
国際特許分類[F16H19/02]の内容
機械工学;照明;加熱;武器;爆破 (654,968) | 機械要素または単位;機械または装置の効果的機能を生じ維持するための一般的手段 (198,328) | 伝動装置 (51,171) | 本質的に歯車または摩擦部材のみからなり,無限に続く回転運動を伝達することができない伝動装置 (595) | 回転運動と往復運動を相互に変換するためのもの (587)
国際特許分類[F16H19/02]の下位に属する分類
ラックを用いたもの (355)
無端可撓部材を用いるもの (14)
国際特許分類[F16H19/02]に分類される特許
141 - 150 / 218
ワイヤ駆動機構、ロボットアーム機構及びロボット
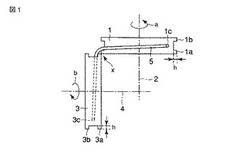
【課題】軽量で、コンパクトにできるワイヤ駆動機構、ロボットアーム機構及びロボットを提供する。
【解決手段】回転軸2を中心に回転するプーリ1と、回転軸2と直交する方向で、回転軸2と同一平面上にあるように配置される回転軸4を中心に回転するプーリ3と、プーリ1周面の所定方向に巻きつけられるとともに、プーリ3周面にプーリ1の巻きつけ方向と反対方向に巻きつけられるワイヤ5を有し、一方のプーリ1の回転によるワイヤ5の引っ張り力により他方のプーリ3に駆動力を伝達可能にする。
(もっと読む)
摩擦駆動搬送装置の駆動機構

【課題】 搬送テーブルの高速移動と、位置決め分解能の高い低速移動を実施できるようにする。
【解決手段】 駆動モータ8の出力軸8aに、小径の中間ローラ11と、スライドバー2の一側面に接触、離反可能な大径の高速移動用駆動ローラ10とを同軸に取り付ける。中間ローラ11よりも大径の減速ローラ14を、中間ローラ11に対して接触、離反可能に設け、減速ローラ14に上端部を取り付けた動力伝達軸15の下端部に、スライドバー2の他側面に接触、離反可能な小径の低速移動用駆動ローラ13を取り付ける。駆動モータ8の回転数と同じ回転数で回転駆動される高速移動用駆動ローラ10をスライドバー2に接触させる状態と、中間ローラ11と減速ローラ14との径の比に反比例して減速された回転数で回転駆動される低速移動用駆動ローラ13をスライドバー2に接触させる状態とを切り替えて搬送テーブル1の移動を行わせる。
(もっと読む)
ベルト伝動装置及びそれを備えたロボット
【課題】アイドラプーリを使用せずに簡単な構成でベルトのテンションを調整することができ、テンション調整部の省スペース化や軽量化を実現できるベルト伝動装置を提供する。
【解決手段】1対の回転軸に第1プーリ、第2プーリを配置し、第1の有端ベルトの一端を調整ブロックを介して第1プーリの外周上側に、他端を第2プーリの外周上側に取り付ける。第2の有端ベルトの一端は第1プーリの外周下側に、他端は第1のベルトの巻き掛け方向と逆にして第2プーリの外周下側に取り付ける。第1プーリには調整ブロックの取り付け部に案内部とネジ穴を設ける。ネジ穴へ挿入できるテーパ部を有するテンション調整ネジをねじ込むことによって、調整ブロックを案内部に沿って位置を調整し、第1と第2ベルトの両方のテンションを調整する。調整後はテンション調整ネジを取り外す。
(もっと読む)
ベルト駆動機構及びそれを備えたメディア処理装置
【課題】移動体が異常停止するなどしてタイミングベルトの駆動負荷が増加しても、機器の損傷を防ぐとともにユーザに対する安全性を保障することのできるベルト駆動機構及びそれを備えたメディア処理装置を提供する。
【解決手段】ベルト駆動機構100は、トレイモータ124によって回転されるトレイ駆動プーリ111と回転可能に支持されたトレイ従動プーリ112とにトレイベルト113が巻き掛けられ、トレイベルト113によってメディアトレイ51を移動させるものであって、付勢部材143により移動可能に支持されるプーリ支持部142を有し、付勢部材143によりプーリ支持部142を介してトレイベルト113に張力を付与する張力付与機構141を備え、トレイ駆動プーリ111は、トレイベルト113の張力増加時に付勢部材143の付勢力に抗してプーリ支持部142が変位することにより、その回転駆動力が減少するように制御される。
(もっと読む)
旋回テーブル装置
【課題】ターンテーブル(20)の回転初期や、回転方向の反転時でも、該ターンテーブル(20)の円滑回転が確保できるようにすると共に、装置全体の小型化を図り、更に、構造の複雑化を防止してコスト高を抑制する。
【解決手段】ワークを装着する為のターンテーブル(20)と、前記ターンテーブル(20)の回転軸と同軸の円状又は円弧状に曲成され、且つ前記ターンテーブルと一体回転するレール部材(29)と、前記レール部材を挟圧する一対の駆動ローラ(5a)(5b)と、一方の駆動ローラ(5a)を回転させる駆動モータ(4)と、各駆動ローラ(5a)(5b)のローラ軸に取り付けられて駆動モータ(4)の回転を他方の駆動ローラ(5b)(5a)に伝達する一対の反転ローラとを具備すること。
(もっと読む)
ベルト駆動機構の制御方法、ベルト駆動機構及びそれを備えたメディア処理装置
【課題】移動体の原点位置を高精度に検出し、移動体を精度良く位置検出して移動体に保持させた被処理物に対する高品質な処理を行うことが可能なベルト駆動機構の制御方法、ベルト駆動機構及びそれを備えたメディア処理装置を提供する。
【解決手段】ベルト駆動機構100は、トレイモータ124によって回転されるトレイ駆動プーリ111と回転可能に支持されたトレイ従動プーリ112とにトレイベルト113が巻き掛けられ、トレイベルト113の走行によってトレイベルト113の一部に固定されたメディアトレイ51を移動させる機構であって、メディアトレイ51の移動経路の一端側に設けた移動規制部材132にメディアトレイ51を移動させて突き当てた後、トレイモータ124によるトレイ駆動プーリ111の回転を停止させ、所定時間経過後にメディアトレイ51の位置検出を行いメディアトレイ51の原点位置Oとする。
(もっと読む)
ベルト駆動機構及びそれを備えたメディア処理装置
【課題】移動体を高精度に移動させ、この移動体に保持させた被処理物に対する処理の品質を向上させることが可能なベルト駆動機構及びそれを備えたメディア処理装置を提供する。
【解決手段】ベルト駆動機構100は、トレイ駆動プーリ111とトレイ従動プーリ112とにトレイベルト113が巻き掛けられ、トレイベルト113の走行によってトレイベルト113の一部に固定されたメディアトレイ51を移動させつつ、メディアトレイ51に保持させたメディアMに対してインクジェットヘッド61によって印刷処理を施すものであって、トレイベルト113によるメディアトレイ51の移動方向に沿って設けられたガイド軸102に対してメディアトレイ51がスライド可能に支持され、インクジェットヘッド61によるメディアMへの印刷処理時におけるメディアトレイ51の移動方向前方側にトレイ駆動プーリ111が配置されている。
(もっと読む)
アクチュエータ
【課題】 ボールねじ機構を用いて回転運動を進退運動に変換するアクチュエータの摩擦抵抗を低減する。
【解決手段】 電動モータ52の回転軸55によりピニオン56を回転させると、そのピニオン56に噛合する螺旋ギヤ57が設けられた出力軸54が回転し、その出力軸54の外周に設けた雄ねじ60と固定された雌ねじ59とをボール61を介して噛合させたボールねじ機構53が作動することで、出力軸54を進退運動させることができる。このとき、出力軸54の外周に設けた螺旋ギヤ57がボールねじ機構53と同一ピッチpを有するので、出力軸54が進退運動してもピニオン56と螺旋ギヤ57との噛合が外れることがない。そして出力軸54をスプラインやピンで回り止めしながら進退させる必要がないので、出力軸54が進退する際の摺動抵抗を最小限に抑えるとができる。
(もっと読む)
直線移動装置
【課題】可動体のストロークに比較して小型であると共に設置方向に制約のない直線移動装置を提供する。
【解決手段】直線移動装置が、固定的な装置本体1と、往復直線移動可能に装置本体1に支持される第1可動体10と、第1可動体10を移動させる駆動手段30と、第1可動体10の移動方向と平行に往復直線移動可能に第1可動体10に支持される第2可動体20と、第1可動体10に軸支されて移動方向で互いに離間された第1及び第2プーリ40、50と、装置本体1に一端60a、70aが固定され、他端60b、70bが第2可動体20に固定され、それぞれの中間部分が第1及び第2プーリ40、50に互いに反対方向でそれぞれ巻き掛けられた第1及び第2ベルト60、70とを具備し、第1可動体10の往復直線移動が第2可動体20の往復直線移動を引き起こす。
(もっと読む)
物品の直線搬送装置、及び当該装置におけるベルト体の張力調整方法
【課題】
第1及び第2の各平行リンク機構の連結部に設けられたベルト伝動機構を構成する一対のベルト体の張力調整を容易にすることである。
【解決手段】
第1及び第2の各平行リンク機構LD1 ,LD2 が中間リンク台Eで連結されて、当該中間リンク台Eを構成する上下一対の中間リンク板5が左右一対の中間連結軸S3a, S3bで連結されて、当該中間連結軸S3a, S3bに支持された左右一対の各プーリ体P1,P2 に互いに逆方向の第1及び第2の各ベルト体V1,V2 が部分巻回されて、中間リンク台Eにおいて第1平行リンク機構LD1 の正逆両方向の回動力を第2平行リンク機構LD2 に伝達させる構成の物品の直線搬送装置において、前記一対のプーリ体P1,P2 の一方を軸方向に二分割して、各分割プーリ体P1a, P1bに対して前記一対のベルト体V1,V2 の一端部をそれぞれ固定した構成とする。
(もっと読む)
141 - 150 / 218
[ Back to top ]