸着部3、3a…は夫々が独立して後退可能に移動部4に取り付けられ、吸着部3、3a…の前部に吸着体8、8a…を上下・左右方向に揺動可能に取り付けて、梱包箱W、Wa…への吸着後の吸着部3、3a…を移動部4により上動且つ後退させる様にすることによって、梱包箱W、Wa…を、各吸着部3、3a…は装着対象の梱包箱W、Wa…の吸着側面に対し略直角の姿勢を維持させつつ吸着側だけを持ち上げてその反対側のみ接地状態の斜め姿勢で後方に引きずる様に移動させることを可能にする。
(もっと読む)
11 - 20 / 56
[ Back to top ]