
国際特許分類[B65G59/04]の内容
処理操作;運輸 (1,245,546) | 運搬;包装;貯蔵;薄板状または線条材料の取扱い (154,615) | 運搬または貯蔵装置,例.荷積みまたは荷あげ用コンベヤ;工場コンベヤシステム;空気管コンベヤ (20,388) | 物品の積みおろし (253) | 積み山の頂上からの積みおろし (87) | 吸引または磁石装置によるもの (31)
国際特許分類[B65G59/04]に分類される特許
1 - 10 / 31
成形用ブランク枚数判別装置及び同判別方法
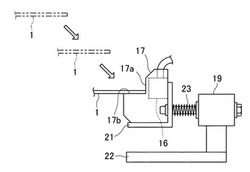
【課題】搬送装置で持ち上げられて保持された成形用ブランク1のブランク枚数を簡単に且つ精度良く検出する。
【解決手段】成形用ブランク1の厚さを検出する非接触式の磁気センサ16と、該センサ16の検出値に基いて成形用ブランク1の枚数を判別する枚数判別手段と、搬送装置が持ち上げている成形用ブランク1を、その端面がセンサ1に対してブランク厚さの検出に適した定位置で対面するように位置決め支持する樹脂製のブランク受け17とを備えた構成とする。
(もっと読む)
太陽電池セルの移送装置およびその移送方法

【課題】積層された多数枚の太陽電池セルのうちの最上層の太陽電池セルのみを破損することなく確実に取り出すとともに、寸法精度を確保して移送する。
【解決手段】水平な下面を有するフラットテーブル4を備え、最上層の太陽電池セルを吸着する位置と上方に退避した位置との間を昇降自在で、太陽電池セルの退避位置と移送位置との間を移送自在なベース3と、フラットテーブル4の幅方向中央を貫通してベース3に対して昇降自在な吸着パッド7と、フラットテーブル4の四隅をそれぞれ貫通するとともに、下端面がフラットテーブル4の下面よりも下方に突出して設けられた規正パッド8とから構成される。そして、吸着パッド7を介して太陽電池セルの幅方向中央部を吸着してフラットテーブル4の下面に接触するように持ち上げるとともに、規正パッド8を介して太陽電池セルの四隅を吸着してフラットテーブル4の下面に沿わせる
(もっと読む)
移載装置
【課題】簡単な構造で一回の取出操作で移動する金属部品の数を増やして作業効率を向上させることができる移載装置を提供する。
【解決手段】磁性体である金属部品を収容する容器の近傍に設けられた移動機構と、移動機構に連結され任意の方向に移動するアーム部材を有する。アーム部材の先端部に取り付けられた電磁石36と、電磁石36に対して移動自在に取り付けられた磁性体の金属板38を備える。金属板38は、周縁部に凹部42と凸部44を備え、凹部42と凸部44が電磁石36の外側へ突出している。金属板38は、その中心を通過して一方向に長い長孔40を有し、電磁石36は、金属板38の長孔40に差し込まれて金属板38を摺動及び回転可能に係止する係止フランジ部46を備える。
(もっと読む)
容器群段おろし装置及び容器群段おろし方法
【課題】簡易な装置構成でありながら、多様な形状、素材、剛性及び重量の段積みされている容器群を損傷させず、不規則な容器の配置にも対応可能で、しかも容器群の間に挿入されている副資材を取り除きつつ迅速に段おろしできる段おろし装置及び方法を提供する。
【解決手段】容器群段おろし装置1は、幅広い種類の容器を吸引保持可能な負圧特性を有する吸引ヘッド、吸引ヘッドの移動手段であるロボット3及び負圧供給手段を具備する保持搬送装置10を備えている。保持搬送装置10の吸引ヘッドで容器群と副資材を一体化して保持搬送し、一連の段おろし操作を行う。即ちパレット20上の容器群11とセパレートシート12を吸引ヘッドで吸引保持した後、副資材ボックス22上で把持手段によりセパレートシート12を分離して容器群のみを搬出コンベア21上に移動させる。この操作を繰り返して段おろしを完了する。
(もっと読む)
天板移送装置
【課題】
天板をコンベアより外す際に,直接天板に作用する装置を用いることなく天板を確実に外し,金属同士が接触することのない天板移送装置とする。
【解決手段】
天板移送装置に次の手段を採用する。
第1に,天板を吸着保持して搬送方向に回動する磁力を有しないコンベアと,移動しないが磁力を有し,コンベアの下側コンベアベルトより上方で,かつ,吸着保持された天板に接することがない位置に設置されたマグネット部材とを有する移送コンベアを備える。
第2に,天板を,受け取り位置でマグネット部材の磁力により下側コンベアベルトに吸着保持し,受け渡し位置まで搬送し,受け渡し位置で外すよう構成する。
第3に,受け渡し位置におけるマグネット部材を,昇降可能として,天板が受け渡し位置に至ったとき,マグネット部材を上昇させ,天板へ作用する磁力を軽減させて,下側コンベアベルトから天板を外す天板外し装置を設ける。
(もっと読む)
ALC板の自動搬送装置
【課題】ALC板の待機場所のスペースを最小限にすると共に、真空吸着時の空気漏れを防止して、安定な搬送を実現する。
【解決手段】吸着ダクト17内の空間は仕切板22によって仕切られることにより、複数の吸着セル23が形成されている。仕切板22の高さは吸着ダクト17の天井の高さにより低くなっており、これにより、吸着セル23の各空間はそれらの上方空間24を介して吸引ホース18に連通するようになっている。更に、仕切板22のALC板側の端面には、ゴム材のような弾力性のある弾性材25が接着されている。真空吸着時にこの弾性材25がALC板100の上面に密着して空気漏れを防止することになる。
(もっと読む)
デパレタイズ装置および方法
【課題】第1位置において、複数のワークの位置と姿勢がランダムである場合でも、複数のワークを同時または集中して搬送することができ、第2位置において、ワークの向きを整列させることができ、ワークに吸着しにくい箇所があっても、効率よくワークを移載することができるデパレタイズ装置および方法を提供する。
【解決手段】1又は2以上の第1位置2にランダムに位置する複数の同一ワーク1を1又は2以上の第2位置4に移載するデパレタイズ装置10。第1位置において複数のワークを上方から撮像する撮像装置12と、撮像した画像から各ワークの上面位置と向きを検出する画像処理装置14と、ワークの上面を吊り上げ可能に吸着するロボットハンド20を有する搬送ロボット16と、搬送ロボットを制御する制御装置18とを備える。ロボットハンド20は、その下面に複数のワークを同時に吸着可能でありかつそれぞれ独立に吸着力を制御可能な複数の吸着部21を有する。
(もっと読む)
ピッキング装置と方法
【課題】物品の高さ方向位置をほとんど考慮することなく、最上段物品を取り出すことができ、これにより、安定してかつ短時間で物品を取り出すことができるようにする。
【解決手段】台3に積載された物品1を台3から取り出すピッキング装置10であって、台3には物品1が上下複数段に積まれており、上下複数段の物品1のうち最上段にある最上段物品1の高さが、所定の物品取出高さHに位置しているかを検出する高さ検出器5と、台3を昇降させ、台3の昇降中に最上段物品1の高さが物品取出高さHに位置することを高さ検出器5が検知すると、台3の昇降を停止する昇降装置7と、物品取出高さHに位置する最上段物品1を台3から取り出す取出装置9と、を備える。
(もっと読む)
保持搬送装置
【課題】種々の重量や形状を有する物品を、塑性変形や破損を起こさせることなく、且つ充分な吸引力によって安定して保持して搬送することが可能な保持搬送装置を提供する。
【解決手段】本発明の保持搬送装置1は、複数の吸引孔を有する物品吸着面が設けられた吸引ヘッド2と、吸引ヘッド2の吸引室9に連結された負圧供給手段4とを備えている。この負圧供給手段4は、吸引ヘッド2が物品吸着面に物品を当接させて物品を吸引保持する際に、前記物品吸着面のほぼ全領域に前記物品が配置されて大多数の吸引孔から外気を直接吸引しない状態で前記物品をほとんど塑性変形させることなく吸引保持することができ、且つ、前記物品吸着面に物品が当接していない領域が広く前記物品に当接していない多くの吸引孔から外気を直接吸引する状態でも物品の吸引保持を維持できるような負圧を吸引ヘッド2にもたらすことができるよう広い風量の領域に対して低くフラットな吸込み側静圧特性を有している。
(もっと読む)
ワインダー用コアの移載装置
【課題】ワインダー用コアを、X軸、Y軸又はZ軸を組み合わせた2軸方向又は3軸方向に移動させて、ワインダー装置に移載することができるワインダー用コアの移載装置を提供する。
【解決手段】コアwが収容された容器99に臨む位置に設けた、容器のコアを取り出す開口部の位置よりも高さを有する基体1と、この基体の上部に基端部が回動可能に連結された細長状の上腕部2と、この上腕部の先端部に基端部が回動可能に連結された細長状の前腕部3と、この前腕部に垂設されて、上記コアを吸着可能なハンドリング部4とを有し、かつ上記上腕部を駆動させる上腕駆動手段5と、上記前腕部を駆動させる前腕駆動手段とをそれぞれ上記基体の上部に設けた円筒状のコアをワインダー装置に移載するワインダー用コアの移載装置とした。
(もっと読む)
1 - 10 / 31
[ Back to top ]