
国際特許分類[F16H19/02]の内容
機械工学;照明;加熱;武器;爆破 (654,968) | 機械要素または単位;機械または装置の効果的機能を生じ維持するための一般的手段 (198,328) | 伝動装置 (51,171) | 本質的に歯車または摩擦部材のみからなり,無限に続く回転運動を伝達することができない伝動装置 (595) | 回転運動と往復運動を相互に変換するためのもの (587)
国際特許分類[F16H19/02]の下位に属する分類
ラックを用いたもの (355)
無端可撓部材を用いるもの (14)
国際特許分類[F16H19/02]に分類される特許
171 - 180 / 218
摩擦駆動装置
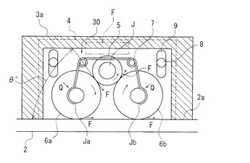
【課題】伝達効率のよい摩擦駆動装置を提供する。
【解決手段】本摩擦駆動装置は、サーボモータMが支持部材4によって摺動ガイド上部3aに連結されて駆動輪5をレール面2aから離して配置し、該駆動輪5と該レール面2aの双方に接触する一対の伝達輪6a,6bを駆動輪5を挟んで対向に配置するとともに摺動ガイド3と独立に配置し、これら一対の伝達輪6a,6bが上記駆動輪5を押圧しつつ互いに接近する方向に押圧力を作用させるねじりコイルばね7を上記摺動ガイド3と独立に設ける。
(もっと読む)
引出駆動装置

引出用の駆動装置(1)であって、モータと、引出に作動力を伝達するための運搬部材(5)と、モータに対して移動可能に設置され、モータによって駆動可能であり、運搬部材を載置支持している搬送体とを含んでおり、運搬部材(5)は搬送体(6)上の運搬部材(5)の移動がモータに対する搬送体(6)の移動によって強制的に制御されるように搬送体(6)と連動している駆動装置が開示されている。 (もっと読む)
動力閉鎖アクチュエータ
様々な自動車の閉鎖デバイスに動力を与える際使用するのに特に適した動力閉鎖アクチュエータである。アクチュエータが出力シャフトを有するブラシレスパンケーキ電気モータと、出力シャフトの太陽歯車と、それぞれが太陽歯車に噛合い係合する大径下方部分、および小径上方部分を有する複数の複合遊星歯車と、遊星歯車の小径上方部分の周囲を囲み、そこに噛合い係合する輪歯車と、輪歯車にスプライン結合されたケーブルドラムを備える。モータの平坦な上面に対して重なって向き合う関係で配置された装着プレートは、モータの出力シャフトに対して円周方向に間隔を置いた関係で装着プレートから上方に延出する複数の遊星シャフトを装着し、複合遊星歯車が各遊星シャフトに軸支されている。  (もっと読む)
(もっと読む)
プーリホルダ
【課題】プーリを軸支する軸を軸支するホルダ本体の軸受けの摩耗を防止する手段を提供する。
【解決手段】プーリホルダ125は、従動プーリ48を軸支する軸本体141、及び軸本体141の軸方向の一方端に軸本体141の軸心G1から偏倚されて軸本体141の軸方向に突設された異径軸142を有する軸138と、軸本体141を支持する軸受け139,140、及び異径軸142と嵌合する嵌合溝143を有するホルダ本体124とを具備してなる。
(もっと読む)
モータアクチュエータ
【課題】支持部材の先端側で被駆動部材を回転させるとともに、支持部材自身についても揺動または直動させる場合でも、被駆動部材の不用意な動きを防止することのできるモータアクチュエータを提供すること。
【解決手段】ルーバ装置において、ルーバ支持部材22に揺動動作および直動動作を行わせる。また、ルーバ支持部材22の先端側でルーバ2を回転させるにあたって、ルーバ支持部材22の基端側に第3のステッピングモータ80を配置し、基端側のプーリ82と、先端側のプーリ85との間にタイミングベルトを掛け渡す。このため、歯車機構を用いた場合と違って、ルーバは、バックラッシュに起因する不用意な動きを行わない。
(もっと読む)
直線送り装置
【課題】直線移動を円滑に行うことができる直線送り装置を提供する。
【解決手段】アイドラプーリ14と駆動プーリ13を設け、それらの間に、移動体12が載置された直線スライドレール11を設ける。移動体12は移動プーリ15を有する。移動プーリ15は、一体に形成された、互いに直径の異なる第1及び第2の移動プーリ15A、15Bから成る。歯付きベルト20は、往路部分Gと復路部分Cが1回交差するように駆動プーリ13とアイドラプーリ14間に掛け回す。歯付きベルト20は、その往路部分Gで第1の移動プーリ15Aに巻き付くとともに、その復路部分Cで第2の移動プーリ15Bに巻き付く。駆動プーリ13が回転し、それに伴い移動プーリ12が一回転すると、第1及び第2の移動プーリ15A、15Bの円周差分だけ、移動プーリ15が移動し、合わせて移動体12も移動する。
(もっと読む)
平行保持機構
【課題】リンクの干渉を避け、比較的大きい作業領域を確保することができ、部品点数が少なく組立が容易であり製作コストを減少することができる平行保持機構を提供する。
【解決手段】平行保持機構10は、回転ジョイント22aが固定され所定長dの直径を有するプーリー12aと、回転ジョイント22bが回転ジョイント22aに対して平行を保持する位置に固定され直径dを有するプーリー12bと、両プーリーを各々回転自在な状態で接続したリンク14と両プーリーを繋ぎ且つ両プーリーを同期して回転させるタイミングベルト16とを備えている。固定された状態で両回転ジョイントの長手方向は相互に平行となっている。タイミングベルト16により両プーリーが回転すると、両回転ジョイント長手方向はyz平面内で常に平行となるため平行リンク機構の動きと同様の動きを実現できる。3自由度の空間並進平行保持機構30には平行保持機構10を用いる。
(もっと読む)
直線送り機構
【課題】
必要に応じて回転シャフト一回転当りの移動子の送り量を調整することができると同時に、回転シャフトに関係なく移動子を自由に往復移動できるようにする。
【解決手段】
回転シャフト(S)に対して所定の捩れ角(θ)をもって圧接される送りローラ(R)を移動子(M)に取り付け、その捩れ角(θ)を調整することにより回転シャフト(S)一回転当たりの移動子(M)の送り量を可変調整する送り量可変機構(L)と、前記送りローラ(R)の回転シャフトに対する圧接力を解除して移動子(M)を移動自在とする送り解除機構(F)を設けた。
(もっと読む)
回転直動式アクチュエータ及びエンジンの可変動弁機構
【課題】より高い効率をもって回転運動を直線運動へ変換することのできる回転直動式アクチュエータ及びエンジンの可変動弁機構を提供する。
【解決手段】この回転直動式アクチュエータ7は、入力された回転運動を直線運動に変換して出力する回転直線運動変換機構8と同運動変換機構8に対して回転運動を入力するモータ71とを備えて構成される。また、回転直線運動変換機構8がモータ71を通じて回転運動するリングシャフト82とリングシャフト82の回転運動を通じて遊星運動する複数のプラネタリシャフト83とプラネタリシャフト83の遊星運動を通じて直線運動するサンシャフト81とを備えて構成される。そして、回転直線運動変換機構8を支持するスラストベアリング91をプラネタリシャフト83に取り付けた。
(もっと読む)
送り装置
【課題】送り装置について位置決め精度・長距離搬送・遠隔搬送・制御性・高精密送り・高速送り・低価格・簡潔構成・省スペース・軽量化・発塵対策・事故発生に対する安全対策を満足させ、運転状態の静穏安定化に基づく高精度化と耐久性の向上と構成のコンパクト化や、線状体の適正な巻き取り巻き戻しに基づく高精度化と耐久性の向上をはかる。
【解決手段】正逆巻付器31・正巻用線状体51・逆巻用線状体61・往復作動体71などを備えている。正巻用線状体51と逆巻用線状体61とが往復作動体71に連結されている。正逆巻取器31のドラム37による正巻用線状体51および巻用線状体61のそれぞれ巻き取り量と巻き戻し量が互いに等しい。巻き取り回転時における正逆巻取器51のドラム37が両線状体51の巻き取りピッチと巻き戻しピッチに対応して軸線方向に移動する。
(もっと読む)
171 - 180 / 218
[ Back to top ]